最近作者受到邀请,让我帮忙给刚入门的学弟讲讲滑模控制。可是作者也不知道怎么向未入门的学弟讲解这些基础知识,所以作者翻了翻近几年写的很好的文章以及视频。综合起来,来总结出一套比较基础,且适用于初学者的文章吧。这里我们先贴一下王崇卫同学的笔记。
对应的视频连接在下面:
【Advanced控制理论】17
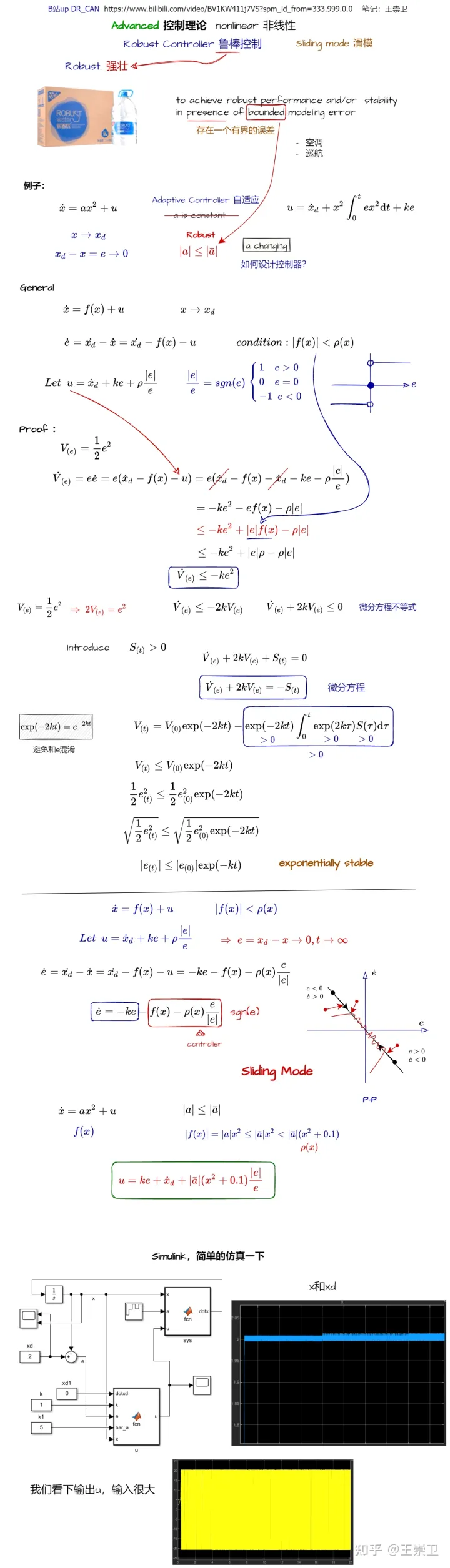
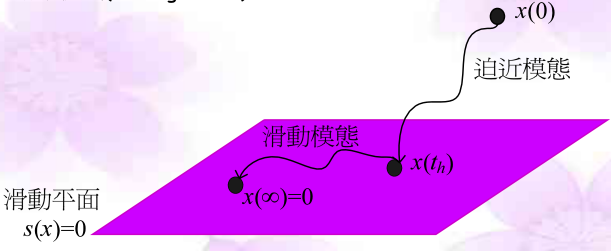
对于滑模控制而言,我觉得我们先要明白其目的再来学习。一开始我们对滑动控制的定义是:滑动模式是先使用受控系统产生两个以上的子系统,然后再刻意加入一些切换条件产生滑动模式,以达成控制目标的一种技术。
滑模控制(sliding mode control, SMC)也叫变结构控制,其本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。
例如滑动模式控制中存在滑动曲面
s
=
0
s=0
s=0,一开始时,系统会在有限时间内到达滑动曲面,之后就会沿着滑动曲面移动。在滑动模式的理论叙述中,系统会约束在滑动曲面上,因此只需将系统视为在滑动曲面上滑动。不过实际系统的实现是用高频切换来让系统近似在滑动曲面上滑动,高频切换的控制信号让系统在很邻近滑动曲面的范围内切跳(chatter),而且其频率是不固定的。虽然整体系统是非线性的,不过下图中,当系统到达滑动曲面后,理想(没有切跳)系统会限制在
s
=
0
s=0
s=0的滑动曲面上,滑动曲面是线性时不变系统,在原点处指数稳定。
滑动模态可以设计且与对象参数和扰动无关,具有快速响应、对参数变化和扰动不灵敏( 鲁棒性)、无须系统在线辨识、物理实现简单。
当状态轨迹到达滑动模态面后,难以严格沿着滑动模态面向平衡点滑动,而是在其两侧来回穿越地趋近平衡点,从而产生抖振——滑模控制实际应用中的主要障碍。国内外主要通过改进滑模趋近律达到减弱抖振的目的。
上文讲到滑模变结构控制器设计也包括两部分,一是能从状态空间的任何位置有限时间到达滑模面 s = 0 s = 0 s=0,二是在滑模面上可以收敛到原点(平衡点)。这也就代表我们要存在有一个稳定的滑模面,且该滑模面是可达的。为此有以下四个条件:
下面将按照四个条件来叙述如何设计滑模控制的控制器,这里的部分内容借鉴了文章滑动模型控制(Sliding Mode Control),并结合作者的理解进行写作。
首先第一步就是我们需要明白,我们需要找到一个滑模面来让被控系统在滑模面上维持稳定。
例如假设存在一个被控系统:
x
˙
1
=
x
2
x
˙
2
=
u
\begin{aligned} \dot{x}_1 &= x_2 \\ \dot{x}_2 &= u \end{aligned}
x˙1x˙2=x2=u
这个时候我们就需要根据被控系统设计一个滑模面,滑模面一般可以设计为如下的形式
s
(
x
)
=
∑
i
=
1
n
−
1
c
i
x
i
+
x
n
s(x) = \sum_{i=1}^{n-1} c_i x_i + x_n
s(x)=i=1∑n−1cixi+xn
因为在滑模控制中,要保证多项式
p
n
−
1
+
c
n
p
n
−
2
+
⋯
+
c
2
p
+
c
1
p^{n − 1} + c_n p^{n − 2} + \cdots + c_2 p + c_1
pn−1+cnpn−2+⋯+c2p+c1为Hurwitz (简单来说这条条件是为了满足状态在
s
=
0
s=0
