在使用I2C通信时,一般会用到软件模拟I2C。目前网络上能搜索到的软件模拟I2C一般都是模拟I2C主机,很少有模拟I2C从机的例程。由于I2C主机在进行数据收发时,有明确的可预见性,也就是主机明确知道什么时候要进行数据的收发操作,而且I2C的同步时钟信号也是由主机产生的,所以实现起来相对来说比较简单。而I2C从机的通信受制于主机,即什么时候需要进行数据的收发都是由主机发起的,数据收发的发起时机具有随机性。由于实际使用时,MCU的固件还会执行其他的操作,所以如果单纯使用软件查询的方法来判断I2C通信的起始信号不太现实。这里提供一种软件模拟I2C从机的实现方法,考虑使用GPIO中断的方法来及时接收I2C通信的起始信号,并进行数据的收发。
这里使用的开发环境和相关硬件如下。
STM32软件模拟I2C从机的例程代码-单片机文档类资源-CSDN下载
这里结合开发板STM32F429I-DISCO上的STM32F429ZI的单片机来演示软件模拟I2C从机的实现方法。
I2C通信的时序图如下图1所示。
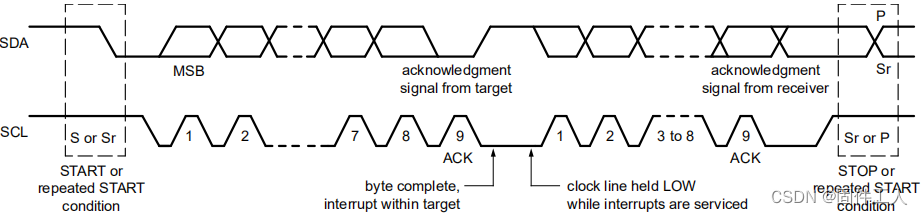
图1 I2C通信时序图
I2C通信的时序中关键的几个点如下。
由于各个关键点基本都发生在SCL或SDA的上升沿或者下降沿的地方,所以可以将用于模拟I2C通信引脚的GPIO口配置成边沿中断,这样就可以通过中断实时抓取边沿信号,并在中断中进行及时的数据处理。使用GPIO的边沿中断来模拟I2C从机的好处是可以实时获取到START和STOP信号,I2C主机发过来的数据可以通过中断得到及时处理,而且程序主流程无需关心模拟I2C从机的相关处理,可以处理其他事务。
因为是I2C从机,所以SCL引脚直接固定成输入引脚即可,而SDA信号由于是双向的,所以需要根据I2C通信中的各个状态来设置输入或输出方向。另外,由于GPIO中断只在GPIO配置成输入时才会产生,所以默认情况下,SDA必须设置成输入引脚。
程序的具体设计思路如下。
A. 发生下降沿中断时
A1. 如果状态机为START状态,则I2C通信正式开始,准备开始接收设备地址,状态机更新成DATA状态。
A2. 如果状态机为DATA状态,SCL下降沿计数小于8时,如果是主机读取数据,则更新SDA的位数据输出。SCL下降沿计数等于8时,进入应答阶段,状态机更新成ACK状态;如果是主机写入数据,并且是设备地址数据,则判断设备地址是否匹配,如果设备地址匹配,则将SDA设置成输出,并输出ACK信号,否则如果地址不匹配,则SDA保持为输入状态,不输出ACK信号;如果是主机读取数据,将SDA设置成输入,准备接收主机的应答信号。
A3. 如果状态机为ACK状态,这时应答信号已经传输完毕,状态机更新成DATA状态,准备继续接收或发送数据。如果是主机写入数据,将SDA设置成输入,继续接收后续数据;如果是主机读取数据,将SDA设置成输出,继续发送后续数据。
A4. 如果状态机为NACK状态,说明紧接着I2C通信将停止或重新启动,准备接收STOP或者ReSTART信号,所以需要将SDA设置成输入。此时状态机状态保持不变。
B. 发生上升沿中断时
B1. 如果状态机为DATA状态,I2C通信处于数据阶段,如果是主机写入数据,则采集主机通过SDA发送过来的位数据。
B2. 如果状态机为ACK状态,I2C通信处于应答阶段,如果是主机读取数据,则采集主机的应答信号,如果主机应答信号为1,说明主机发送了NACK的应答,状态机需要更新成NACK状态,准备接收停止或重新启动信号。
根据上面的程序思路,可以开始进行程序代码的设计,步骤如下。
1)设计I2C从机通信对应的结构体,I2C通信状态定义,I2C通信相关的宏定义的声明。对应的头文件代码如下。
#ifndef __SW_SLAVE_I2C_H_
#define __SW_SLAVE_I2C_H_
#ifdef __cplusplus
extern "C" {
#endif
#include "stm32f4xx_hal.h"
#define SW_SLAVE_ADDR 0xA2
#define SW_SLAVE_SCL_CLK_EN() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SW_SLAVE_SDA_CLK_EN() __HAL_RCC_GPIOB_CLK_ENABLE()
