文章目录
”怕什么真理无穷,进一寸有一寸的欢喜。”
——古月 适
本人大一小白一枚,参加了一个本科生科研项目,目前正在学习一些ROS1相关的一些前置基础知识。
在这里以博客的形式记录一下学习的过程、操作的细节及操作的结果、爬坑方法、听课笔记。
希望能给同样在学习相关知识的小伙伴一些问题解决的参考以及学习之路的陪伴。
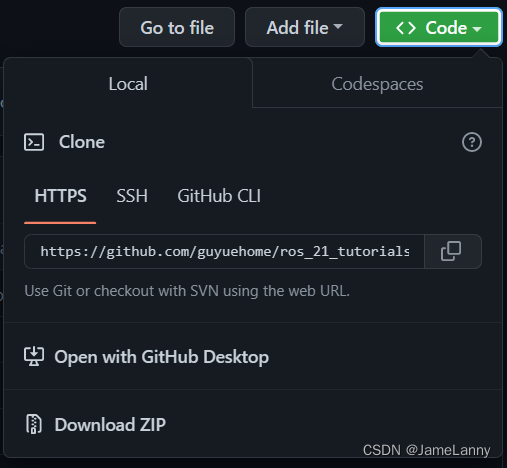
我是基本按照导师推荐的B站上古月居的《ROS入门21讲》(ROS1)走的
本博客也是按照学习顺序的笔记
老师的课程使用的是Ubuntu18.04,ROS melodic
我用的是Ubuntu20.04,ROS noetic
由于都是ROS1,所以原理和操作相同
先下载VMware
然后建议上某宝安装想要的ubuntu和ros
(推荐 大熊一加一)
此处含泪删除上千字搞机记录
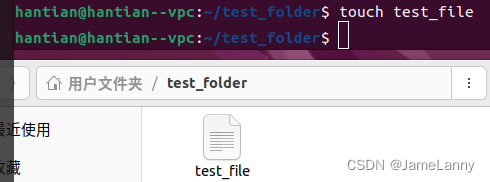
命令 选项 参数
command option parameter
之间都要加空格







但是没能够像老师一样简单地复制粘贴到虚拟机。
