【rotors】多旋翼无人机仿真(一)——搭建rotors仿真环境
【rotors】多旋翼无人机仿真(二)——设置飞行轨迹
【rotors】多旋翼无人机仿真(三)——SE3控制
【rotors】多旋翼无人机仿真(四)——参数补偿和PID控制
【rotors】多旋翼无人机仿真(五)——多无人机仿真
本贴内容参考两位博主的内容:
月照银海似蛟
Reed Liao
无人机仿真主要分为两类:硬件在环仿真(HITL)和软件在环仿真(SITL全称Software in the loop)。
无人机软件在环仿真是指完全用计算机来模拟出无人机飞行时的状态,而硬件在环仿真是指计算机连接飞控板来测试飞控软件是否可以流畅运行。一般来说硬件在环仿真若没有加上真实的转台进行测试的话,其与软件在环仿真没有很大的区别。
在无须解决在研发过程中的硬件问题带来的麻烦,并且可以直观的调试代码,搭建一套无人机仿真系统,对于研发来说好处是数不剩数的。
RotorS 是ETH(苏黎世联邦理工大学)研究团队开发的一个ROS包,GITHUB地址
提供了几种多旋翼仿真模型,例如
但是仿真系统不限于使用这几种模型
AscTec 是 德国Ascending Technologies公司的缩写。
是很早的无人机了,实物张下面这个样子:

仿真系统中包含很多种仿真传感器,都可以安装在无人机上,例如:
功能包中包含了两种控制器,后面会详细介绍控制器的实现
rotors官网提供的配置教程是Ubuntu 16.04 with ROS Kinetic、Ubuntu 14.04 with ROS Indigo , 这里我的配置是Ubuntu 18.04 with ROS melodic
安装前已经安装好了ROS melodic和gazebo11(melodic默认安装的是gazebo9,但9不太稳定,升级为11了)
(1)安装依赖安装包
# 如果是其他ros版本就把melodic改为自己ros版本名字
sudo apt-get install ros-melodic-joy ros-melodic-octomap-ros python-wstool python-catkin-tools protobuf-compiler
sudo apt-get install libgeographic-dev ros-melodic-geographic-msgs
(2)创建文件夹并初始化工作空间
mkdir -p ~/UAV_rotors/src
cd ~/UAV_rotors/src
catkin_init_workspace
(3)git下载rotors源码
cd ~/UAV_rotors/src
git clone git@github.com:ethz-asl/rotors_simulator.git
git clone git@github.com:ethz-asl/mav_comm.git
git clone git@github.com:ethz-asl/glog_catkin.git
git clone git@github.com:catkin/catkin_simple.git
注意这里git需要提前登录github账号并绑定自己电脑ssh,否则不能正常git,绑定方法参考这个
(4)编译源码
cd ~/UAV_rotors
catkin init # 只需运行一次,后续如果修改源码重新编译不需要再执行
catkin build
# 在.bashrc文件中添加环境变量
source ~/UAV_rotors/devel/setup.bash
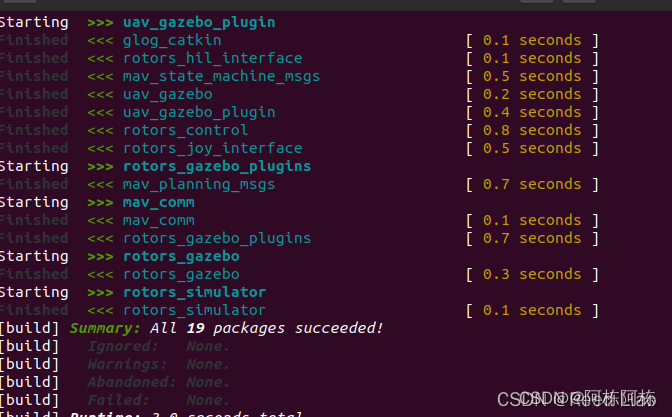
编译一切正常会输出如下结果:
但不出意外的话,大家或多或少会报一些错误,下面是我编译过程中的遇到的错误(编译过程中优先解决编译错误地方,编译警告的先放着):
问题:
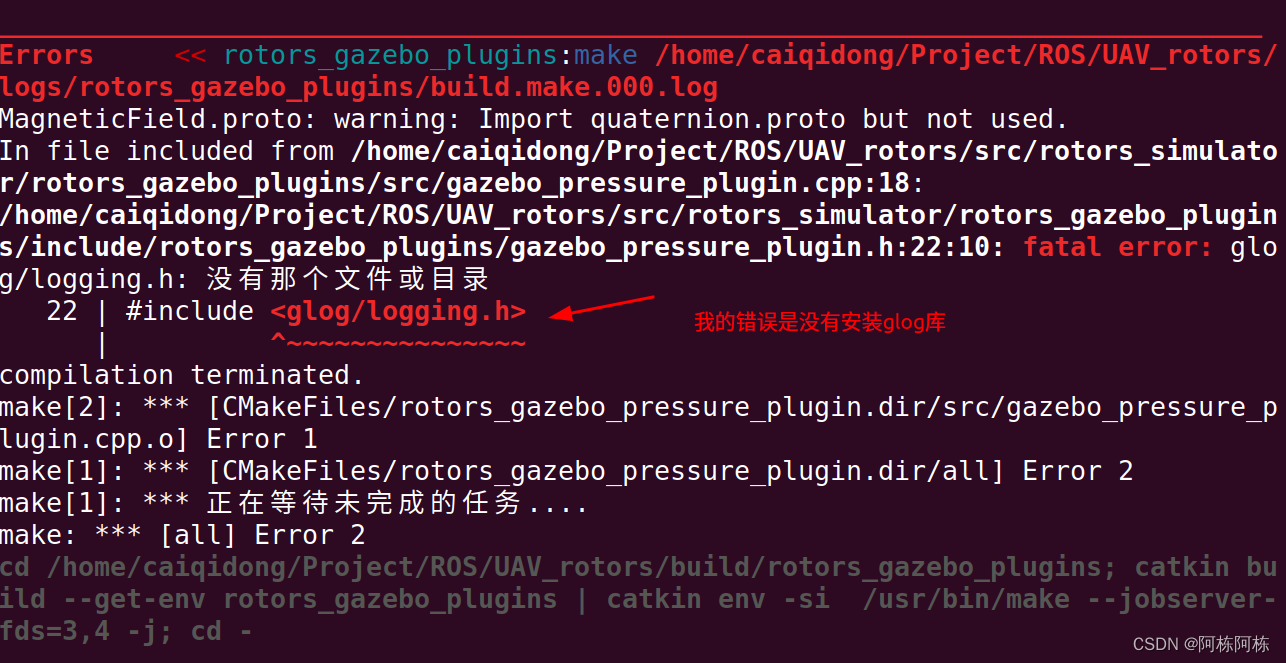
解决:
安装编译glog库,安装方法如下:
# 安装gflags
git clone https://github.com/gflags/gflags.git
cd gflags
mkdir build && cd build
cmake .. -DGFLAGS_NAMESPACE=google -DCMAKE_CXX_FLAGS=-fPIC ..
make -j4
sudo make install
# 安装glog
git clone https://github.com/google/glog
cd glog
mkdir build && cd build
cmake -DGFLAGS_NAMESPACE=google -DCMAKE_CXX_FLAGS=-fPIC -DBUILD_SHARED_LIBS=ON ..
make -j4
sudo make install
如果编译安装过程中报错说cmake版本太低需要升级版本,可参考这个
(5)运行rotors
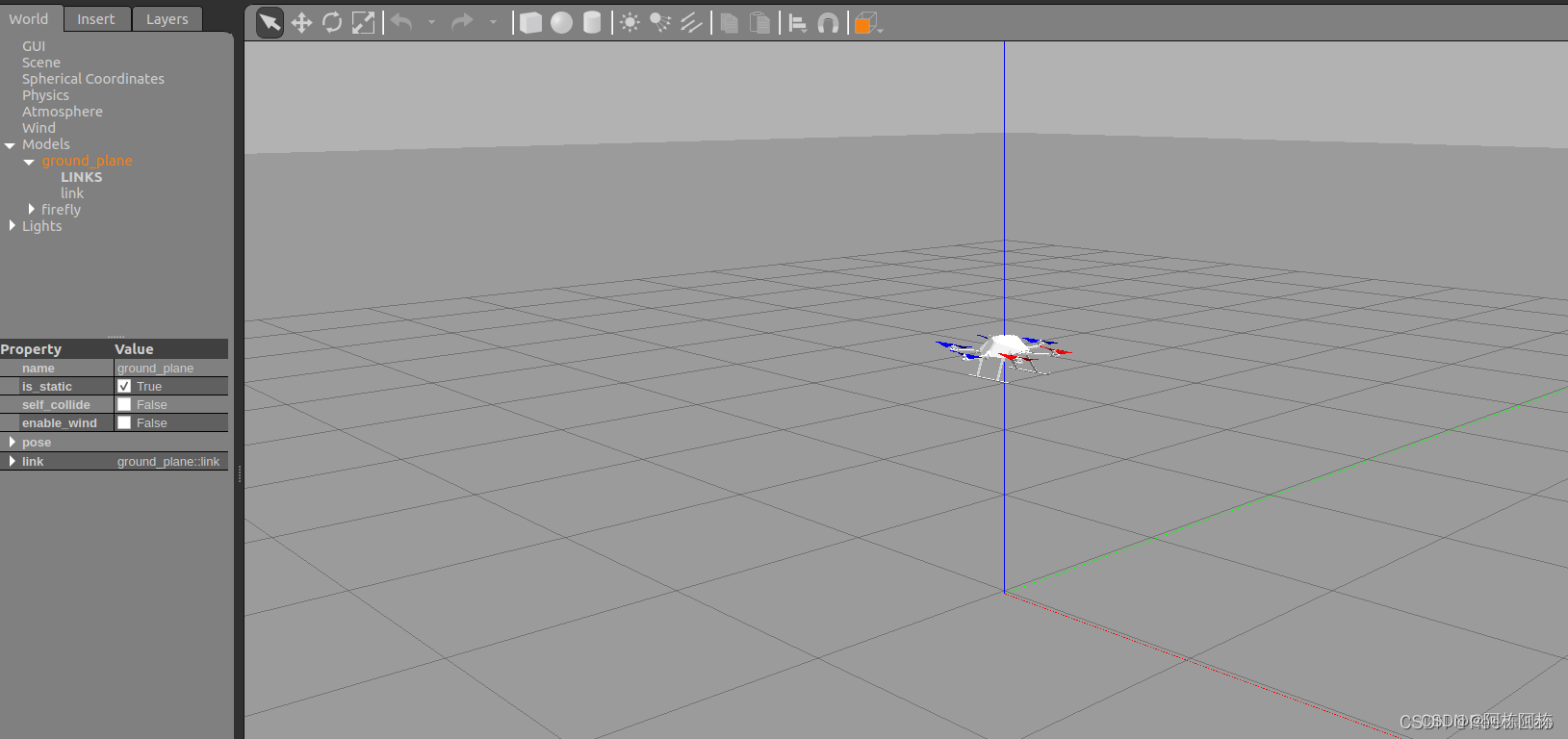
rotors中有许多种机型,包括固定翼、多旋翼等,这里以四旋翼为例,进行仿真,在终端运行下面命令:
roslaunch rotors_gazebo mav_hovering_example.launch mav_name:=firefly world_name:=basic
执行之后,gazebo会自动启动,出现下面的画面,则表示大功告成:
在~/UAV_rotors/src/rotors_simulator/rotors_gazebo/launch文件夹中有许多启动程序的launch文件,使用较多的有两个:mav_hovering_example.launch和mav_hovering_example_with_vi_sensor.launch,后者比前者多启动了深度摄像头传感器。
我们来看看mav_hovering_example_with_vi_sensor.launch:
<!-- 启动无人机仿真,带深度摄像头传感器 -->
<!-- 参数: -->
<!-- mav_name:无人机类型,可以在rotors_description/urdf中查看型号-->
<!-- 六翼无人机:firefly、neo11、neo9-->
<!-- 四翼无人机:pelican、ardrone、asymmetric_quadrotor、hummingbird、iris-->
<!-- world_name:仿真环境,可选择worlds文件夹下的文件-->
<launch>
<arg name="mav_name" default="firefly"/>
<arg name="world_name" default="basic"/>
<arg name="enable_logging" default="false" />
<arg name="enable_ground_truth" default="true" />
<arg name="log_file" default="$(arg mav_name)" />
<env name="GAZEBO_MODEL_PATH" value="${GAZEBO_MODEL_PATH}:$(find rotors_gazebo)/models"/>
<env name="GAZEBO_RESOURCE_PATH" value="${GAZEBO_RESOURCE_PATH}:$(find rotors_gazebo)/models"/>
<!-- 启动gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find rotors_gazebo)/worlds/$(arg world_name).world" />
