YOLOv5的损失主要由三个部分组成:
针对三个预测特征层(P3, P4, P5)上的obj损失采用不同的权重。在源码中,针对预测小目标的预测特征层(P3)采用的权重是4.0,针对预测中等目标的预测特征层(P4)采用的权重是1.0,针对预测大目标的预测特征层(P5)采用的权重是0.4。
self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7
lobj += obji * self.balance[i] # obj loss详情见YOLOv5网络详解
原来边界框计算公式:
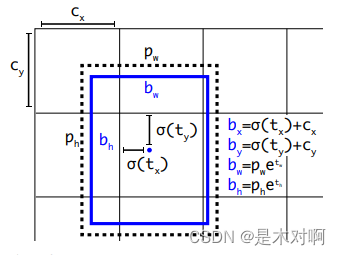
tx,ty为网络预测的目标中心点距离栅格左上点的偏移量,σ为sigmoid函数,将预测的偏移量限制在0到1之间,即预测的中心点不会超出对应的栅格区域。
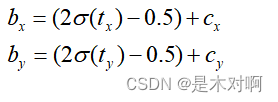
YOLOv5作者将偏移的范围由原来的( 0 , 1 )调整到了( − 0.5 , 1.5 ):
目标宽高的计算公式调整为:
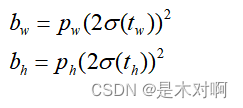
调整后倍率因子被限制在( 0 , 4 ) 之间,对预测目标的宽高做了限制。
pxy = ps[:, :2].sigmoid() * 2. - 0.5
pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box①:根据GT Box与对应的Anchor Templates模板的高宽比例(0.25~4)进行匹配。
②:栅格左上角点距离GT中心点在( − 0.5 , 1.5 ) 范围,它们对应的Anchor都能回归到GT的位置,这样会让正样本的数量得到大量的扩充。
损失函数的代码注释,主要参考:
class ComputeLoss:
# Compute losses
def __init__(self, model, autobalance=False):
super(ComputeLoss, self).__init__()
self.sort_obj_iou = False # 筛选置信度损失的时候是否先对iou排序
device = next(model.parameters()).device # get model device
h = model.hyp # hyperparameters
# Define criteria:Binary Cross Entropy
BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device)) # 分类损失
BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device)) # 置信度损失
# Class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
self.cp, self.cn = smooth_BCE(eps=h.get('label_smoothing', 0.0)) # positive, negative BCE targets 1, 0
# Focal loss
g = h['fl_gamma'] # focal loss gamma = 0
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
# det: 返回的是模型的检测头 Detector 3个 分别对应产生三个输出feature map
det = model.module.model[-1] if is_parallel(model) else model.model[-1] # Detect() module
self.balance = {3: [4.0, 1.0, 0.4]}.get(det.nl, [4.0, 1.0, 0.25, 0.06, .02]) # P3-P7 预测特征层的置信度损失系数
self.ssi = list(det.stride).index(16) if autobalance else 0 # stride 16 index # 0
self.BCEcls, self.BCEobj, self.gr, self.hyp, self.autobalance = BCEcls, BCEobj, 1.0, h, autobalance
for k in 'na', 'nc', 'nl', 'anchors':
