文章目录
这篇文章主要向大家介绍ST意法半导体的电流采集芯片INA282的外围电路搭建设计(适用于INA28x系列芯片),希望大家看了此篇文章后能有所收获,那么进入正题。
在讲解之前,先给大家推荐一个DateSheet查询网站(个人认为挺好用的)
http://www.datasheetcatalog.com/
ps:没有你查不到的,只有你不知道的
好的进入正题!
首先在那个网站里搜索INA282芯片数据手册,就会出来一大堆,这里选择的ST意法半导体的。
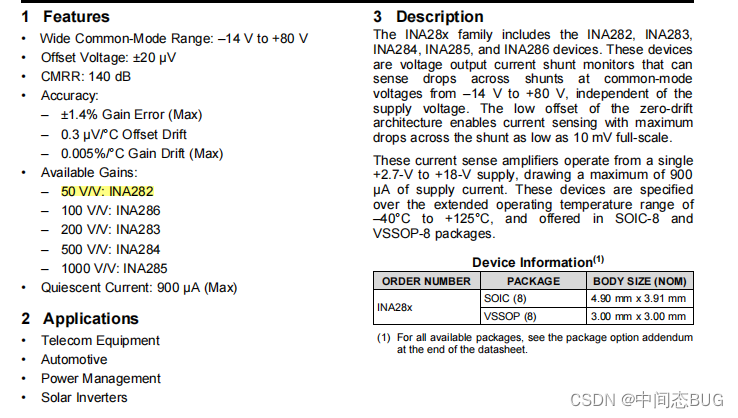
通过数据手册我们可以得知芯片电压采集增益为50V/V。知道电压增益后,后面我们就可以根据自己的需求计算出对应的采样电阻了。
接下来查询数据手册给出的芯片引脚连接图,如下:
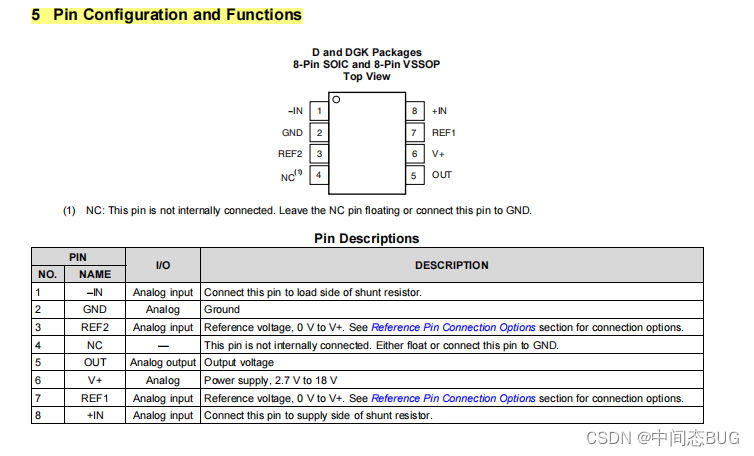
芯片手册里还讲到了REF1和REF2两个基准引脚的作用,当REF1和REF2同时接地时,此时芯片输出脚电压Vout=I*R*50;当REF1于REF2任意一个引脚接地,一个引脚接VCC时,Vout=I*R*50+1/2*VCC,其中50为INA282芯片电压采集增益。下图根据DateSheet搭建了INA282的外围电路,其中REF引脚一个接VCC 3.3V,另一个接GND:
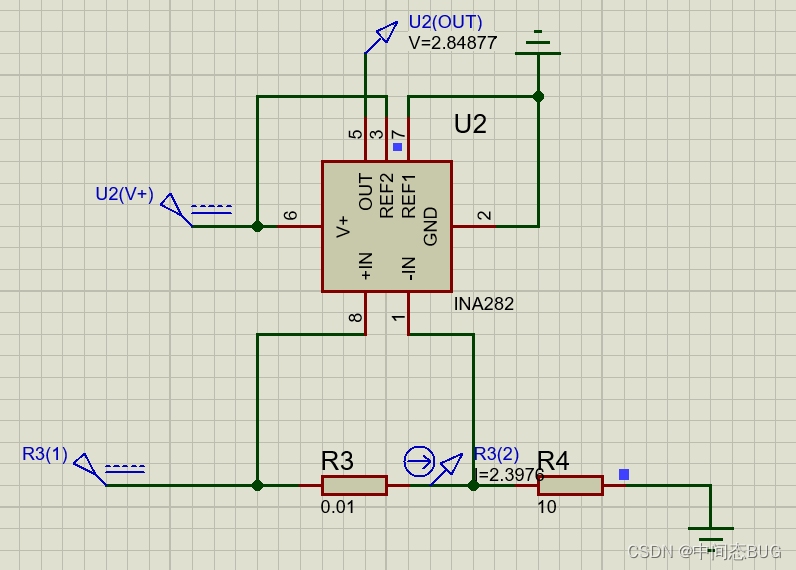
这里采样电阻我使用了0.01R,根据图中可知采集的支路电流为2.3976A,根据公式Vout=I*R*50+1/2*VCC计算得到Vout=2.3976*0.01*50+0.5*3.3=2.8488,根据仿真图中电压探针显示验证了公式的正确性。
我们可以根据公式选择合适的采样电阻来获得相应的电流值,当然在实际电路应用中,一般我们会使用单片机的ADC端口来采集Vout,但是由于一般单片机ADC电压采集范围为0-3.3V,因此我们就需要根据单片机的电压采集范围来选择合适的采样电阻以获得符合自己需求的电流采集范围,且在芯片电压输出端口Vout一般都带有很多噪声,我们若使用单片机来采集Vout就需要设计滤波电路来过滤噪声,以此来增加电流采集的精度。
当然上图只是给出了一种简单的电流采集电路,在实际电路应用中,还要考虑各种噪声的干扰,而且在实际电路应用中,不管是手焊电路还是画PCB,由于采样电阻的阻值很小,芯片两端采样电阻的阻值会受很多干扰,如焊盘锡膏的量亦或PCB走线中的线长和线宽都对芯片采样两端的阻值有影响,因此在实际电流采集中,还是得根据不同的走线环境测量出精确的阻抗,才能够较精准的采集到电流的值。最后,文章若有错误的地方,欢迎大家在评论区对笔者指出更正。
一、概述在之前的一篇博文中,记录了AT24C01、AT24C02芯片的读写驱动,先将之前的相关文章include一下:1.IIC驱动:4位数码管显示模块TM1637芯片C语言驱动程序2.AT24C01/AT24C02读写:AT24C01/AT24C02系列EEPROM芯片单片机读写驱动程序本文记录分享AT24C04、AT24C08、AT24C16芯片的单片机C语言读写驱动程序。二、芯片对比介绍型号容量bit容量byte页数字节/页器件寻址位可寻址器件数WordAddress位数/字节数备注AT24C044k5123216A2A149/1WordAddress使用P0位AT24C088k1024