<!-- <arg name="debug" value="true"/> -->
<arg name="paused" value="true"/>
<!-- <arg name="gui" value="false"/> -->
<!-- <arg name="verbose" value="true"/> -->
</include>
<group ns="$(arg mav_name)">
<!-- 导入无人机模型 -->
<include file="$(find rotors_gazebo)/launch/spawn_mav.launch">
<arg name="mav_name" value="$(arg mav_name)" />
<arg name="model" value="$(find rotors_description)/urdf/mav_with_vi_sensor.gazebo" />
<arg name="enable_logging" value="$(arg enable_logging)" />
<arg name="enable_ground_truth" value="$(arg enable_ground_truth)" />
<arg name="log_file" value="$(arg log_file)"/>
</include>
<!-- 启动无人机控制节点 -->
<node name="lee_position_controller_node" pkg="rotors_control" type="lee_position_controller_node" output="screen">
<rosparam command="load" file="$(find rotors_gazebo)/resource/lee_controller_$(arg mav_name).yaml" />
<rosparam command="load" file="$(find rotors_gazebo)/resource/$(arg mav_name).yaml" />
<remap from="odometry" to="odometry_sensor1/odometry" />
</node>
<!-- 启动无人机轨迹控制命令节点 -->
<node name="hovering_example" pkg="rotors_gazebo" type="hovering_example" output="screen"/>
<!-- 启动仿真关节节点 -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
</group>
</launch>
launch文件中有两个比较重要的参数:一个是mav_name 无人机型号,这个可以在rotors_description/urdf文件夹下查看有那些无人机型号的建模文件;一个是world_name 仿真环境名字,这个可以在rotors_gazebo/worlds文件夹中查看,需要注意的是如果选择比较复杂的world_name 如 outdoor,仿真环境会加载gazebo官方的一些模型,如果你没有提前下载好这些模型,会导致gazebo打不开,因为此时gazebo正在联网下载这些模型,需要自己提前把官方的全部模型下载到gazebo中。
此外launch还加载了两个节点程序:lee_position_controller_node 、 hovering_example,前者就是无人机的控制节点,后者是给无人机发送轨迹点节点 , 后面会解释说明这两个节点。
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
