注:以下相机内参与外参介绍除来自网络整理外全部来自于《视觉SLAM十四讲从理论到实践 第2版》中的第5讲:相机与图像,为了方便查看,我将每节合并到了一幅图像中
相机与摄像机区别:相机着重于拍摄静态图像,光学变焦不大;摄像机着重于拍摄动态视频,光学变焦比较大。
相机的传感器(CCD, 光学镜头)是有许多像素点按照矩阵的形式排列而成,分辨率就是以水平方向和垂直方向的像素来表示的。分辨率越高,成像后的图像像素数就越高,图像就越清晰。传感器尺寸越大,一定程度上表示相机可容纳像素个数越多,成像的画幅越大。
像元尺寸:就是每个像素的面积。单个像素面积小,单位面积内的像素数量多,相机的分辨率高。
像素深度:是指每个像素用多少比特位表示。通常,每个像素的比特位数多,表达图像细节的能力强,这个像素的颜色值更加丰富、分的更细,颜色深度就更深。一般像素深度有1位、8位、16位、24位和32位。
曝光:指在摄影过程中进入镜头照射在感光元件上的光量。曝光时间:传感器将光信号转换为电信号形成一帧图像,每个像元接受光信号的过程叫曝光,所花费的时间叫曝光时间,也叫快门速度。曝光补偿:是一种曝光控制方式,如果环境光源偏暗,即可增加曝光值以突显画面的清晰度。曝光补偿就是有意识地变更相机自动演算出的"合适"曝光参数,让照片更明亮或者更昏暗的拍摄手法。
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。求解相机参数的过程称为相机标定。
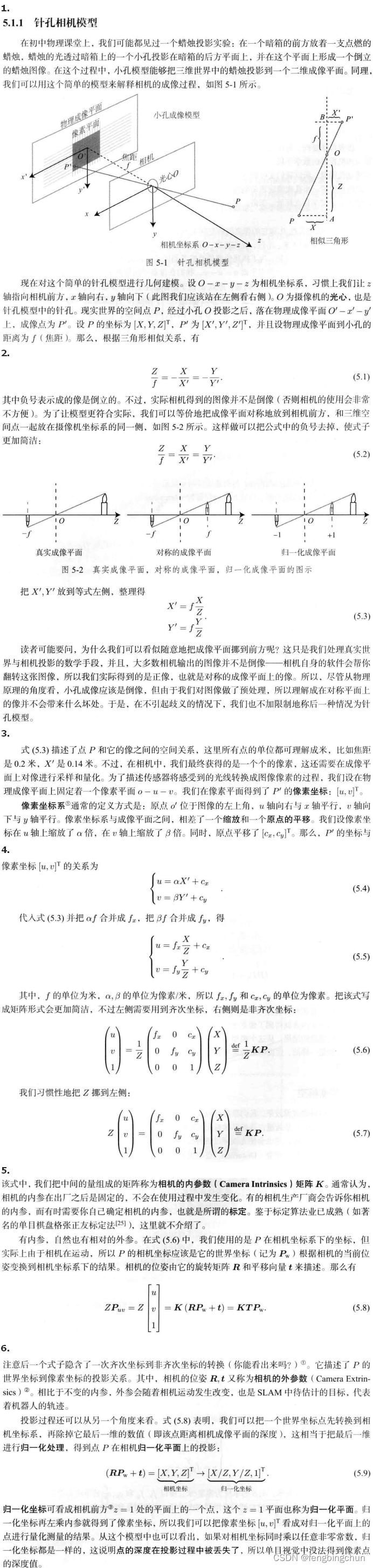
三维世界中的一个物体反射或发出的光线,穿过相机光心后,投影在相机的成像平面上。相机的感光器件接收到光线后,产生测量值,就得到了像素,形成了我们见到的照片。
相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程能够用一个几何模型进行描述。这个模型有很多种,其中最简单的称为针孔模型。针孔模型是很常用而且有效的模型,它描述了一束光线通过针孔之后,在针孔背面投影成像的关系。同时,由于相机镜头上的透镜的存在,使得光线投影到成像平面的过程中会产生畸变。因此,我们使用针孔和畸变两个模型来描述整个投影过程。这两个模型能够把外部的三维点投影到相机内部成像平面,构成相机的内参数。
齐次坐标是将一个原本是N维的向量用一个N+1维向量来表示.