最后呢,关掉虚拟机改了一个虚拟机设置,把硬件CD/DCD里面,使用ISO文件改成了使用物理驱动器自动检测。(不知道这一步有没有作用)
后面还是拖不动下载的文件夹。但是大文件夹里面的linux文件夹可以拖进虚拟机。我试了一下另一个下面有子目录的文件夹,也是可以拖进去的。或许是因为大文件夹太大了?我不知道。拖到桌面,出现奇怪东东,不明白。(后来重启虚拟机之后消失了)
啊这,我成功吧教学文件夹拖进虚拟机了。方法是什么呢?。。。把文件夹名字改短。。。
我又把里面的文件夹拖到桌面,再把原空白目录删除。这一波下来和老师的直接拖动效果一样了,不失为一种办法。
下面开始编译和运行cpp for 循环的文件。
g++ c++_for.cpp -o c++_for
./c++_for
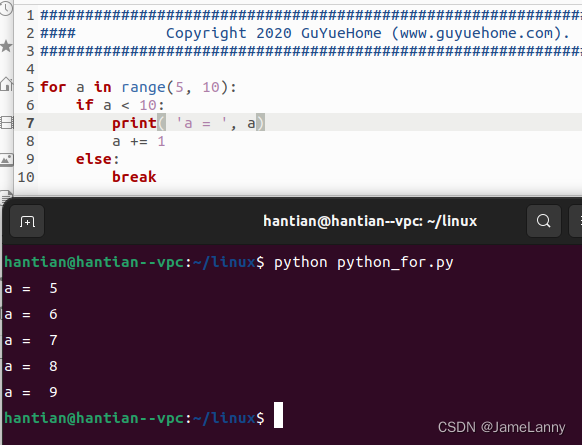
python不用编译,直接用
结果寄,SyntaxError: Missing parentheses in call to ‘print‘
记得我之前安装python编译器的时候有过改动,大概偏差出在那里。
于是我进python文件修改了一下语法(print改为print()),与胡老师课件上有一点点不同,运行成功。