#define SW_SLAVE_SCL_PRT GPIOB
#define SW_SLAVE_SCL_PIN GPIO_PIN_6
#define SW_SLAVE_SDA_PRT GPIOB
#define SW_SLAVE_SDA_PIN GPIO_PIN_7
#define GPIO_MODE_MSK 0x00000003U
#define I2C_STA_IDLE 0
#define I2C_STA_START 1
#define I2C_STA_DATA 2
#define I2C_STA_ACK 3
#define I2C_STA_NACK 4
#define I2C_STA_STOP 5
#define I2C_READ 1
#define I2C_WRITE 0
#define GPIO_DIR_IN 0
#define GPIO_DIR_OUT 1
#define SET_SCL_DIR(Temp, InOut) \
Temp = SW_SLAVE_SCL_PRT->MODER; \
Temp &= ~(GPIO_MODER_MODER6); \
Temp |= ((InOut & GPIO_MODE_MSK) << (6 * 2U)); \
SW_SLAVE_SCL_PRT->MODER = temp;
#define SET_SDA_DIR(Temp, InOut) \
Temp = SW_SLAVE_SDA_PRT->MODER; \
Temp &= ~(GPIO_MODER_MODER7); \
Temp |= ((InOut & GPIO_MODE_MSK) << (7 * 2U)); \
SW_SLAVE_SDA_PRT->MODER = Temp;
#define CLR_SDA_PIN() (SW_SLAVE_SDA_PRT->BSRR = SW_SLAVE_SDA_PIN << 16)
#define SET_SDA_PIN() (SW_SLAVE_SDA_PRT->BSRR = SW_SLAVE_SDA_PIN)
typedef struct _SwSlaveI2C_t
{
uint8_t State; // I2C通信状态
uint8_t Rw; // I2C读写标志:0-写,1-读
uint8_t SclFallCnt; // SCL下降沿计数
uint8_t Flag; // I2C状态标志,BIT0:0-地址无效,1-地址匹配
uint32_t StartMs; // I2C通信起始时间,单位ms,用于判断通信是否超时
uint8_t* RxBuf; // 指向接收缓冲区的指针
uint8_t* TxBuf; // 指向发送缓冲区的指针
uint8_t RxIdx; // 接收缓冲区数据写入索引,最大值255
uint8_t TxIdx; // 发送缓冲区数据读取索引,最大值255
}SwSlaveI2C_t;
extern SwSlaveI2C_t SwSlaveI2C;
void InitSwSlaveI2C(void);
void I2cGpioIsr(void);
void CheckSwSlaveI2cTimeout(void);
#ifdef __cplusplus
}
#endif
#endif /* __SW_TIMER_H_ */2)I2C通信引脚SCL/SDA对应的GPIO的初始化。这里使用PB6/PB7引脚。代码如下。
void InitSwSlaveI2C(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable I2C GPIO clock */
SW_SLAVE_SCL_CLK_EN();
SW_SLAVE_SDA_CLK_EN();
/* Configure SCL GPIO pin */
GPIO_InitStructure.Pin = SW_SLAVE_SCL_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStructure.Pull = GPIO_PULLUP;