s=0的滑模面上可以收敛)。
什么是Hurwitz,即上述多项式的特征值的实数部分在左半平面,即为负。
我们可以看到上述的被控系统是存在有两个变量,所以需要取 n = 2 n=2 n=2,即 s ( x ) = c 1 x 1 + x 2 s ( x ) = c_1 x_1 + x_2 s(x)=c1x1+x2,为了保证多项式 p + c 1 p+c_1 p+c1为Hurwitz,需要多项式 p + c 1 = 0 p+c_1=0 p+c1=0的特征值实数部分为负,即 c 1 > 0 c_1>0 c1>0。
我们知道滑模控制需要使得状态 x 1 x_1 x1 和 x 2 x_2 x2的导数均达到零,我们令 s = 0 s=0 s=0,分析一下结果有
{ c x 1 + x 2 = 0 x ˙ 1 = x 2 ⇒ c x 1 + x ˙ 1 = 0 ⇒ { x 1 ( t ) = e − c t x 1 ( 0 ) x 2 ( t ) = x ˙ 1 ( t ) = − c x 1 ( 0 ) e − c t \left\{\begin{aligned} &cx_1 + x_2 = 0 \\ &\dot{x}_1 = x_2 \end{aligned}\right. ~~ \Rightarrow ~~ c x_1 + \dot{x}_1 = 0 ~~ \Rightarrow ~~ \left\{\begin{aligned} &x_1(t) = \text{e}^{-ct} x_1(0) \\ &x_2(t) = \dot{x}_1(t) = -c x_1(0) \text{e}^{-ct} \end{aligned}\right. {cx1+x2=0x˙1=x2 ⇒ cx1+x˙1=0 ⇒ {x1(t)=e−ctx1(0)x2(t)=x˙1(t)=−cx1(0)e−ct
通过上式可以看到状态 x 1 x_1 x1 和 x 2 x_2 x2 最终都是趋向于零的,而且速度是以指数速率趋紧的。指数速率意味着当 t = 1 / c t=1/c t=1/c时,趋零过程完成 63.2 % 63.2\% 63.2%,当 t = 3 / c t=3/c t=3/c时,趋零过程完成 95.021 % 95.021\% 95.021%。那么我们通过调节参数 c c c的大小即可实现对趋零速度的调节, c c c 越大,速度越快。
因此如果满足了 s = c x 1 + x 2 = 0 s=cx_1 + x_2=0 s=cx1+x2=0,那么系统的状态 x 1 x_1 x1 和 x 2 x_2 x2也将沿着滑模面趋近于零 ( s = 0 s=0 s=0称之为滑模面)。
在拿到滑模面后则证明被控系统的稳定性条件成立,下面一步就是可达性条件,即状态 x x x 从状态空间中任意一点出发,可以在有限时间到达 s = 0 s=0 s=0 的滑模面上,此时我们可以采用李雅普诺夫间接法来分析,从前面可知,切换函数 s s s 是状态变量 x x x 的函数,取以下的李雅普诺夫函数
V = 1 2 s 2 V = \frac{1}{2} s^2 V=21s2
对时间求导可得
V
˙
=
s
s
˙
=
s
(
−
sgn
(
s
)
−
s
)
=
−
sgn
(
s
)
s
−
s
2
=
−
(
∣
s
∣
+
s
2
)
<
0
\begin{aligned} \dot{V} &= s \dot{s} \\ &= s (-\text{sgn}(s) - s) \\ &= -\text{sgn}(s) s - s^2 \\ &= -(|s| + s^2) < 0 \end{aligned}