汽车芯片赛道的「卷」,或许超出了所有人的预期。对于单纯TOPS算力的比拼,已经翻篇,如何让车企有的用,用得上,还要用得好,已经是新风向。实际上,在汽车智能化刚刚开始的2018年,彼时类似斑马智行这样的车机系统仅仅是从软件层面改变传统座舱的人机交互体验(从功能机到智能机)。而类似Mobileye这样的ADAS视觉感知系统方案(EyeQ5之前),也仅仅是辅助驾驶的入门级。在高工智能汽车研究院看来,汽车芯片赛道经历了几个发展周期,1.0时代(以2020年上车的高通8155为代表),智能座舱进入硬件变革节点;2.0时代(以2021年上车的英伟达Orin为代表),智能驾驶进入硬件变革节点。而3.0时代,
目录l298n模块详解l298n芯片简介 在嵌入式领域中l298n属于最常用的电机驱动模块,该模块稳定,耐用,操作简单备受广大电子爱好者的喜爱,今天小编结合自己开发的经验来给初学者门聊聊如何使用这款模块及芯片的用法l298n模块详解如图所示,模块左右两侧的2P的端子是接入电机的,左右两端分别可以接入一个直流电机。由于直流电机不分正负所以怎样接都是可以的。中间3P的端子分别接12V,GND,5V。黑色排针部分左右两端的跳帽插上代表使能,l298n有两个通道,所以有两个使能跳帽。中间的四个排针是逻辑输入,左边两个为一组,右边两个为另一组,真值表如下图所示下图附带了l298n模块的原理图,想自己di
随着人工智能领域不断取得突破性进展。作为实现人工智能技术的重要基石,AI芯片拥有巨大的产业价值和战略地位。作为人工智能产业链的关键环节和硬件基础,AI芯片有着极高的技术研发和创新的壁垒。从芯片发展的趋势来看,现在仍处于AI芯片发展的初级阶段。未来将是AI芯片发展的重要阶段,无论是架构还是设计理念都存在着巨大的创新空间。一、芯片的发展历史1956年达特茅斯会议上,科学家约翰·麦卡锡,克劳德·香农和马文·明斯基提出了"人工智能"一词。50年代末,阿瑟·萨缪尔(ArthurSamuel)提出了"机器学习"这个术语,他开发了一个西洋跳棋程序,可以从错误中吸取教训,经过学习后,甚至比编写程序的人棋力更强
平升电子电池供电遥测终端RTU/遥测终端机/低功耗遥测采集终端是基于4G、5G、NB-IoT网络实现数据采集、远程传输、分析计算、越限报警的智能设备,具有功耗低、IP68防水等特点。特别适合用在无供电条件、防水防尘要求高的监测现场。随着通信网络更迭、产品持续改进,平升电子电池供电遥测终端RTU自2007年问世至今,已经拥有了4款系列产品,可应用于多种场合:管网监测、地下水监测、无线远程抄表、水资源取用水计量监测、油田长停井监测等。功能特点 ★ 远程监测仪表/传感器数据 ★ 4G/5G/NB-IoT无线远传 ★ 数据越限、设备异常自动报警,及时发现事故隐患 ★ IP68级防护——防水防潮
