静态时序分析简明教程一:绪论
一个数字芯片工程师的核心竞争力是什么?不同的工程师可能给出不同的答复,有些人可能提到硬件描述语言,有些人可能会提到对于特定算法和协议的理解,有些人或许会提到对于软硬件的结合划分,作者想说,这些说法,其实对也不对,硬件描述语言,翻来覆去无非是always和assign这几个语句的反复使用,而一些基础的协议算法,深究起来其实也并不复杂,于作者而言,在常规的技能以外,有两项额外的技能颇为重要,其中之一便为sdc/STA的分析能力,它的重要之处在于作为桥梁建立了前端和后端的连接,虽然对于DE工程师而言,初版交付的sdc往往不甚准确,也没有办法通过这份sdc生成一份无误的timing report,但sdc的内容体现却是完完整整的将时序约束从行为级的描述映射到了gate level这样一个真实的电路层次上面。
写此专栏,一为学习记录,二为交流分享,以犒粉丝读者。
静态时序分析简明教程(一)绪论
静态时序分析简明教程(二)基础知识:建立保持时间,时序分析路径
静态时序分析简明教程(三)备战秋招,如何看懂一个陌生的timing report
静态时序分析简明教程(四)时钟常规约束
静态时序分析简明教程(五)时钟其他特性
静态时序分析简明教程(六)端口延迟
静态时序分析简明教程(七)完整端口约束
静态时序分析简明教程(八)虚假路径
静态时序分析简明教程(九)多周期路径
静态时序分析简明教程(十)组合电路路径
静态时序分析简明教程(十一)模式分析与约束管理
静态时序分析简明教程(十二)浅议tcl语言
众所周知,PPA这三个要素的合理平衡,是一款芯片能否成功的重要因素,Power Performance Area中,performance的衡量可以有很多因素,其中就包括频率性能,也就是时序需求,STA静态时序分析就是检查所设计的电路是否能满足时序需求的方法,设计工程师会在综合之后根据设计的sdc进行一次初步的STA检查,但是在综合阶段,许多关于时钟网络的假设其实是不可用的,只有当完成布局规划,做完时钟树综合,才能得到一个相对准确的时序分析结果,因此DE工程师是第一遍尝试STA分析的芯片设计人员。