GPIO_InitStructure.Speed = GPIO_SPEED_FAST;
HAL_GPIO_Init(SW_SLAVE_SCL_PRT, &GPIO_InitStructure);
/* Configure SDA GPIO pin */
GPIO_InitStructure.Pin = SW_SLAVE_SDA_PIN;
HAL_GPIO_Init(SW_SLAVE_SDA_PRT, &GPIO_InitStructure);
/* Configure SCL GPIO pin as input interruption with pull up */
GPIO_InitStructure.Pin = SW_SLAVE_SCL_PIN;
GPIO_InitStructure.Mode = GPIO_MODE_IT_RISING_FALLING;
HAL_GPIO_Init(SW_SLAVE_SCL_PRT, &GPIO_InitStructure);
/* Configure SDA GPIO pin as input interruption with pull up */
GPIO_InitStructure.Pin = SW_SLAVE_SDA_PIN;
HAL_GPIO_Init(SW_SLAVE_SDA_PRT, &GPIO_InitStructure);
/* Enable and set EXTI Line9_5 Interrupt to the highest priority */
HAL_NVIC_SetPriority(EXTI9_5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);
}3)由于SCL/SDA引脚被设置成中断引脚,需要实现GPIO的中断处理函数。中断处理函数中已经包含了软件模拟I2C从机的所有功能。代码如下。其中EXTI9_5_IRQHandler为STM32外部line9-5中断的入口函数,在该入口函数中调用模拟I2C从机的GPIO口中断处理函数I2cGpioIsr()。
void EXTI9_5_IRQHandler(void)
{
I2cGpioIsr();
}
void I2cGpioIsr(void)
{
uint32_t temp;
// 处理SCL的上下沿中断
if(__HAL_GPIO_EXTI_GET_IT(SW_SLAVE_SCL_PIN) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(SW_SLAVE_SCL_PIN);
// 更新通信起始时间
SwSlaveI2C.StartMs = HAL_GetTick();
// SCL的下降沿事件处理,此时需要更新要传输的数据
if((SW_SLAVE_SCL_PRT->IDR & SW_SLAVE_SCL_PIN) == (uint32_t)GPIO_PIN_RESET)
{
switch(SwSlaveI2C.State)
{
case I2C_STA_START: // 起始信号的下降沿,初始化相关参数并转到接收比特数据状态
SwSlaveI2C.SclFallCnt = 0;
SwSlaveI2C.RxIdx = 0;
SwSlaveI2C.TxIdx = 0;
SwSlaveI2C.Flag = 0; // 默认地址不匹配
SwSlaveI2C.RxBuf[SwSlaveI2C.RxIdx] = 0;
SwSlaveI2C.Rw = I2C_WRITE; // 第1字节为设备地址,一定是写入
SwSlaveI2C.State = I2C_STA_DATA;
break;
case I2C_STA_DATA:
SwSlaveI2C.SclFallCnt++;
if(8 > SwSlaveI2C.SclFallCnt)
{
// 如果是主机读取数据,则在SCL低电平时更新比特数据
if(SwSlaveI2C.Rw == I2C_READ)
{
if(SwSlaveI2C.TxBuf[SwSlaveI2C.TxIdx] & (1 << (7 - SwSlaveI2C.SclFallCnt)))