再运行cpp while程序,连按多次方向上键,调出前前条命令。
做了一件小事,在虚拟机上安装了IDE。关于我决定在虚拟机上学编程这件事,原因一是新鲜感多一些,二是有一位计算机大佬朋友就是这么做的。据说有一些指令会很方便。在虚拟机上安装IDE的时候,我在clion和VScode两者之间还纠结了一阵,最终选择了后者。一方面是之前使用了一段时间clion体验不佳,让我满意的只是图表和页面比较好看;另一方面是听说VS的功能比较强大,甚至可以和人工智能ChatGPT交流,爱了爱了。安装的过程和结果也很干净,期待接下来的学习。
省流:上某宝
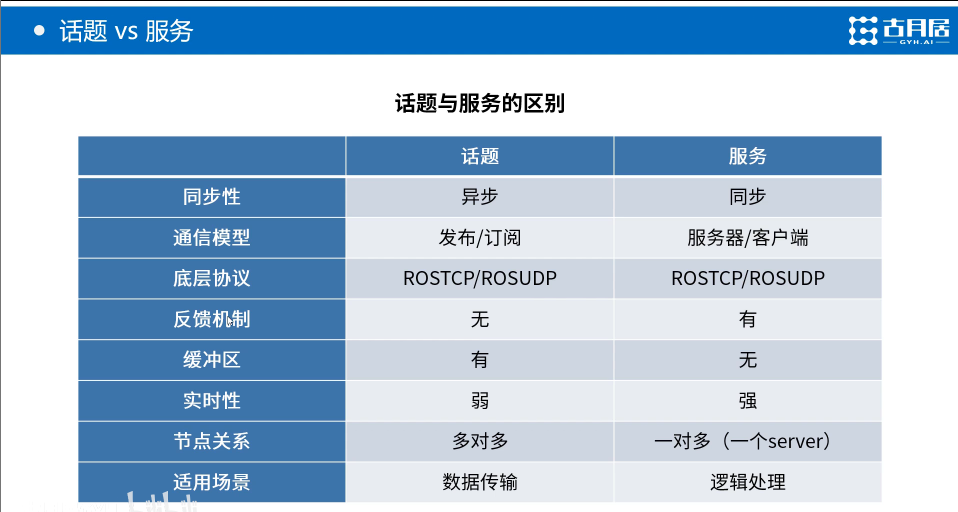
提高机器人研发中的软件复用率
学习过程中建议用谷歌搜索,搜到wiki的网站
(ROSwiki是记录ROS信息文档的主要论坛)
(开始实操)
键盘突然在虚拟机用不了了。有效解决方案
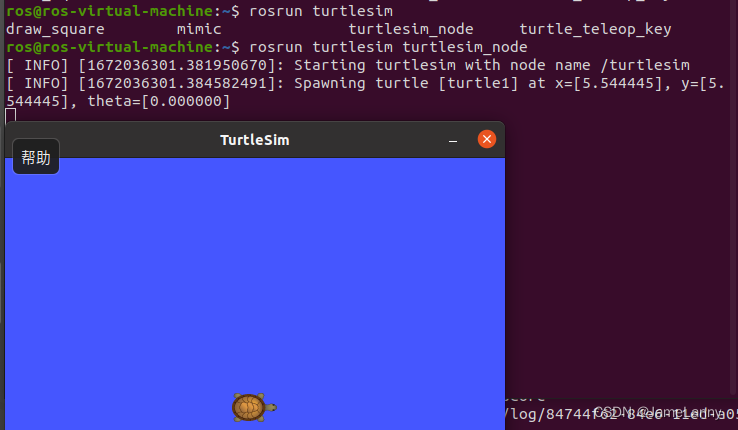
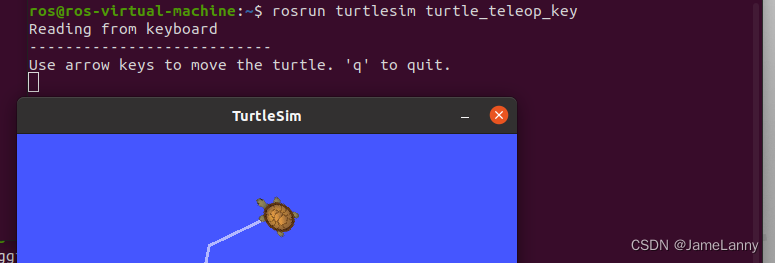
rosrun

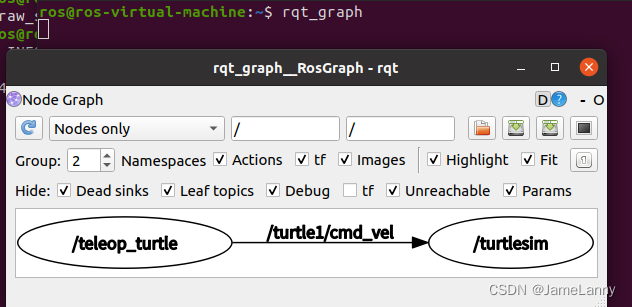
rqt_graph