常规的芯片设计团队往往很少考虑时序问题,因为对于他们而言,他们的目标更多的聚焦于如何实现功能需求,物理设计团队负责满足时序要求,但是他们不清楚设计的内部结构,因此他们需要依靠于DE来实现时序约束。约束领域充满了细微的差别:不同的约束方式,虽然可能对于逻辑功能来说区别不大,但是会实打实的影响硬件设计的性能,进而影响芯片的质量,因此正确的理解和书写约束,变得非常重要。
时序约束最终是作用在真实电路上的延时约束,从Verilog这样一个行为级的描述过渡到真实的电路所需要经历的步骤被叫做综合,因此在绪论中,我们也需要搞明白综合是什么和综合是怎么作用在时序约束上的这两大问题。
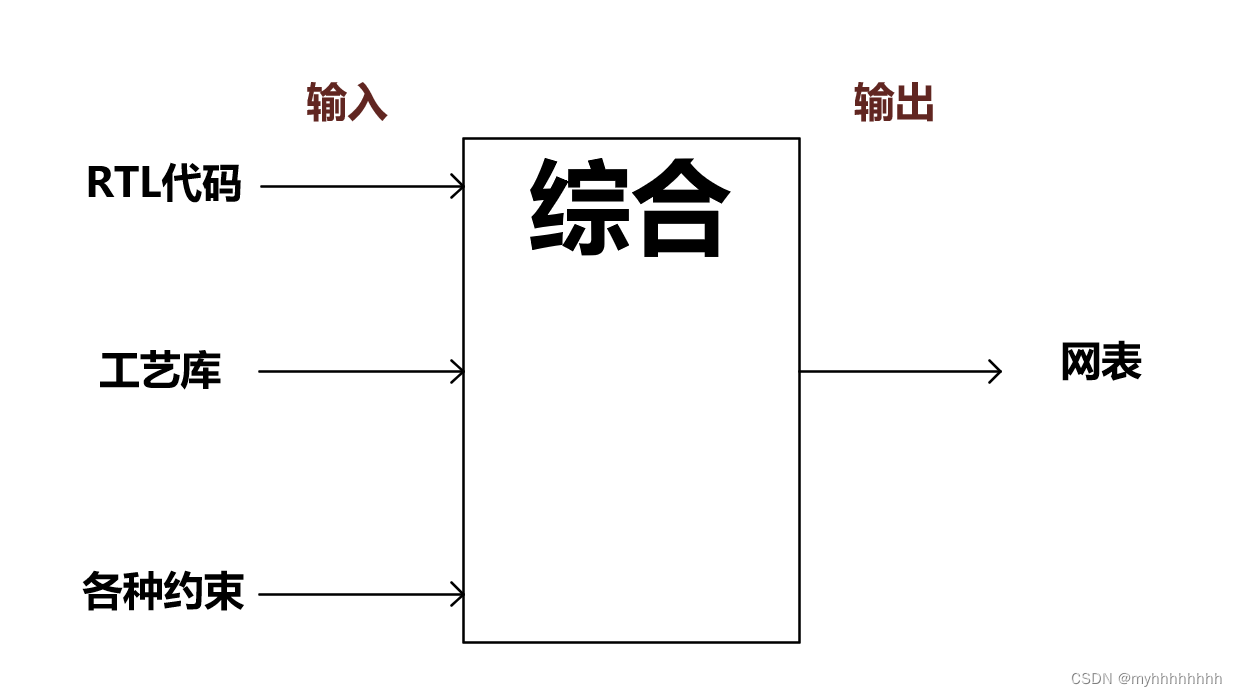
综合就是,在约束条件(时序约束、面积约束)下,使用特定厂商的工艺库(TSMC 7nm/5nm),将RTL代码(Verilog),转变为网表(记录wire/DFF等门级电路信息)的一个步骤,一个形象的图片如下:
综合过程中面积优先/时序优先/时序的约束等不同的综合策略切实的影响着静态时序分析的结果,具体的原因可以简明分析两种如下
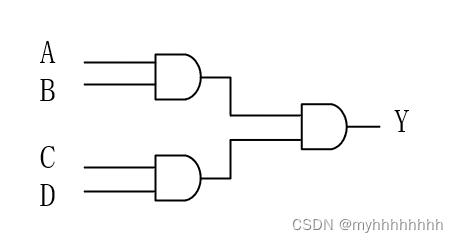
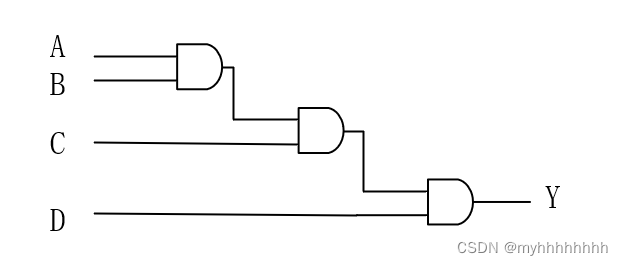
以下的例子切实的反映了综合结果对于时序的影响,两种逻辑排布在逻辑的层面上是一样的,有着相同的真值表,但是对于第一张图片而言,输入经过两级逻辑就可以抵达输出Y,而对于下面的图片而言,输入需要经过三级逻辑才可以抵达输出Y,具体选择哪种逻辑是根据时序约束决定的,通常情况下,大家会认为第一种会比第二种排列好,因为delay少。
但这个说法实际不绝对,因为delay的长短可以分别使建立时间和保持时间的压力变小,不过修保持时间的方法简单,修建立时间的方法复杂困难,因此更倾向于使用第一种逻辑排布,优先保证建立时间而已。
除了上面的例子,我们可以再举一个例子说明综合对于静态时序分析的影响,同样的一个输出不做改变的赋值给八个新的端口,以下的两种综合结果对应的HDL语言是一致的
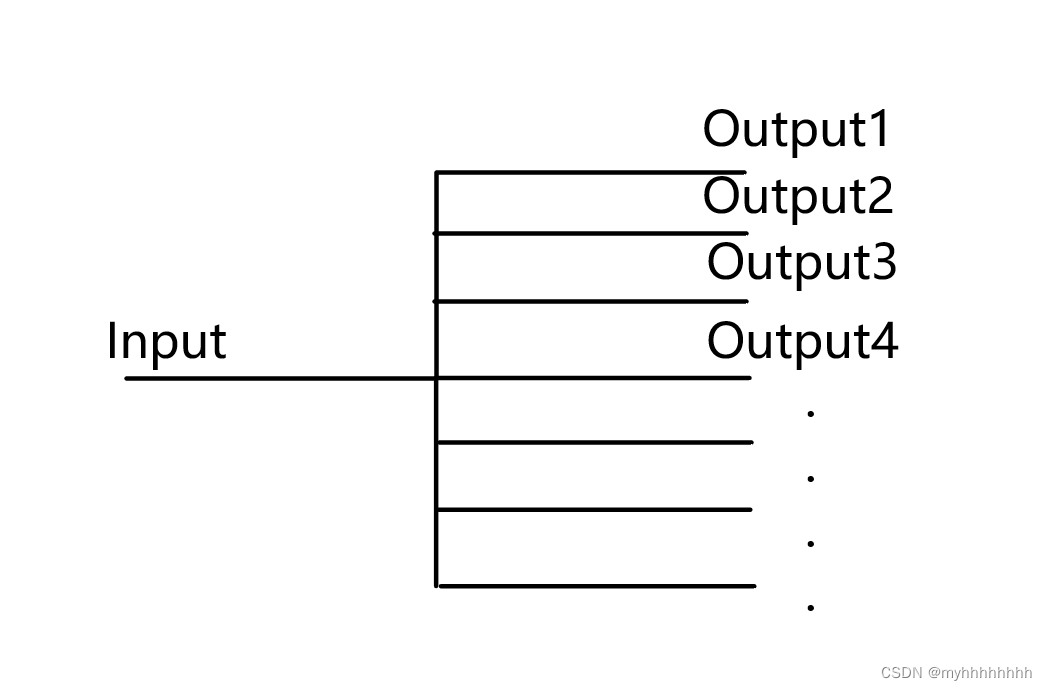
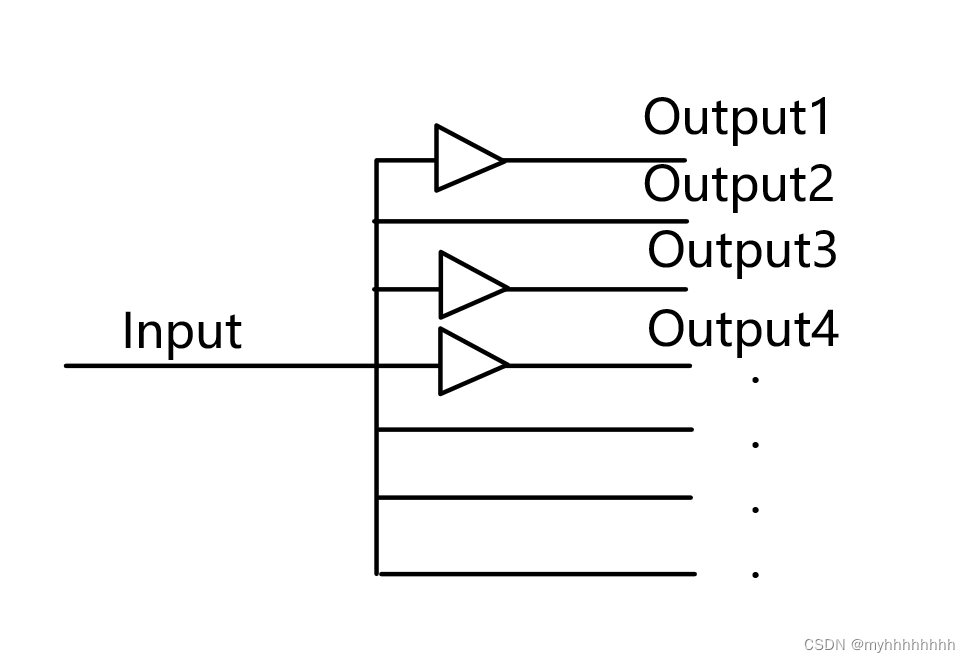
但是综合出来的电路中,第二种逻辑排布的output1,output3和output4分别插入了buffer,增强了驱动,因此他们这几个端口的后续门电路的开启和关闭会比output2快(电子在端口的积累速度快),在这种层面上影响了静态时序分析的结果。
