文章目录
Open3D是一个开源库,支持快速开发和处理3D数据。Open3D在c++和Python中公开了一组精心选择的数据结构和算法。后端是高度优化的,并且是为并行化而设置的。Open3D的核心功能包括:
- 3D 数据结构
- 3D 数据处理算法
- 场景重建
- 表面对齐
- 3D 可视化
- 基于物理渲染 (PBR)
- 支持使用 PyTorch 和 TensorFlow 的 3D 机器学习
- 内核 3D 操作的 GPU 加速
- 在C ++ 和 Python 中可用
python版本的open3d安装很简单,直接执行下列命令即可(使用了镜像安装)
pip3 install open3d -i https://pypi.tuna.tsinghua.edu.cn/simple
直接运行下列命令测试是否安装成功,如果没有报错,则安装成功!
python -c "import open3d as o3d; print(o3d)"
open3d可以通过文件扩展名自动推断文件类型,下面是支持的点云文件类型。
| Format | Description |
|---|---|
| xyz | 每一行包括 [x,y,z] 三个值,x,y,z 是三维坐标 |
| xyzn | 每一行包括 [x,y,z,nx,ny,nz] 六个值,其中nx,ny,nz 是法线 |
| xyzrgb | 每一行包括 [x,y,z,r,g,b] 六个值,这里r,g,b的范围在[0,1]的浮点数 |
| pts | 第一行是一个整数,表示点的个数,之后的每一行可以是下列格式之一:[x, y, z, i, r, g, b], [x, y, z, r, g, b], [x, y, z, i] or [x, y, z],其中x,y,z和i是double类型,r,g,b是uint8类型。 |
| ply | 这个格式可以包含点云和网格数据,可以参考链接 |
| pcd | Point Cloud Data |
也可以显示的指定文件类型,这样将会忽略文件扩展名。
#忽略.txt格式,读取的格式为xyz
pcd =o3d.io.read_point_cloud("../../my_points.txt",format='xyz')
下列代码功能:读取一个pcd文件,并显示,同时将读取的pcd文件进行写入,生成copy_of_fragment.pcd文件。
import open3d as o3d
pcd = o3d.io.read_point_cloud("../test_data/fragment.pcd") # 读取pcd文件
print(pcd) #只是简单的打印信息:PointCloud with 113662 points.
#显示,zoom等信息是一些可选项
o3d.visualization.draw_geometries([pcd])
# o3d.visualization.draw_geometries([pcd], zoom=0.3412,
# front=[0.4257, -0.2125, -0.8795],
# lookat=[2.6172, 2.0475, 1.532],
# up=[-0.0694, -0.9768, 0.2024])
# 在同级目录下写入 copy_of_fragment.pcd文件
o3d.io.write_point_cloud("copy_of_fragment.pcd", pcd)
显示效果:
与点云的数据结构相比,网格(mesh)数据具有定义三维曲面的三角形。默认情况下,Open3D尝试通过文件扩展名推断文件类型。支持以下网格文件类型:
| 格式 | 描述 |
|---|---|
| ply | 同点云 |
| stl | 请查看链接 |
| obj | 请查看链接 |
| off | 请查看链接 |
| gltf | 请查看链接 |
代码举例:
import open3d as o3d
mesh = o3d.io.read_triangle_mesh("../test_data/knot.ply")
print(mesh) #打印简单的信息:TriangleMesh with 1440 points and 2880 triangles.