rosnode

rosnode info /turtlesim
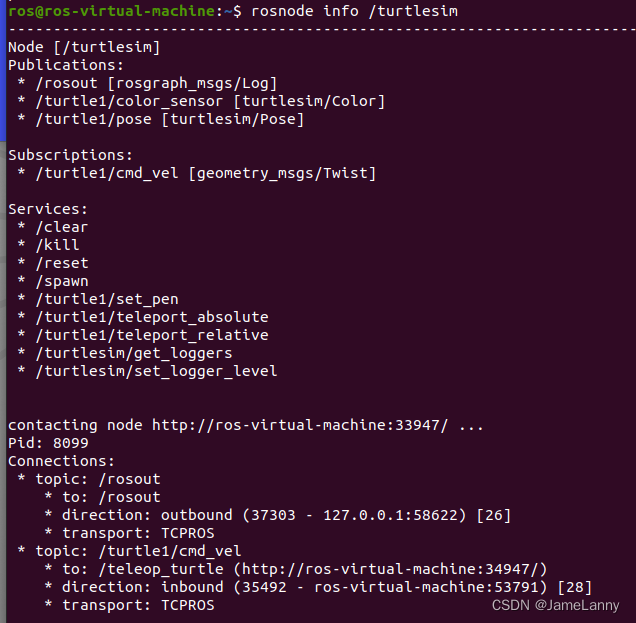
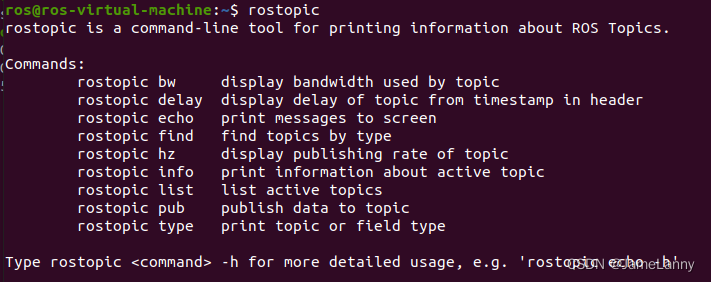
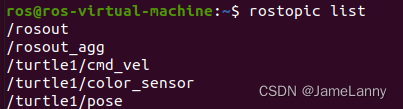
rostopic
看到下面的cmd_vel就是刚才就是键盘控制节点和海龟仿真器节点通讯的话题
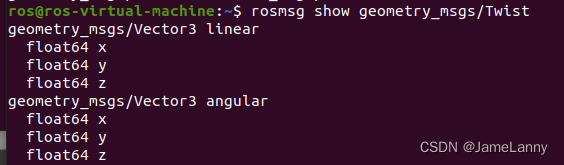
学会使用tab, 这里输入消息类型的时候还要连按两次tab
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
注意这里线速度的单位是米每秒,角速度单位弧度每秒)
在调具体数据的时候,移动光标只可以用左右方向键(用上下是会调出历史命令)


看到小海龟向左前方45度移动了一小段
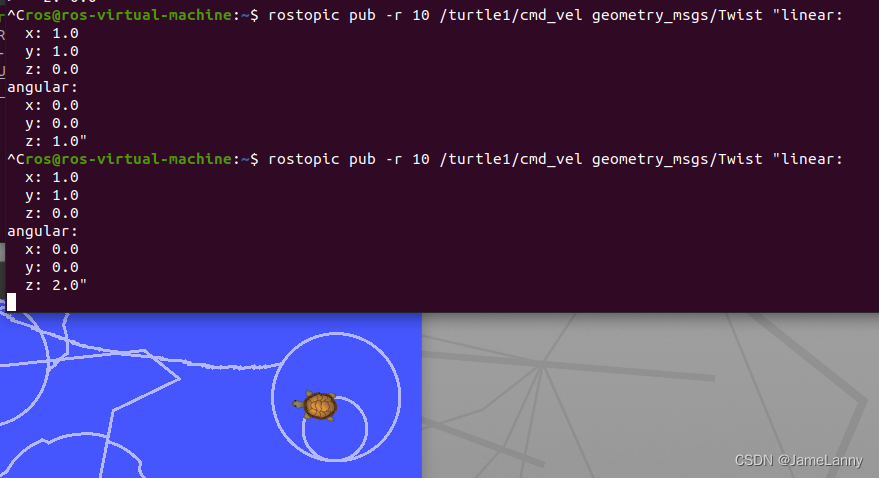
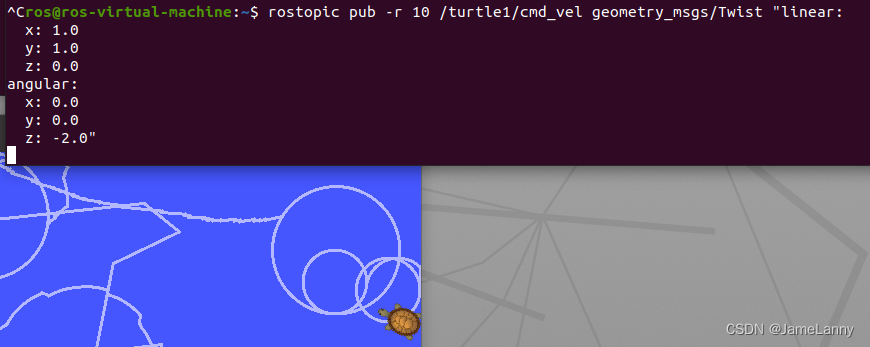
想让小海龟连续移动
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