在本文中,我们讨论了什么是时序分析和它的意义,接着介绍了时序约束的第一步:综合,重点从不同综合结果对于时序影响的层面上展开分析。
1.postman介绍Postman一款非常流行的API调试工具。其实,开发人员用的更多。因为测试人员做接口测试会有更多选择,例如Jmeter、soapUI等。不过,对于开发过程中去调试接口,Postman确实足够的简单方便,而且功能强大。2.下载安装官网地址:https://www.postman.com/下载完成后双击安装吧,安装过程极其简单,无需任何操作3.使用教程这里以百度为例,工具使用简单,填写URL地址即可发送请求,在下方查看响应结果和响应状态码常用方法都有支持请求方法:getpostputdeleteGet、Post、Put与Delete的作用get:请求方法一般是用于数据查询,
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
我是Ruby新手,并被要求在我们的新项目中使用它。我们还被要求使用Padrino(Sinatra)作为后端/框架。我们被要求使用Rspec进行测试。我一直在寻找可以指导在Padrino上使用RspecforRuby的教程。我得到的主要是引用RoR。但是,我需要RubyonPadrino。请在任何入门/指南/引用/讨论等方面指导我。如有不妥之处请指正。可能是我没有针对我的问题搜索正确的词/短语组合。我正在使用Ruby1.9.3和Padrinov.0.10.6。注意:我还提到了SOquestion,但它没有帮助。 最佳答案 我没用过Pa
我写了一个脚本,其中包含一些方法定义,没有类和一些公共(public)代码。其中一些方法执行一些非常耗时的shell程序。然而,这些shell程序只需要在第一次调用该方法时执行。现在在C中,我会在每个方法中声明一个静态变量,以确保这些程序只执行一次。我怎么能在Ruby中做到这一点? 最佳答案 ruby中有一个成语:x||=y。defsomething@something||=calculate_somethingendprivatedefcalculate_something#somelongprocessend但是如果您的“长时间