我试图在rails中了解rubygems是如何变得可以自动使用的,而不是在使用required的文件中gem? 最佳答案 这是通过bundler/setup完成的:http://bundler.io/v1.3/bundler_setup.html.它在您的config/boot.rb文件中是必需的。简而言之,它首先将环境变量设置为指向您的Gemfile:ENV['BUNDLE_GEMFILE']||=File.expand_path('../../Gemfile',__FILE__)然后它通过要求bundler/setup将所有ge
从一开始,我就是一个Windows高手。我从MS-DOS开始。我安装了Windows2.1以及此后的所有Windows。现在,我家里有10台不同的Windows机器在运行,从Windows7Ultimate到各种版本的WindowsServer。我还没有完成Windows8,也不想去那里。我在服务器和各种软件方面都有UNIX经验,但它并不是我的首选环境。但是,我想我正在转换。我试图假装使用Cygwin和MSYS在Windows下运行UNIX。我的目的是搭建一个开发环境。两者都让我失望了。我花了比开发更多的时间来解决一系列技术问题。这是NotAcceptable。到目前为止,我的Ruby
如果特定语言环境中缺少翻译,如何配置i18n以使用en语言环境翻译?当前已插入翻译缺失消息。我正在使用RoR3.1。 最佳答案 找到相似的question这里是答案:#application.rb#railswillfallbacktoconfig.i18n.default_localetranslationconfig.i18n.fallbacks=true#railswillfallbacktoen,nomatterwhatissetasconfig.i18n.default_localeconfig.i18n.fallback
我给自己买了一个新的8gigUSBkey,我正在寻找一个合适的解决方案来拥有一个可移植RoR环境来学习。我在谷歌上搜索了一下,发现了一些可能性,但我很想听听一些现实生活中的经历和意见。谢谢! 最佳答案 我喜欢InstantRails,非常容易使用,无需安装程序,也不会修改您的系统环境。 关于ruby-on-rails-可移植RubyonRails环境,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/q
在我的双语Rails4应用程序中,我有一个像这样的LocalesController:classLocalesController用户可以通过此表单更改其语言环境:deflocale_switcherform_tagurl_for(:controller=>'locales',:action=>'change_locale'),:method=>'get',:id=>'locale_switcher'doselect_tag'set_locale',options_for_select(LANGUAGES,I18n.locale.to_s)end这有效。但是,目前用户无法通过URL更改
我在跑Fastlane(适用于iOS的持续构建工具)以执行用于解密文件的自定义shell脚本。这是命令。sh"./decrypt.shENV['ENCRYPTION_P12']"我想不出将环境变量传递给该脚本的方法。显然,如果我将密码硬编码到脚本中,它就可以正常工作。sh"./decrypt.shmypwd"有什么建议吗? 最佳答案 从直接Shell中扩展假设这里的sh是一个faSTLane命令,它以给定的参数作为脚本文本调用shell命令:#asafastlanedirectivesh'./decrypt.sh"$ENCRYPTI
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3