setattr(self, k, getattr(det, k)) # 讲det的k属性赋值给self.k属性
def __call__(self, p, targets): # predictions, targets, model
device = targets.device
# 初始化lcls, lbox, lobj三种损失值 tensor([0.])
lcls, lbox, lobj = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
tcls, tbox, indices, anchors = self.build_targets(p, targets) # targets # 参考build_targets函数
# Losses # 依次遍历三个feature map的预测输出pi
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros_like(pi[..., 0], device=device) # target obj # 初始化target置信度(先全是负样本 后面再筛选正样本赋值)
n = b.shape[0] # number of targets
if n:
# 精确得到b图片,a anchor,grid_cell(gi, gj)对应的预测值
# 用这个预测值与我们筛选的这个grid_cell的真实框进行预测(计算损失)
ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
# Regression
pxy = ps[:, :2].sigmoid() * 2. - 0.5
pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
# 这里的tbox[i]中的xy是这个target对当前grid_cell左上角的偏移量[0,1] 而pbox.T是一个归一化的值
iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss 定位损失
# Objectness
# iou.detach() 不会更新iou梯度 iou并不是反向传播的参数 所以不需要反向传播梯度信息
score_iou = iou.detach().clamp(0).type(tobj.dtype)
if self.sort_obj_iou:
sort_id = torch.argsort(score_iou)
b, a, gj, gi, score_iou = b[sort_id], a[sort_id], gj[sort_id], gi[sort_id], score_iou[sort_id]
# self.gr是iou ratio [0, 1] self.gr越大,置信度越接近iou self.gr越小,置信度越接近1(人为加大训练难度)
tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * score_iou # iou ratio
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(ps[:, 5:], self.cn, device=device) # targets
t[range(n), tcls[i]] = self.cp # 筛选到的正样本对应位置值是cp 1
lcls += self.BCEcls(ps[:, 5:], t) # BCE 分类损失
# Append targets to text file
# with open('targets.txt', 'a') as file:
# [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
# 置信度损失是用所有样本(正样本 + 负样本)一起计算损失的
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss 置信度损失
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp['box']
lobj *= self.hyp['obj']
lcls *= self.hyp['cls']
bs = tobj.shape[0] # batch size
return (lbox + lobj + lcls) * bs, torch.cat((lbox, lobj, lcls)).detach()
def build_targets(self, p, targets):
# Build targets for compute_loss(), input targets(image,class,x,y,w,h)
"""
Build targets for compute_loss()
params p: p[i]的作用只是得到每个feature map的shape
预测框由模型构建中的三个检测头Detector返回的三个yolo层的输出
tensor格式list列表 存放三个tensor 对应的是三个yolo层的输出
如: [4, 3, 80, 80, 7]、[4, 3, 40, 40, 7]、[40, 3, 20, 20, 7]
[bs, anchor_num, grid_h, grid_w, xywh+class置信度+classes某一类别对应概率]
可以看出来这里的预测值p是三个yolo层每个grid_cell(每个grid_cell有三个预测值)的预测值,后面肯定要进行正样本筛选
params targets: 数据增强后的真实框 [2, 6] [num_target, image_index+class+xywh] xywh为归一化后的框
return tcls: 表示这个target所属的class index
tbox: xywh 其中xy为这个target对当前grid_cell左上角的偏移量
indices: b: 表示这个target属于的image index
a: 表示这个target使用的anchor index
gj: 经过筛选后确定某个target在某个网格中进行预测(计算损失) gj表示这个网格的左上角y坐标
gi: 表示这个网格的左上角x坐标
anch: 表示这个target所使用anchor的尺度(相对于这个feature map) 注意可能一个target会使用大小不同anchor进行计算
"""
#此处为自己设置的targets
# target = torch.tensor([[0.00000, 1.00000, 0.54517, 0.33744, 0.06395, 0.02632],
# [1.00000, 0.00000, 0.96964, 0.42483, 0.06071, 0.05264]])
na, nt = self.na, targets.shape[0] # number of anchors 3, targets 我们这里设为2进行debug,如上
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(7, device=targets.device) # normalized to gridspace gain tensor([1., 1., 1., 1., 1., 1., 1.])
