基于51单片机驱动HC-SR04超声波模块(LCD1602显示)

HC- SR04+是一款宽电压工作的超声波测距模块。模块外形尺寸及软件与老版本
HC- SR04完全兼容;可以与老版本HC SR04无缝切换。低至3V的低工作电压,
使其与3.3V供电的MCU可以直接连接。
特点
探测角度: <15°
采用工业级MCU,工作温度:-20C~80C
探测距离:5V:2cm-- 450cm;3.3V: 2cm–400cm
宽电压工作: 3V-5.5V与HC SR04软件与硬件尺寸完全兼容
板.上接线方式,VCC、trig (控制端)、echo( 接收端)、out(空脚,GND)。
注意:模块应先插好在电路板上再通电,避免产生高电平的误动作,如果产生了,
重新通电方可解决。
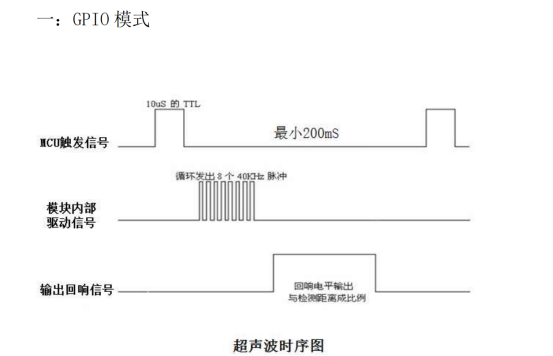
//HC-SR04接线定义
sbit INPUT = P1^2; //回声接收端口
sbit OUTPUT = P1^3; //超声触发端口
//LCD1602接线定义
//D0-D7----------P0
sbit rs = P0^7;
sbit rw = P0^6;
sbit lcden = P0^5;
/******************************************************************************/
/* 函数名称 : main */
/* 函数描述 : 主函数 */
/* 输入参数 : 无 */
/* 参数描述 : 无 */
/* 返回值 : 无 */
/******************************************************************************/
void main(void)
{
rw = 0;
initLCD();
Init_MCU();
Init_Parameter();
display_char(table,0x00);
display_char(table0,0x40);
Delay_xMs(30000);
display_char(table2,0x00);
display_char(table1,0x40);
while(1)
{
Trig_SuperSonic(); //触发超声波发射
while(INPUT == 0) //等待回声
{
;
}
Measure_Distance(); //计算脉宽并转换为距离
display_char(table3,0x40);
display(distance,0x49); //显示距离
Init_Parameter(); // 参数重新初始化
delayt(100); //延时,两次发射之间要至少有10ms间隔
}
}
1、供电3.3V,5V均可,尽量供电不超过5V,不低于3.3V
2、测量距离是平面距离,斜面测误差会特别大
3、测量角度是15度以内,测量范围内有其他物体挡住也会影响测量结果
需要完整工程的可以下方留言
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易
如果我在功能规范中调用url_for,它会返回一个以http://www.example.com/开头的绝对URL.Capybara会很乐意尝试加载该站点上的页面,但这与我的应用程序无关。以下是重现该问题的最少步骤:从这个Gemfile开始:source'https://rubygems.org'gem"sqlite3"gem"jquery-rails"gem"draper"gem"rails",'4.1.0'gem"therubyracer"gem"uglifier"gem"rspec-rails"gem"capybara"gem"poltergeist"gem"launchy"运行
在笔者前面有一篇文章《驱动开发:断链隐藏驱动程序自身》通过摘除驱动的链表实现了断链隐藏自身的目的,但此方法恢复时会触发PG会蓝屏,偶然间在网上找到了一个作者介绍的一种方法,觉得有必要详细分析一下他是如何实现的进程隐藏的,总体来说作者的思路是最终寻找到MiProcessLoaderEntry的入口地址,该函数的作用是将驱动信息加入链表和移除链表,运用这个函数即可动态处理驱动的添加和移除问题。MiProcessLoaderEntry(pDriverObject->DriverSection,1)添加MiProcessLoaderEntry(pDriverObject->DriverSection,
本人是音乐爱好者,从小就特别喜欢那个随着音乐跳动的方框效果,就是这个:arduino上一大把对,我忍你很久了,我就想用mpy做,全网没有,行我自己研究。果然兴趣是最好的老师,我之前有篇博客专门讲音频,有兴趣的可以回顾一下。提到可视化频谱,必然绕不开fft,大学学过这玩意,当时一心玩,老师讲的一个字都么听进去,网上教程简略扫了一下,大该就是把时域转频域的工具,我大mpy居然没有fft函数,奶奶的,先放着。音频信息如何收集?第一种傻瓜式的ADC,模拟转数字,原始粗暴,第二种,I2S库,我之前博客有讲过,数据是PCM编码。然后又去学PCM编码,一学豁然开朗,舒服,以代码为例:audio_in=I2S
我有一个适用于事件/监听器模型的应用程序。发布了几种不同类型的数据(事件),然后许多不同的事情可能需要也可能不需要对该数据(监听器)采取行动。监听器的发生没有特定的顺序,每个监听器将决定是否需要对事件采取行动。Rails应用程序有哪些工具可以完成此任务?我希望自己不必这样做(尽管我可以。这没什么大不了的。)编辑:观察者模式可能是更好的选择 最佳答案 查看EventMachine.它是一个非常流行的Ruby事件处理库。它看起来相当不错,而且很多其他库似乎都在利用它(Cramp)。这是一个很好的介绍:http://rubylearnin
目录SPI总线SPI总线概述 SPI总线分类SPI优点及缺点SPI接口硬件原理SPI四种工作模式 74HC595应用74HC595芯片概述74HC595封装及管脚功能74HC595工作原理 编辑 74HC595串行转并行点亮LED灯 程序实现 Proteus运行结构示意图SPI总线SPI总线概述 SPI(SerialPeripheralinterface):串行外围设备接口 用途:用来在微控制器与外围设备芯片之间实现数据交换 特点:高速、全双工、同步 SPI总线分类四线制全双工SPI(同时收发)MISO 主机输入/从机输出MOSI 主机输出/从机输入SCLK 串行时钟CS或