你可以通过点击选择md-chips中的md-chip元素,但是我还没有找到一个很好的方法来找出哪个被选中在Controller中。有没有人完成过这个?{{$chip}}(fruit)http://codepen.io/anon/pen/QbOaLz 最佳答案 使用md-on-select:选择芯片时将调用的表达式。...在你的Controller中$scope.getChipInfo=function(chip_info){console.log(chip_info);} 关于javas
我想做的是创建一个应用程序,当任何人点击map对象时,每次点击时两个字段都会填充纬度和经度。是否有执行类似操作的GoogleMapsV3JavaScriptAPI(地理编码API)示例代码? 最佳答案 您可以使用google.maps.event'实现此目的经纬度属性:像这样的东西会展示它是如何工作的。这是一个JSFiddleDemo:google.maps.event.addListener(map,'click',function(event){alert('Lat:'+event.latLng.lat()+'Lng:'+eve
1基础1.1概述RK809是一款高性能PMIC,RK809集成5个大电流DCDC、9个LDO、2个开关SWITCH、1个RTC、1个高性能CODEC、可调上电时序等功能。系统中各路电源总体分为两种:DCDC和LDO。两种电源的总体特性如下(详细资料请自行搜索):DCDC:输入输出压差大时,效率高,但是存在纹波比较大的问题,成本高,所以大压差,大电流负载时使用。一般有两种工作模式。PWM模式:纹波瞬态响应好,效率低;PFM模式:效率高,但是负载能力差。LDO:输入输出压差大时,效率低,成本低,为了提高LDO的转换效率,系统上会进行相关优化如:LDO输出电压为1.1V,为了提高效率,其输入电压可以
目录1、前言2、Xilinx官方主推的MIPI解码方案3、我已有的MIPI解码方案4、纯Vhdl代码解码MIPI5、vivado工程介绍6、上板调试验证7、福利:工程代码的获取1、前言FPGA图像采集领域目前协议最复杂、技术难度最高的应该就是MIPI协议了,MIPI解码难度之高,令无数英雄竞折腰,以至于Xilinx官方不得不推出专用的IP核供开发者使用,不然太高端的操作直接吓退一大批FPGA开发者,就没人玩儿了。本文详细描述了设计方案,工程代码编译通过后上板调试验证,可直接项目移植,适用于在校学生做毕业设计、研究生项目开发,也适用于在职工程师做项目开发,可应用于医疗、军工等行业的数字成像和图像
COI实验室技能:python控制相机的方法——采集、处理、显示、实时 本文介绍如何利用python控制办公摄像头、工业相机和科研相机。将数据采集和处理统一到python代码中。 主要围绕解决采用什么库、掌握这个库的控制相机方法(参数配置、读取数据等等)、结合自己的算法进行处理、保存显示结果。 基本流程:导入相关的库->读取图片的方法->处理数据->结果保存、显示等等。目录1.python控制办公摄像头2.python控制工业相机的例子2.1环境配置2.2控制pointgray相机3.python控制科研相机4.实时监测系统的实现预备内容:●掌握python语言以及安装加载包的方法(cv