文章目录
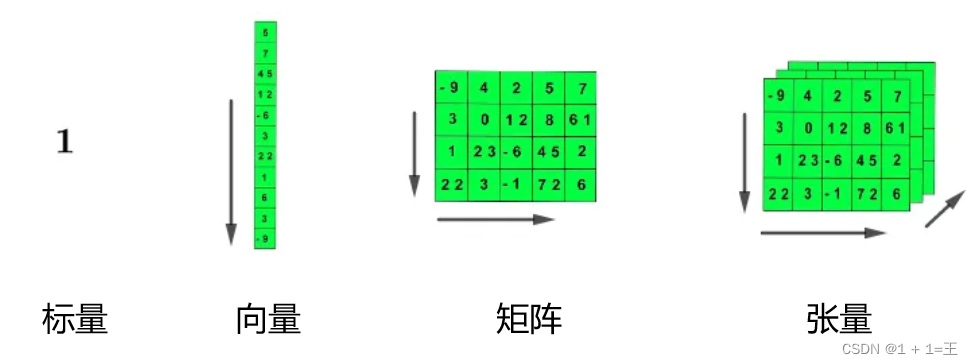
向量范数
设一个向量 ,不同范数表示如下:
,不同范数表示如下:
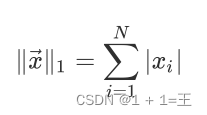
向量的1范数:向量的各个元素的绝对值之和
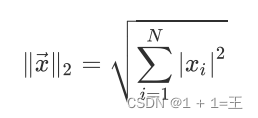
向量的2范数:向量的每个元素的平⽅和再开平⽅根
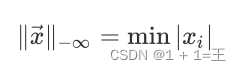
向量的负⽆穷范数:向量的所有元素的绝对值中最小的
向量的正⽆穷范数:向量的所有元素的绝对值中最大的
向量的p范数:
矩阵范数
设矩阵定义为Amxn,其元素为aij。
矩阵的1范数(列范数):矩阵的每⼀列上的元素绝对值先求和,再从中取个最⼤的,(列和最⼤)。
矩阵的2范数:矩阵ATA的最大特征值开平方根。
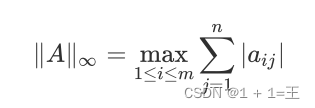
矩阵的⽆穷范数(⾏范数):矩阵的每⼀⾏上的元素绝对值先求和,再从中取个最⼤的,(⾏和最⼤)。
矩阵的L0范数:矩阵的⾮0元素的个数
矩阵的L1范数: 矩阵中的每个元素绝对值之和
矩阵的F范数: 矩阵的各个元素平⽅之和再开平⽅根,它通常也叫做矩阵的L2范数。

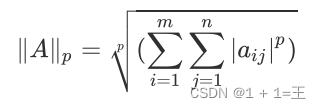
矩阵的p范数:
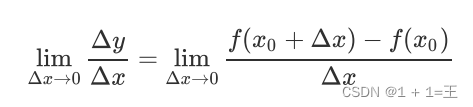
导数代表了在⾃变量变化趋于⽆穷⼩的时候,函数值的变化与⾃变量的变化的⽐值。⼏何意义是这个点的切线。物理意义是该时刻的(瞬时)变化率。
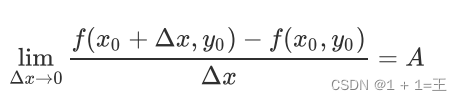
偏导数就是指多元函数沿着坐标轴的变化率。
特征值表⽰的是这个特征到底有多重要,⽽特征向量表⽰这个特征是什么。
如果说⼀个向量ν是矩阵A的特征向量,将⼀定可以表⽰成下⾯的形式:

λ为特征向量ν对应的特征值。即矩阵A的信息可以由其特征值和特征向量表⽰。
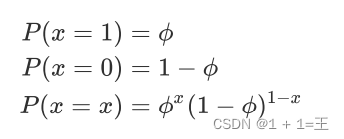
期望:φ, 方差:φ(1-φ)

期望:μ, 方差:φ
缺乏实数上分布的先验知识, 不知选择何种形式时, 默认选择正态分布。
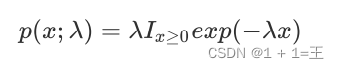
深度学习中, 指数分布⽤来描述在 点处取得边界点的分布:
数学期望是试验中每次可能结果的概率乘以其结果的总和。它反映随机变量平均取值的⼤⼩。