{
SET_SDA_PIN();
}
else
{
CLR_SDA_PIN();
}
}
}
else if(8 == SwSlaveI2C.SclFallCnt)
{
if(SwSlaveI2C.Rw == I2C_WRITE)
{
// 从第一个地址字节中获取读写标志位,并判断地址是否匹配
if(SwSlaveI2C.RxIdx == 0)
{
if((SwSlaveI2C.RxBuf[0] & 0xFE) == SW_SLAVE_ADDR)
{
SwSlaveI2C.Flag = 1; // 地址匹配
SwSlaveI2C.Rw = SwSlaveI2C.RxBuf[0] & 0x01;
}
}
if(SwSlaveI2C.Flag)
{
// 如果是主机写入数据,且地址匹配,则接收完8比特数据后,需要发送ACK信号进行应答
SET_SDA_DIR(temp, GPIO_DIR_OUT);
CLR_SDA_PIN();
}
}
else
{
// 如果是主机读取数据,需要将SDA设置成输入以便判断应答标志位状态
SET_SDA_DIR(temp, GPIO_DIR_IN);
// 如果是主机读取数据,准备发送下一个字节的数据
SwSlaveI2C.TxIdx++;
}
// 接收或发送完8比特数据后,准备发送或接收应答信号
SwSlaveI2C.State = I2C_STA_ACK;
}
break;
case I2C_STA_ACK:
SwSlaveI2C.SclFallCnt = 0;
if(SwSlaveI2C.Rw == I2C_WRITE)
{
// 如果是主机写入数据,且ACK发送完毕,则SDA设置成输入,继续接收数据
SET_SDA_DIR(temp, GPIO_DIR_IN);
SwSlaveI2C.RxIdx++;
SwSlaveI2C.RxBuf[SwSlaveI2C.RxIdx] = 0;
}
else
{
// 如果是主机读取数据,且ACK接收完毕,则SDA设置成输出,继续发送数据
SET_SDA_DIR(temp, GPIO_DIR_OUT);
if(SwSlaveI2C.TxBuf[SwSlaveI2C.TxIdx] & 0x80)
{
SET_SDA_PIN();
}
else
{
CLR_SDA_PIN();
}
}
SwSlaveI2C.State = I2C_STA_DATA;
break;
case I2C_STA_NACK: // 如果收到了NACK,则后面将是STOP或者ReSTART信号,需要将SDA设置成输入
SwSlaveI2C.SclFallCnt = 0;
SET_SDA_DIR(temp, GPIO_DIR_IN);
break;
}
}
// SCL的上升沿事件处理,此时需要采集数据,而且在数据阶段,SCL高电平时数据必须保持不变
else
{
switch(SwSlaveI2C.State)
{
case I2C_STA_DATA: // 数据阶段,如果是主机写入数据,则采集比特数据
if((I2C_WRITE == SwSlaveI2C.Rw) && (8 > SwSlaveI2C.SclFallCnt))
{
if(SW_SLAVE_SDA_PRT->IDR & SW_SLAVE_SDA_PIN)
{
SwSlaveI2C.RxBuf[SwSlaveI2C.RxIdx] |= (1 << (7 - SwSlaveI2C.SclFallCnt));
}
}
break;
case I2C_STA_ACK: // 应答阶段,如果是主机读取数据,则判断ACK/NACK信号,默认状态是ACK
if((SwSlaveI2C.Rw == I2C_READ) && (SW_SLAVE_SDA_PRT->IDR & SW_SLAVE_SDA_PIN))
{
SwSlaveI2C.State = I2C_STA_NACK;
}
break;
}
}
}
else if(__HAL_GPIO_EXTI_GET_IT(SW_SLAVE_SDA_PIN) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(SW_SLAVE_SDA_PIN);