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
文章目录1.任务背景2.任务目标3.相关知识点4.任务实操4.1安装配置JDK4.2启动FISCOBCOS4.3下载解压WeBASE-Front4.4拷贝sdk证书文件4.5启动节点4.6访问节点4.7检查运行状态5.任务总结1.任务背景FISCOBCOS其实是有控制台管理工具,用来对区块链系统进行各种管理操作。但是对于初学者来说,还是可视化界面更友好,本节就来介绍WeBASE管理平台,这是一款微众银行开源的自研区块链中间件平台,可以降低区块链使用的门槛,大幅提高区块链应用的开发效率。微众银行是腾讯牵头设立的民营银行,在国内民营银行里还是比较出名的。微众银行参与FISCOBCOS生态建设,一定
网站的日志分析,是seo优化不可忽视的一门功课,但网站越大,每天产生的日志就越大,大站一天都可以产生几个G的网站日志,如果光靠肉眼去分析,那可能看到猴年马月都看不完,因此借助网站日志分析工具去分析网站日志,那将会使网站日志分析工作变得更简单。下面推荐两款网站日志分析软件。第一款:逆火网站日志分析器逆火网站日志分析器是一款功能全面的网站服务器日志分析软件。通过分析网站的日志文件,不仅能够精准的知道网站的访问量、网站的访问来源,网站的广告点击,访客的地区统计,搜索引擎关键字查询等,还能够一次性分析多个网站的日志文件,让你轻松管理网站。逆火网站日志分析器下载地址:https://pan.baidu.
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
目录一.大致如下常见问题:(1)找不到程序所依赖的Qt库version`Qt_5'notfound(requiredby(2)CouldnotLoadtheQtplatformplugin"xcb"in""eventhoughitwasfound(3)打包到在不同的linux系统下,或者打包到高版本的相同系统下,运行程序时,直接提示段错误即segmentationfault,或者Illegalinstruction(coredumped)非法指令(4)ldd应用程序或者库,查看运行所依赖的库时,直接报段错误二.问题逐个分析,得出解决方法:(1)找不到程序所依赖的Qt库version`Qt_5'