ai = torch.arange(na, device=targets.device).float().view(na, 1).repeat(1, nt) # same as .repeat_interleave(nt)
# tensor([[0., 0.],
# [1., 1.],
# [2., 2.]])
# 一个特征图对应3个anchor, 将target复制3份并在后面添加anchor索引,表示当前target对应哪个anchor
targets = torch.cat((targets.repeat(na, 1, 1), ai[:, :, None]), 2) # append anchor indices
# targets: tensor([[[0.0000, 1.0000, 0.5452, 0.3374, 0.0640, 0.0263, 0.0000],
# [1.0000, 0.0000, 0.9696, 0.4248, 0.0607, 0.0526, 0.0000]],
# [[0.0000, 1.0000, 0.5452, 0.3374, 0.0640, 0.0263, 1.0000],
# [1.0000, 0.0000, 0.9696, 0.4248, 0.0607, 0.0526, 1.0000]],
# [[0.0000, 1.0000, 0.5452, 0.3374, 0.0640, 0.0263, 2.0000],
# [1.0000, 0.0000, 0.9696, 0.4248, 0.0607, 0.0526, 2.0000]]])
g = 0.5 # bias
off = torch.tensor([[0, 0],
[1, 0], [0, 1], [-1, 0], [0, -1], # j,k,l,m
# [1, 1], [1, -1], [-1, 1], [-1, -1], # jk,jm,lk,lm
], device=targets.device).float() * g # offsets
# tensor([[ 0.0000, 0.0000],
# [ 0.5000, 0.0000],
# [ 0.0000, 0.5000],
# [-0.5000, 0.0000],
# [ 0.0000, -0.5000]])
# 遍历三个feature map,为target筛选anchor正样本
for i in range(self.nl): # self.nl: number of detection layers Detect的个数 = 3
anchors = self.anchors[i]
# 假设anchors = torch.tensor([[1.25000, 1.62500], anchor1
# [2.00000, 3.75000], anchor2
# [4.12500, 2.87500]]) anchor3
gain[2:6] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
# gain = torch.tensor([ 1., 1., 20., 20., 20., 20., 1.]) 假设现在是在20*20大小的特征图上进行预测
# Match targets to anchors
t = targets * gain #将target中的xywh归一化尺度放大到当前feature map的坐标尺度, x,y,w,h都乘以20
if nt:
# Matches
r = t[:, :, 4:6] / anchors[:, None] # wh ratio
# r: tensor([[[1.0232, 0.3239], target0与anchor0的宽高比 1.0232=target0的宽度/anchor0的宽度
# [0.9714, 0.6479]], target1与anchor0的宽高比
# [[0.6395, 0.1404], target0与anchor1的宽高比
# [0.6071, 0.2807]], target1与anchor1的宽高比
# [[0.3101, 0.1831], target0与anchor2的宽高比
# [0.2944, 0.3662]]]) target1与anchor2的宽高比
j = torch.max(r, 1. / r).max(2)[0] < self.hyp['anchor_t'] # compare 宽度和高度方向差异最大的值与设定值的比较
# tensor([[ True, True], 第一个True表示target0与anchor0最大的宽高比<设定值 第一个True表示target1与anchor0最大的宽高比<设定值
# [False, True],
# [False, True]])
# 最后的结果target0分给anchor0,target1分给anchor0,anchor1,anchor2
t = t[j] # filter
# t: tensor([[ 0.0000, 1.0000, 10.9034, 6.7488, 1.2790, 0.5264, 0.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 0.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 1.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 2.0000]])
# Offsets
gxy = t[:, 2:4] # grid xy # 相对feature map左上角的目标
gxi = gain[[2, 3]] - gxy # inverse # 相对feature map右下角的目标