# 写入(这里是复制)一份新数据
o3d.io.write_triangle_mesh("copy_of_knot.ply", mesh)
#显示
o3d.visualization.draw_geometries([mesh])
输出显示效果:
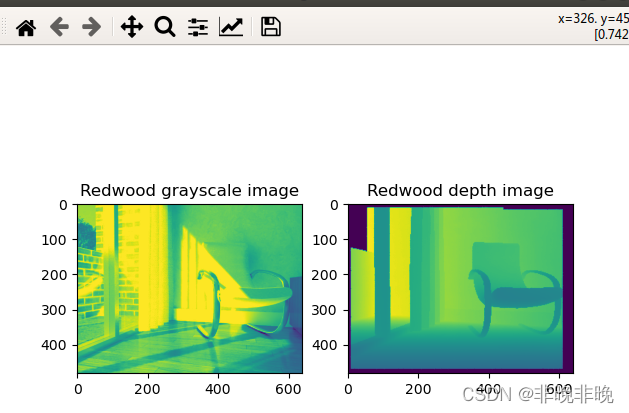
下面的程序先读入jpg的普通图片和png的深度图片,然后合成rgbd的深度图像。
import open3d as o3d
color_raw = o3d.io.read_image("../test_data/RGBD/color/00000.jpg")
depth_raw = o3d.io.read_image("../test_data/RGBD/depth/00000.png")
#创建一个rgbd图像
rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
color_raw, depth_raw)
print(rgbd_image)
#使用matplotlib显示图像
import matplotlib.pyplot as plt
plt.subplot(1, 2, 1)
plt.title('Redwood grayscale image')
plt.imshow(rgbd_image.color)
plt.subplot(1, 2, 2)
plt.title('Redwood depth image')
plt.imshow(rgbd_image.depth)
plt.show()
#rgbd 转==》pcd ,并显示
pcd = o3d.geometry.PointCloud.create_from_rgbd_image(
rgbd_image,
o3d.camera.PinholeCameraIntrinsic(
o3d.camera.PinholeCameraIntrinsicParameters.PrimeSenseDefault))
# Flip it, otherwise the pointcloud will be upside down
pcd.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
o3d.visualization.draw_geometries([pcd])
# image的读取与写入
img = o3d.io.read_image("../test_data/lena_color.jpg")
print(img)
'''
输出:
Image of size 512x512, with 3 channels.
Use numpy.asarray to access buffer data.
'''
# 写入(这里是拷贝)一份新的image数据
o3d.io.write_image("copy_of_lena_color.jpg", img)
输出:
RGBDImage of size
Color image : 640x480, with 1 channels.
Depth image : 640x480, with 1 channels.
Use numpy.asarray to access buffer data.
matplotlib显示图像效果:
RGBD转PCD显示效果:

Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
我即将开始一个将录制和编辑音频文件的项目,我正在寻找一个好的库(最好是Ruby,但会考虑Java或.NET以外的任何库)以进行实时可视化波形。有人知道我应该从哪里开始搜索吗? 最佳答案 要流入浏览器的数据量很大。Flash或Flex图表可能是唯一能提高内存效率的解决方案。Javascript图表往往会因大型数据集而崩溃。 关于ruby-Ruby中的波形可视化,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.c
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶
一段时间以来,我一直在使用open_uri下拉ftp路径作为数据源,但突然发现我几乎连续不断地收到“530抱歉,允许的最大客户端数(95)已经连接。”我不确定我的代码是否有问题,或者是否是其他人在访问服务器,不幸的是,我无法真正确定谁有问题。本质上,我正在读取FTPURI:defself.read_uri(uri)beginuri=open(uri).readuri=="Error"?nil:urirescueOpenURI::HTTPErrornilendend我猜我需要在这里添加一些额外的错误处理代码...我想确保我采取一切预防措施来关闭所有连接,这样我的连接就不是问题所在,但是我
我对图像处理完全陌生。我对JPEG内部是什么以及它是如何工作一无所知。我想知道,是否可以在某处找到执行以下简单操作的ruby代码:打开jpeg文件。遍历每个像素并将其颜色设置为fx绿色。将结果写入另一个文件。我对如何使用ruby-vips库实现这一点特别感兴趣https://github.com/ender672/ruby-vips我的目标-学习如何使用ruby-vips执行基本的图像处理操作(Gamma校正、亮度、色调……)任何指向比“helloworld”更复杂的工作示例的链接——比如ruby-vips的github页面上的链接,我们将不胜感激!如果有ruby-
我有一个super简单的脚本,它几乎包含了FayeWebSocketGitHub页面上用于处理关闭连接的内容:ws=Faye::WebSocket::Client.new(url,nil,:headers=>headers)ws.on:opendo|event|p[:open]#sendpingcommand#sendtestcommand#ws.send({command:'test'}.to_json)endws.on:messagedo|event|#hereistheentrypointfordatacomingfromtheserver.pJSON.parse(event.d
我正在尝试解析网页,但有时会收到404错误。这是我用来获取网页的代码:result=Net::HTTP::getURI.parse(URI.escape(url))如何测试result是否为404错误代码? 最佳答案 像这样重写你的代码:uri=URI.parse(url)result=Net::HTTP.start(uri.host,uri.port){|http|http.get(uri.path)}putsresult.codeputsresult.body这将打印状态码和正文。