离散函数

连续函数

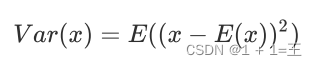
⽅差⽤来度量随机变量和其数学期望之间的偏离程度。
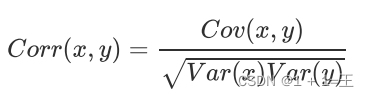
协⽅差是衡量两个变量线性相关性强度及变量尺度。

相关系数是研究变量之间线性相关程度的量。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
我有一个涉及多台机器、消息队列和事务的问题。因此,例如用户点击网页,点击将消息发送到另一台机器,该机器将付款添加到用户的帐户。每秒可能有数千次点击。事务的所有方面都应该是容错的。我以前从未遇到过这样的事情,但一些阅读表明这是一个众所周知的问题。所以我的问题。我假设安全的方法是使用两阶段提交,但协议(protocol)是阻塞的,所以我不会获得所需的性能,我是否正确?我通常写Ruby,但似乎Redis之类的数据库和Rescue、RabbitMQ等消息队列系统对我的帮助不大——即使我实现某种两阶段提交,如果Redis崩溃,数据也会丢失,因为它本质上只是内存。所有这些让我开始关注erlang和
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
我是Cucumber测试的新手。我创建了两个特征文件:events.featurepartner.feature并将我的步骤定义放在step_definitions文件夹中:./step_definitions/events.rbpartner.rbCucumber似乎在所有.rb文件中查找步骤信息。有没有办法限制该功能查看特定的步骤定义文件?我之所以要这样做,是因为即使我使用了--guess标志,我也会遇到不明确的匹配错误。我之所以要这样做,有以下几个原因。我正在测试CMS,并希望在不同的功能中测试每种不同的内容类型(事件和合作伙伴)。事件.特征Feature:AddpartnerA
完成这个有困难。我正在使用seed.rb+factory_girl来使用rakedb:seed填充数据库。(我知道固定装置存在,但我想以这种方式完成,这只是一个示例,数据库将填充复杂的关联对象。)我的种子.rb:require'factory_girl_rails'["QM","CDC","SI","QS"].eachdo|n|FactoryGirl.create(:grau,nome:n)end还有我的/factories/graus.rbFactoryGirl.definedofactory:graudonomeendend但是当我运行时:rakedb:seed我得到:rakeab
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。
我有以下工厂:FactoryGirl.definedofactory:foodosequence(:name){|n|"Foo#{n}"}trait:ydosequence(:name){|n|"Fooy#{n}"}endendend如果我跑create:foocreate:foocreate:foo,:y我得到Foo1,Foo2,Fooy1。但我想要Foo1,Foo2,Fooy3。我怎样才能做到这一点? 最佳答案 经过smile2day'sanswer的一些提示后和thisanswer,我得出以下解决方案:FactoryGirl.
我有一个启动DRb服务的脚本,然后生成处理程序对象并通过DRb.thread.join等待。我希望脚本一直运行直到被明确杀死,所以我添加了trap"INT"doDRb.stop_serviceend在Ruby1.8下成功停止DRb服务并退出,但在1.9下似乎死锁(在OSX10.6.7上)。对该进程进行采样显示在semaphore_wait_signal_trap中有几个线程在旋转。我假设我在调用stop_service时做错了什么,但我不确定是什么。谁能给我任何关于如何正确处理它的指示? 最佳答案 好的,我想我已经找到了解决方案。如
一、习惯约定图片来自PSINS(高精度捷联惯导算法)PSINS工具箱入门与详解.pptx二、基本旋转矩阵绕x轴逆时钟旋转α\alphaα角度Rx(α)=[ 1000cosαsinα0−sinαcosα]R_x(\alpha)=\begin{bmatrix}\1&0&0\\0&\cos\alpha&\sin\alpha\\0&-\sin\alpha&\cos\alpha\end{bmatrix}Rx(α)= 1000cosα−sinα0sinαcosα绕y轴逆时钟旋转α\alphaα角度Ry(α)=[ cosα0−sinα010sinα0cosα]R_y(\alpha