if((SW_SLAVE_SDA_PRT->IDR & SW_SLAVE_SDA_PIN) == (uint32_t)GPIO_PIN_RESET)
{
// SCL为高电平时,SDA从高变低,说明是起始信号
if(SW_SLAVE_SCL_PRT->IDR & SW_SLAVE_SCL_PIN)
{
SwSlaveI2C.State = I2C_STA_START;
}
}
else
{
// SCL为高电平时,SDA从低变高,说明是停止信号,一次I2C通信结束,直接将状态设置成空闲
if(SW_SLAVE_SCL_PRT->IDR & SW_SLAVE_SCL_PIN)
{
SwSlaveI2C.State = I2C_STA_IDLE;
}
}
}
}4)为了确保模拟I2C从机通信的可靠性,额外设计了I2C通信超时处理函数。在I2C通信进行的过程中,如果通信出现了中断,则通过超时判断来重置I2C从机状态,确保出现通信异常时可以从异常状态中自动恢复。该函数需要在主流程中调用。代码如下。
void CheckSwSlaveI2cTimeout(void)
{
uint32_t TimeMs, TimeCurMs;
if(SwSlaveI2C.State != I2C_STA_IDLE)
{
TimeCurMs = HAL_GetTick();
if(TimeCurMs >= SwSlaveI2C.StartMs)
{
TimeMs = TimeCurMs - SwSlaveI2C.StartMs;
}
else
{
TimeMs = ~(SwSlaveI2C.StartMs - TimeCurMs) + 1;
}
if(500 <= TimeMs)
{
// I2C通信超时的话,重置状态机,并把SDA设置成输入
SwSlaveI2C.State = I2C_STA_IDLE;
SET_SDA_DIR(TimeMs, GPIO_DIR_IN);
}
}
}5)软件模拟I2C从机相关功能验证代码。这里需要借助STM32的另外一个I2C主机进行配合测试。这里将PF0/PF1对应的引脚配置成I2C主机,主机直接使用STM32的硬件I2C实现。PF0/PF1分别和PB7/PB6连接,然后验证数据收发的正确性。具体代码参见上面的工程链接。这里只展示最终的测试结果数据。如下图2和图3所示。
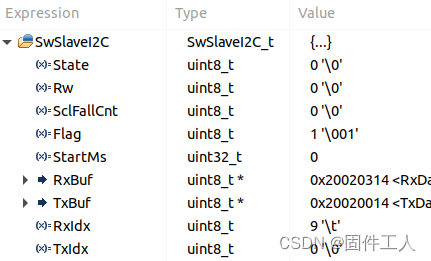
软件模拟I2C从机状态

I2C主机发送数据
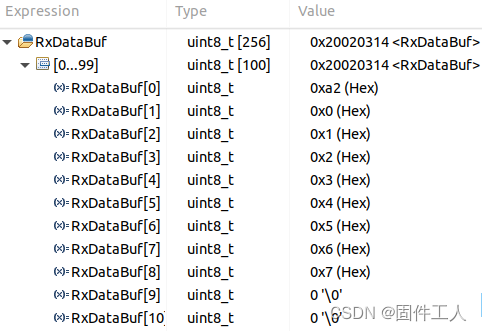
软件模拟I2C从机接收数据
图2 软件模拟I2C从机数据接收验证结果

软件模拟I2C从机状态

软件模拟I2C从机发送数据
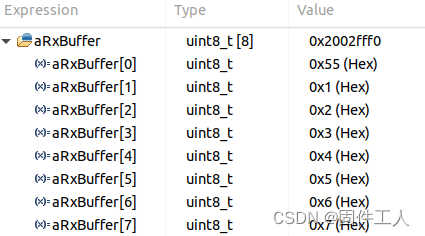
I2C主机接收数据
图3 软件模拟I2C从机数据发送验证结果
本例程中,对于400kbps速率的I2C通信,在进行代码编译链接时,需要使用-Ofast的优化方式,以提高中断处理函数的执行速度,使程序能正确执行。如果使用默认的无优化配置,会造成程序无法正确运行。
对于主频比较低的MCU,使用这里提供的软件模拟I2C从机进行I2C通信时,建议使用100kpbs以下的通信速率,并且注意使用可以提高代码执行速度的代码优化配置。
是的,我知道最好使用webmock,但我想知道如何在RSpec中模拟此方法:defmethod_to_testurl=URI.parseurireq=Net::HTTP::Post.newurl.pathres=Net::HTTP.start(url.host,url.port)do|http|http.requestreq,foo:1endresend这是RSpec:let(:uri){'http://example.com'}specify'HTTPcall'dohttp=mock:httpNet::HTTP.stub!(:start).and_yieldhttphttp.shou