通常认为,相机的内参(Camera Intrinsics)在出厂之后是固定的,不会在使用过程中发生变化。
内参包括:焦距(fx, fy)、主点坐标(cx, cy)、畸变参数。
内参作用:把坐标从相机坐标系转换到像素坐标系中。
外参作用:把坐标从世界坐标系转换到相机坐标系中。相机外参随着世界坐标系与相机坐标系的相对位置而变。
外参:相机的旋转、平移(相机的位姿由它的旋转矩阵R和平移向量t来描述),用于描述在静态场景下相机的运动,或者在相机固定时,运动物体的刚性运动。相比于不变的内参,外参会随着相机运动发生改变。旋转矩阵R为3*3,平移向量t为3*1; R,t组合成3*4的矩阵。
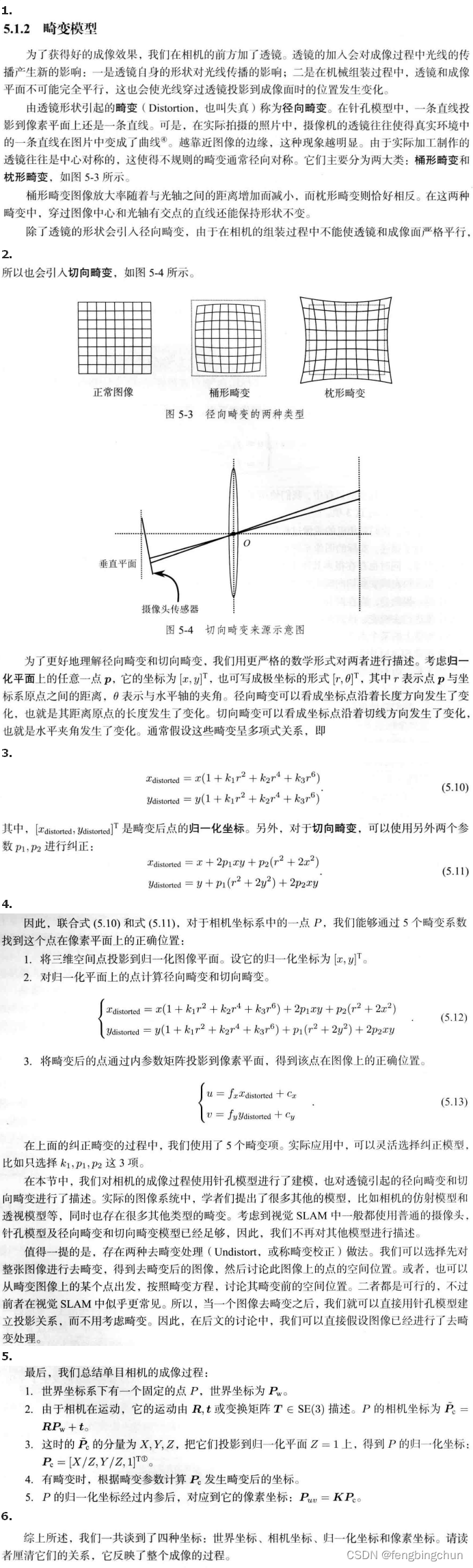
由透镜形状引起的畸变(Distortion, 也叫失真)称为径向畸变,参数包括:k1, k2, k3;
由于透镜和成像面不能严格平行,会引入切向畸变,参数包括:p1, p2;
相机成像过程涉及到四个坐标系的转换:世界坐标系、相机坐标系、图像坐标系(归一化坐标系)、像素坐标系。
在instant-ngp中可通过colmap2nerf.py求相机的内参和外参,运算后生成的transforms.json部分内容如下:
{
"camera_angle_x": 0.6797143901096673,
"camera_angle_y": 0.6796103976473696,
"fl_x": 1131.2978259257525,
"fl_y": 1131.4850184079994,
"k1": 0.010915222368470609,
"k2": -0.9233170001378709,
"k3": 0,
"k4": 0,
"p1": 0.011664713007717898,
"p2": -0.004849750483773029,
"is_fisheye": false,
"cx": 445.86115401855534,
"cy": 382.96655347583277,
"w": 800.0,
"h": 800.0,
"aabb_scale": 4,
"frames": [
{
"file_path": "./train/r_16.png",
"sharpness": 695.979090625,
"transform_matrix": [
[
-0.6656617785641908,
0.007151776858681357,
0.7462193033207263,
2.8758118623856377
],
[
0.7251107079754902,
-0.23014046936711052,
0.6490376148874708,
2.7371395609739637
],
[
0.17637703291159618,
0.9731311404169232,
0.14800988417722724,
0.6687713985786954
],
[
0.0,
0.0,
0.0,
1.0
]
]
},
{
"file_path": "./train/r_23.png", 其中:
(1).camera_angle_x, camera_angle_y: 水平、垂直视角;镜头的焦距决定了视角的大小;在colmap2nerf.py中,由焦距求视角的公式为:
camera_angle_x = math.atan(w / (fl_x * 2)) * 2
camera_angle_y = math.atan(h / (fl_y * 2)) * 2(2).fl_x, fl_y: 焦距,若没有给出可通过水平或垂直视角计算出,在nerf_loader.cu中的公式为:
fl_x = 0.5f * (float)w / tanf(0.5f * camera_angle_x);
fl_y = 0.5f * (float)h / tanf(0.5f * camera_angle_y); (3).k1,k2,k3,k4: 径向畸变参数;
(4).p1,p2: 切向畸变参数;
(5).is_fisheye: 是否是鱼眼相机模型;
(6).cx,cy: 主点坐标;
(7).w,h: 分辨率,图像宽、高;
(8).aabb_scale: 对于在单元立方体(unit cube)外部有可见背景的自然场景,有必要将参数aabb_scale设置为2的幂,最大为128;
(9).transform_matrix: 外参.
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
📢博客主页:https://blog.csdn.net/weixin_43197380📢欢迎点赞👍收藏⭐留言📝如有错误敬请指正!📢本文由Loewen丶原创,首发于CSDN,转载注明出处🙉📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨文章预览:一.分辨率(Resolution)1、工业相机的分辨率是如何定义的?2、工业相机的分辨率是如何选择的?二.精度(Accuracy)1、像素精度(PixelAccuracy)2、定位精度和重复定位精度(RepeatPrecision)三.公差(Tolerance)四.课后作业(Post-ClassExercises)视觉行业的初学者,甚至是做了1~2年
目录H2数据库入门以及实际开发时的使用1.H2数据库的初识1.1H2数据库介绍1.2为什么要使用嵌入式数据库?1.3嵌入式数据库对比1.3.1性能对比1.4技术选型思考2.H2数据库实战2.1H2数据库下载搭建以及部署2.1.1H2数据库的下载2.1.2数据库启动2.1.2.1windows系统可以在bin目录下执行h2.bat2.1.2.2同理可以通过cmd直接使用命令进行启动:2.1.2.3启动后控制台页面:2.1.3spring整合H2数据库2.1.3.1引入依赖文件2.1.4数据库通过file模式实际保存数据的位置2.2H2数据库操作2.2.1Mysql兼容模式2.2.2Mysql模式
在本文中,我们将探讨摄影机的外参,并通过Python中的一个实践示例来加强我们的理解。相机外参摄像头可以位于世界任何地方,并且可以指向任何方向。我们想从摄像机的角度来观察世界上的物体,这种从世界坐标系到摄像机坐标系的转换被称为摄像机外参。那么,我们怎样才能找到相机外参呢?一旦我们弄清楚相机是如何变换的,我们就可以找到从世界坐标系到相机坐标系的基变换的变化。我们将详细探讨这个想法。具体来说,我们需要知道相机是如何定位的,以及它在世界空间中的位置,有两种转换可以帮助我们:有助于确定摄影机方向的旋转变换。有助于移动相机的平移变换。让我们详细看看每一个。旋转通过旋转改变坐标让我们看一下将点旋转一个角度
为什么需要服务网关传统的单体架构中只需要开放一个服务给客户端调用,但是微服务架构中是将一个系统拆分成多个微服务,如果没有网关,客户端只能在本地记录每个微服务的调用地址,当需要调用的微服务数量很多时,它需要了解每个服务的接口,这个工作量很大。有了网关之后,网关作为系统的唯一流量入口,封装内部系统的架构,所有请求都先经过网关,由网关将请求路由到合适的微服务。使用网关的好处1)简化客户端的工作。网关将微服务封装起来后,客户端只需同网关交互,而不必调用各个不同服务;(2)降低函数间的耦合度。一旦服务接口修改,只需修改网关的路由策略,不必修改每个调用该函数的客户端,从而减少了程序间的耦合性(3)解放开发