j, k = ((gxy % 1. < g) & (gxy > 1.)).T # 如gxy%1<0.5,就表示其小数部分<0.5,则更靠近左上,并且忽略第一行和第一列的格子
l, m = ((gxi % 1. < g) & (gxi > 1.)).T # 如gxi%1<0.5,就表示gxy的小数部分>0.5,靠近右下,并忽略最后一行和最后一列的格子
j = torch.stack((torch.ones_like(j), j, k, l, m))
# tensor([[ True, True, True, True],
# [False, True, True, True], j如果是True表示当前target中心点所在的格子的左边格子也对该target进行回归(后续进行计算损失)
# [False, True, True, True], k如果是True表示当前target中心点所在的格子的上边格子也对该target进行回归(后续进行计算损失)
# [ True, False, False, False], l如果是True表示当前target中心点所在的格子的右边格子也对该target进行回归(后续进行计算损失)
# [ True, False, False, False]]) m如果是True表示当前target中心点所在的格子的右边格子也对该target进行回归(后续进行计算损失)
t = t.repeat((5, 1, 1))[j]
# t: tensor([[ 0.0000, 1.0000, 10.9034, 6.7488, 1.2790, 0.5264, 0.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 0.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 1.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 2.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 0.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 1.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 2.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 0.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 1.0000],
# [ 1.0000, 0.0000, 19.3928, 8.4966, 1.2142, 1.0528, 2.0000],
# [ 0.0000, 1.0000, 10.9034, 6.7488, 1.2790, 0.5264, 0.0000],
# [ 0.0000, 1.0000, 10.9034, 6.7488, 1.2790, 0.5264, 0.0000]])
'''
对t复制5份,即本身点外加上下左右四个候选区共五个区域,选出三份
具体选出哪三份由torch.stack后的j决定,第一项是torch.ones_like,即全1矩阵,说明本身是必选中状态的。
剩下的4项中,由于是inverse操作,所以j和l,k和m是两两互斥的。
'''
offsets = (torch.zeros_like(gxy)[None] + off[:, None])[j]
# offsets tensor([[ 0.0000, 0.0000],
# [ 0.0000, 0.0000],
# [ 0.0000, 0.0000],
# [ 0.0000, 0.0000],
# [ 0.5000, 0.0000],
# [ 0.5000, 0.0000],
# [ 0.5000, 0.0000],
# [ 0.0000, 0.5000],
# [ 0.0000, 0.5000],
# [ 0.0000, 0.5000],
# [-0.5000, 0.0000],
# [ 0.0000, -0.5000]])
else:
t = targets[0]
offsets = 0
# Define
b, c = t[:, :2].long().T # image, class
gxy = t[:, 2:4] # grid xy
gwh = t[:, 4:6] # grid wh
gij = (gxy - offsets).long()
gi, gj = gij.T # grid xy indices
# Append
a = t[:, 6].long() # anchor indices
indices.append((b, a, gj.clamp_(0, gain[3] - 1), gi.clamp_(0, gain[2] - 1))) # image, anchor, grid indices gj: 网格的左上角y坐标 gi: 网格的左上角x坐标
tbox.append(torch.cat((gxy - gij, gwh), 1)) # box:xywh,其中xy为这个target对当前grid_cell左上角的偏移量,0~1之间
anch.append(anchors[a]) # anchors
tcls.append(c) # class
return tcls, tbox, indices, anch