Ⅰ软件测试基础一、软件测试基础理论1、软件测试的必要性所有的产品或者服务上线都需要测试2、测试的发展过程3、什么是软件测试找bug,发现缺陷4、测试的定义使用人工或自动的手段来运行或者测试某个系统的过程。目的在于检测它是否满足规定的需求。弄清预期结果和实际结果的差别。5、测试的目的以最小的人力、物力和时间找出软件中潜在的错误和缺陷6、测试的原则28原则:20%的主要功能要重点测(eg:支付宝的支付功能,其他功能都是次要的)80%的错误存在于20%的代码中7、测试标准8、测试的基本要求功能测试性能测试安全性测试兼容性测试易用性测试外观界面测试可靠性测试二、质量模型衡量一个优秀软件的维度①功能性功
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
假设我在Store的模型中有这个非常简单的方法:defgeocode_addressloc=Store.geocode(address)self.lat=loc.latself.lng=loc.lngend如果我想编写一些不受地理编码服务影响的测试脚本,这些脚本可能已关闭、有限制或取决于我的互联网连接,我该如何模拟地理编码服务?如果我可以将地理编码对象传递到该方法中,那将很容易,但我不知道在这种情况下该怎么做。谢谢!特里斯坦 最佳答案 使用内置模拟和stub的rspecs,你可以做这样的事情:setupdo@subject=MyCl
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我有一个gem,它有一个根据Rails.env的不同行为的方法:defself.envifdefined?(Rails)Rails.envelsif...现在我想编写一个规范来测试这个代码路径。目前我是这样做的:Kernel.const_set(:Rails,nil)Rails.should_receive(:env).and_return('production')...没关系,只是感觉很丑。另一种方法是在spec_helper中声明:moduleRails;end而且效果也很好。但也许有更好的方法?理想情况下,这应该有效:rails=double('Rails')rails.sho
我有一个rspec模拟对象,一个值赋给了属性。我正在努力在我的rspec测试中满足这种期望。只是想知道语法是什么?代码:defcreate@new_campaign=AdCampaign.new(params[:new_campaign])@new_campaign.creationDate="#{Time.now.year}/#{Time.now.mon}/#{Time.now.day}"if@new_campaign.saveflash[:status]="Success"elseflash[:status]="Failed"endend测试it"shouldabletocreat
我正在尝试测试命令行工具的输出。如何使用rspec来“伪造”命令行调用?执行以下操作不起作用:it"shouldcallthecommandlineandreturn'text'"do@p=Pig.new@p.should_receive(:run).with('my_command_line_tool_call').and_return('resulttext')end如何创建stub? 最佳答案 使用newmessageexpectationsyntax:规范/虚拟规范.rbrequire"dummy"describeDummy
网站的日志分析,是seo优化不可忽视的一门功课,但网站越大,每天产生的日志就越大,大站一天都可以产生几个G的网站日志,如果光靠肉眼去分析,那可能看到猴年马月都看不完,因此借助网站日志分析工具去分析网站日志,那将会使网站日志分析工作变得更简单。下面推荐两款网站日志分析软件。第一款:逆火网站日志分析器逆火网站日志分析器是一款功能全面的网站服务器日志分析软件。通过分析网站的日志文件,不仅能够精准的知道网站的访问量、网站的访问来源,网站的广告点击,访客的地区统计,搜索引擎关键字查询等,还能够一次性分析多个网站的日志文件,让你轻松管理网站。逆火网站日志分析器下载地址:https://pan.baidu.
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L