俯拍相机中心和吸嘴中心的标定文章目录俯拍相机中心和吸嘴中心的标定前言适用模型如下:一、使用一个标定片进行标定1.关键注意:2.标定步骤:二、使用一个L型的工件1.关键注意:2.标定步骤:总结前言在自动化设备领域,使用相机进行定位是很普遍存在的,而使用相机定位就必定会用到标定,本文介绍两种关于吸嘴上方的俯拍相机和吸嘴中心的标定方法(前提是带有仰拍相机和俯拍相机)。【还有很多相机的使用场景的标定方法将在以后的文章中进行阐述】适用模型如下:一、使用一个标定片进行标定1.关键注意:关键是使用两个相机的中心和识别偏差,得到两个相机的中心固定偏差。注:后续俯拍相机拍物料识别得到的偏差以吸嘴中心在俯拍相机中
相机内参标定,相机和激光雷达联合标定一、相机标定原理1.1成像过程1.2标定详解二、相机和激光雷达联合标定2.1标定方法汇总2.2Autoware的安装与运行2.2.1安装方式2.2.2安装Autoware的依赖(Ubuntu16.04/kinetic)2.2.3编译Autoware1.创造工作空间2.下载Autoware源码3.其他依赖4.编译5.效果2.3Autoware标定激光雷达和相机的外参过程一、相机标定原理1.1成像过程现实物体在相机中的成像过程离不开世界坐标系、相机坐标系、图像坐标系以及像素坐标系,只有理解了这些才能对获取的图像进行准确的分析。成像过程:四个坐标系如下图所示:世界
我发现python的细节自动完成很好RubyonRails有类似的方法描述吗? 最佳答案 有篇不错的文章"UsingVIMasacompleteRubyonRailsIDE"其中引用rails.vim.这似乎是RailsforVIM的实际标准。(不过,我还没有使用过它,但很快就会尝试。)这允许你做很多与Rails相关的任务,但对自动完成没有帮助。还有一篇"RubyAutocompleteinVim"(遗憾的是不再可用)这就是您要搜索的内容。我不知道,理解Rails的所有插件魔法和元编程的东西是否足够聪明。它至少在vim的配置中提到了
防火墙防火墙分类第一代防火墙:包过滤防火墙包过滤防火墙的缺点第二代防火墙:代理防火墙第三代防火墙:状态防火墙第四代防火墙:UTM防火墙第五代防火墙:下一代防火墙华为防火墙介绍安全策略防火墙的会话表防火墙分类第一代防火墙:包过滤防火墙属于第一代防火墙技术,在没有专用防火墙设备时,一般由路由器实现该功能。将网络上传送数据包的IP首部以及TCP/UDP首部,获取发送源的IP地址和端口号,以及目的地的IP地址和端口号,并将这些信息作为过滤条件,决定是否将该分组转发至目的地网络分组过滤的执行需要设置访问控制列表。访问控制列表也可以称为安全策略(简称策略)或安全规则(简称规则)。类似于进站检票的做法,符合
内容来自Qt样式表之QSS语法介绍-3YL的博客Qt样式表是一个可以自定义部件外观的十分强大的机制,可以用来美化部件。Qt样式表的概念、术语和语法都受到了HTML的层叠样式表(CascadingStyleSheets, CSS教程)的启发,不过与CSS不同的是,Qt样式表应用于部件的世界。类型选择器QPushButton匹配QPushButton及其子类的实例ID选择器QPushButton#okButton匹配所有objectName为okButton的QPushButton实例。 CSS常用样式1CSS文字属性注:px:相对长度单位,像素(Pixel)。pt:绝对长度单位,点(Point