为了将Cucumber用于命令行脚本,我按照提供的说明安装了arubagem。它在我的Gemfile中,我可以验证是否安装了正确的版本并且我已经包含了require'aruba/cucumber'在'features/env.rb'中为了确保它能正常工作,我写了以下场景:@announceScenario:Testingcucumber/arubaGivenablankslateThentheoutputfrom"ls-la"shouldcontain"drw"假设事情应该失败。它确实失败了,但失败的原因是错误的:@announceScenario:Testingcucumber/ar
我正在使用puppet为ruby程序提供一组常量。我需要提供一组主机名,我的程序将对其进行迭代。在我之前使用的bash脚本中,我只是将它作为一个puppet变量hosts=>"host1,host2"我将其提供给bash脚本作为HOSTS=显然这对ruby不太适用——我需要它的格式hosts=["host1","host2"]自从phosts和putsmy_array.inspect提供输出["host1","host2"]我希望使用其中之一。不幸的是,我终其一生都无法弄清楚如何让它发挥作用。我尝试了以下各项:我发现某处他们指出我需要在函数调用前放置“function_”……这
我想在一个没有Sass引擎的类中使用Sass颜色函数。我已经在项目中使用了sassgem,所以我认为搭载会像以下一样简单:classRectangleincludeSass::Script::FunctionsdefcolorSass::Script::Color.new([0x82,0x39,0x06])enddefrender#hamlengineexecutedwithcontextofself#sothatwithintemlateicouldcall#%stop{offset:'0%',stop:{color:lighten(color)}}endend更新:参见上面的#re
这是一道面试题,我没有答对,但还是很好奇怎么解。你有N个人的大家庭,分别是1,2,3,...,N岁。你想给你的大家庭拍张照片。所有的家庭成员都排成一排。“我是家里的friend,建议家庭成员安排如下:”1岁的家庭成员坐在这一排的最左边。每两个坐在一起的家庭成员的年龄相差不得超过2岁。输入:整数N,1≤N≤55。输出:摄影师可以拍摄的照片数量。示例->输入:4,输出:4符合条件的数组:[1,2,3,4][1,2,4,3][1,3,2,4][1,3,4,2]另一个例子:输入:5输出:6符合条件的数组:[1,2,3,4,5][1,2,3,5,4][1,2,4,3,5][1,2,4,5,3][
我正在尝试用ruby中的gsub函数替换字符串中的某些单词,但有时效果很好,在某些情况下会出现此错误?这种格式有什么问题吗NoMethodError(undefinedmethod`gsub!'fornil:NilClass):模型.rbclassTest"replacethisID1",WAY=>"replacethisID2andID3",DELTA=>"replacethisID4"}end另一个模型.rbclassCheck 最佳答案 啊,我找到了!gsub!是一个非常奇怪的方法。首先,它替换了字符串,所以它实际上修改了
我有一些代码在几个不同的位置之一运行:作为具有调试输出的命令行工具,作为不接受任何输出的更大程序的一部分,以及在Rails环境中。有时我需要根据代码的位置对代码进行细微的更改,我意识到以下样式似乎可行:print"Testingnestedfunctionsdefined\n"CLI=trueifCLIdeftest_printprint"CommandLineVersion\n"endelsedeftest_printprint"ReleaseVersion\n"endendtest_print()这导致:TestingnestedfunctionsdefinedCommandLin
我想使用spawn(针对多个并发子进程)在Ruby中执行一个外部进程,并将标准输出或标准错误收集到一个字符串中,其方式类似于使用Python的子进程Popen.communicate()可以完成的操作。我尝试将:out/:err重定向到一个新的StringIO对象,但这会生成一个ArgumentError,并且临时重新定义$stdxxx会混淆子进程的输出。 最佳答案 如果你不喜欢popen,这是我的方法:r,w=IO.pipepid=Process.spawn(command,:out=>w,:err=>[:child,:out])
如何在Ruby中按名称传递函数?(我使用Ruby才几个小时,所以我还在想办法。)nums=[1,2,3,4]#Thisworks,butismoreverbosethanI'dlikenums.eachdo|i|putsiend#InJS,Icouldjustdosomethinglike:#nums.forEach(console.log)#InF#,itwouldbesomethinglike:#List.iternums(printf"%A")#InRuby,IwishIcoulddosomethinglike:nums.eachputs在Ruby中能不能做到类似的简洁?我可以只
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
我想知道Ruby用来在命令行打印这些东西的输出流:irb(main):001:0>a="test"=>"test"irb(main):002:0>putsatest=>nilirb(main):003:0>a=>"test"$stdout是否用于irb(main):002:0>和irb(main):003:0>?而且,在这两次调用之间,$stdout的值是否有任何变化?另外,有人能告诉我打印/写入这些内容的Ruby源代码吗? 最佳答案 是的。而且很容易向自己测试/证明。在命令行试试这个:ruby-e'puts"foo"'>test.