V˙=ss˙=s(−sgn(s)−s)=−sgn(s)s−s2=−(∣s∣+s2)<0
为了使系统稳定,我们需要使 V ˙ < 0 \dot{V}<0 V˙<0,即 s s ˙ < 0 s \dot{s}<0 ss˙<0。此时系统对于 s s s而言是渐进稳定,不能保证其有限时间到 s = 0 s=0 s=0 的滑模面上(渐进稳定是当 t t t趋于无穷时,状态变量 x x x 趋于 0 0 0,即无限时间到达),因此需要 s s ˙ < − σ s \dot{s}<-\sigma ss˙<−σ, σ \sigma σ是一个极小的正数。 以上就是可达性条件成立的必要依据 \color{red}{以上就是可达性条件成立的必要依据} 以上就是可达性条件成立的必要依据。
但是实际上每次设计总不能都用李雅普诺夫函数判断,于是人们就提出了趋近律这一概念,常用的趋近律有如下几种,其中 sgn ( s ) \text{sgn}(s) sgn(s) 是符号函数, s > 0 , sgn ( s ) = 1 ; s < 0 , sgn ( s ) = − 1 ; s = 0 , sgn ( s ) = 0 s>0,\text{sgn}(s)=1; s<0, \text{sgn}(s)=-1; s=0, \text{sgn}(s)=0 s>0,sgn(s)=1;s<0,sgn(s)=−1;s=0,sgn(s)=0:
等速趋近律: s ˙ = − ϵ sgn ( s ) , ϵ > 0 \dot{s} = -\epsilon ~\text{sgn}(s), ~~~~\epsilon > 0 s˙=−ϵ sgn(s), ϵ>0
指数趋近律: s ˙ = − ϵ sgn ( s ) − k s , ϵ > 0 , k > 0 \dot{s} = -\epsilon ~\text{sgn}(s) - k s, ~~~~\epsilon > 0, k>0 s˙=−ϵ sgn(s)−ks, ϵ>0,k>0
幂次趋近律: s ˙ = − k ∣ s ∣ α sgn ( s ) − k s , k > 0 , 0 < α < 1 \dot{s} = -k |s|^\alpha ~\text{sgn}(s) - k s, ~~~~k>0, 0<\alpha<1 s˙=−k∣s∣α sgn(s)−ks, k>0,0<α<1
一般在使用时候我们需要完成这些参数的调整,一般我们使用的是指数趋近率,并将 ϵ \epsilon ϵ和 k k k的值均设为1,简化为:
s ˙ = sgn ( s ) − s \dot{s} = ~\text{sgn}(s) - s s˙= sgn(s)−s
然后我们可知 s ( x ) = c 1 x 1 + x 2 s ( x ) = c_1 x_1 + x_2 s(x)=c1x1+x2,则 s ˙ = sgn ( s ) − s = c 1 x 1 ˙ + x 2 ˙ = c 1 x 2 + u \dot{s} = ~\text{sgn}(s) - s = c_1 \dot{x_1} + \dot{x_2} = c_1x_2+u s˙= sgn(s)−s=c1x1˙+x2˙=c1x2+u。则我们可以得到控制器 u u u为:
u = sgn ( s ) − s − c 1 x 2 u = ~\text{sgn}(s) - s - c_1x_2 u= sgn(s)−s−c1x2
这就得到了我们必要的两个条件即,存在滑模面 s s s以及可达性控制器 u u u.
下面是最简单的python代码
当我在Rails控制台中按向上或向左箭头时,出现此错误:irb(main):001:0>/Users/me/.rvm/gems/ruby-2.0.0-p247/gems/rb-readline-0.4.2/lib/rbreadline.rb:4269:in`blockin_rl_dispatch_subseq':invalidbytesequenceinUTF-8(ArgumentError)我使用rvm来管理我的ruby安装。我正在使用=>ruby-2.0.0-p247[x86_64]我使用bundle来管理我的gem,并且我有rb-readline(0.4.2)(人们推荐的最少
我正在使用Ruby2.1.1和Rails4.1.0.rc1。当执行railsc时,它被锁定了。使用Ctrl-C停止,我得到以下错误日志:~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`gets':Interruptfrom~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.2/lib/spring/client/run.rb:47:in`verify_server_version'from~/.rvm/gems/ruby-2.1.1/gems/spring-1.1.
我将我的Rails应用程序部署到OpenShift,它运行良好,但我无法在生产服务器上运行“Rails控制台”。它给了我这个错误。我该如何解决这个问题?我尝试更新rubygems,但它也给出了权限被拒绝的错误,我也无法做到。railsc错误:Warning:You'reusingRubygems1.8.24withSpring.UpgradetoatleastRubygems2.1.0andrun`gempristine--all`forbetterstartupperformance./opt/rh/ruby193/root/usr/share/rubygems/rubygems
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
在我的Character模型中,我添加了:字符.rbbefore_savedoself.profile_picture_url=asset_path('icon.png')end但是,对于数据库中已存在的所有角色,它们的profile_picture_url为nil。因此,我想进入控制台并遍历所有这些并进行设置。在我试过的控制台中:Character.find_eachdo|c|c.profile_picture_url=asset_path('icon.png')end但这给出了错误:NoMethodError:undefinedmethod`asset_path'formain:O
当我进入Rails控制台时,我已将pry设置为加载代替irb。我找不到该页面或不记得如何将其恢复为默认行为,因为它似乎干扰了我的Rubymine调试器。有什么建议吗? 最佳答案 我刚发现问题,pry-railsgem。忘记了它的目的是让“railsconsole”打开pry。 关于ruby-on-rails-带有Pry的Rails控制台,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/question