> x: 1.0
> y: 1.0
> z: 0.0
> angular:
> x: 0.0
> y: 0.0
> z: 0.0"

调angular的z调旋转
看到方向和角速度都是可以调的
圆圈的半径也符合速度和角速度的计算
在前面加负号也有意义
rosmsg
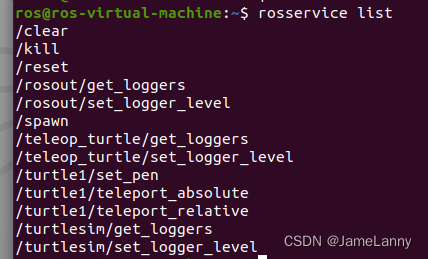
rosservice
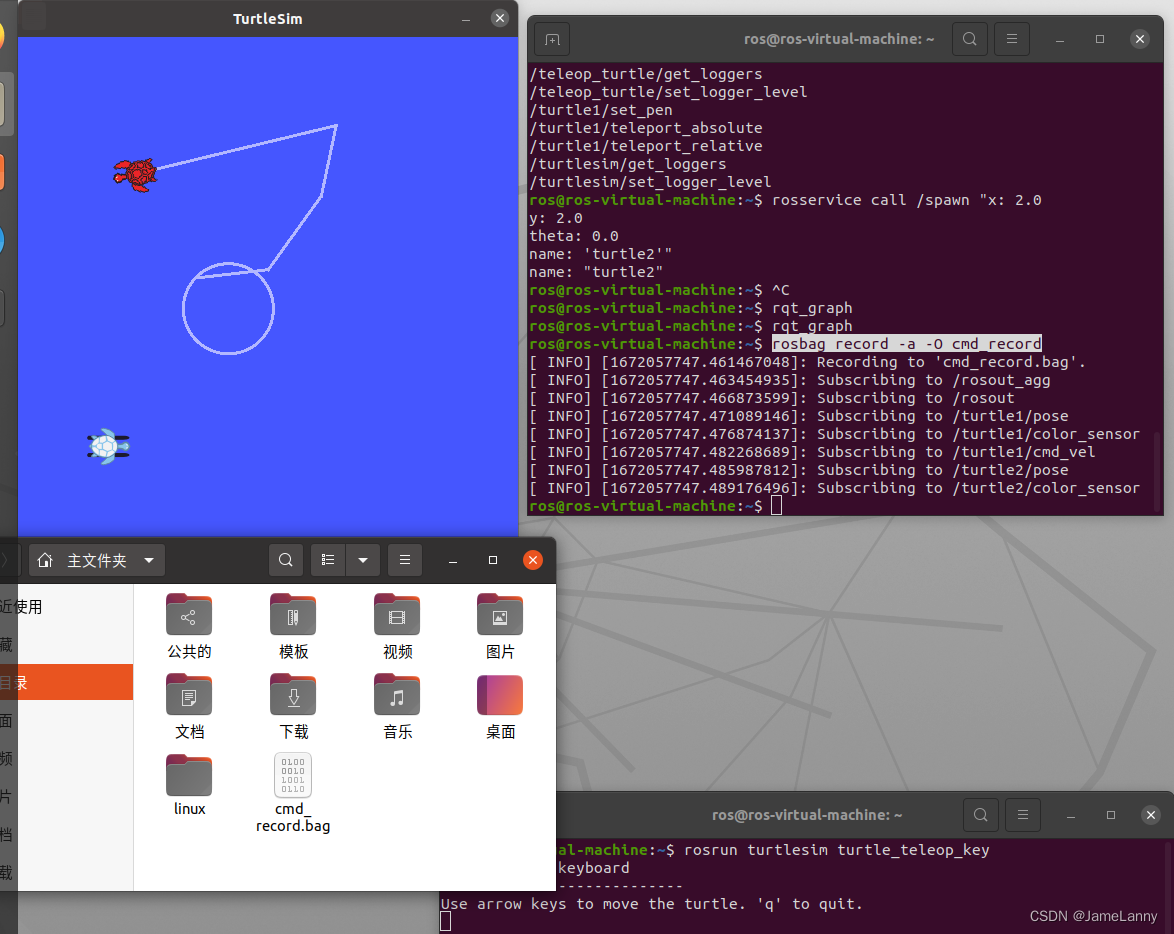
rosservice call /spawn "x: 2.0
y: 2.0
theta: 0.0
name: 'turtle2'"

可以看到是有一个反馈的(反馈信息name: “turtle2”)

rosbag record -a -O cmd_record看到了订阅的话题
随便让海龟动几下
结束之后在终端ctrl+c
默认保存到了主文件夹
从回车之后就开始记录了,包括没有操作的等待时间
rosbag play cmd_record.bag 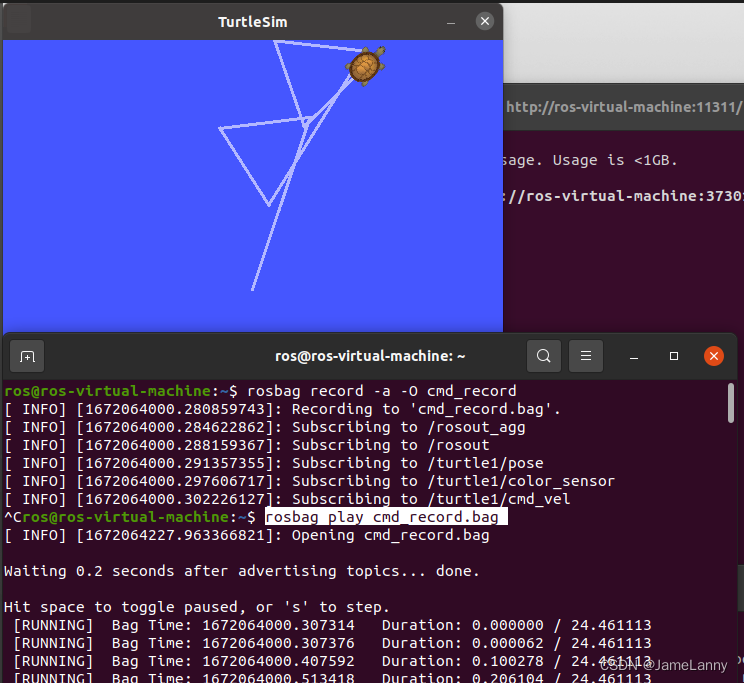
放一张老师课件截图:
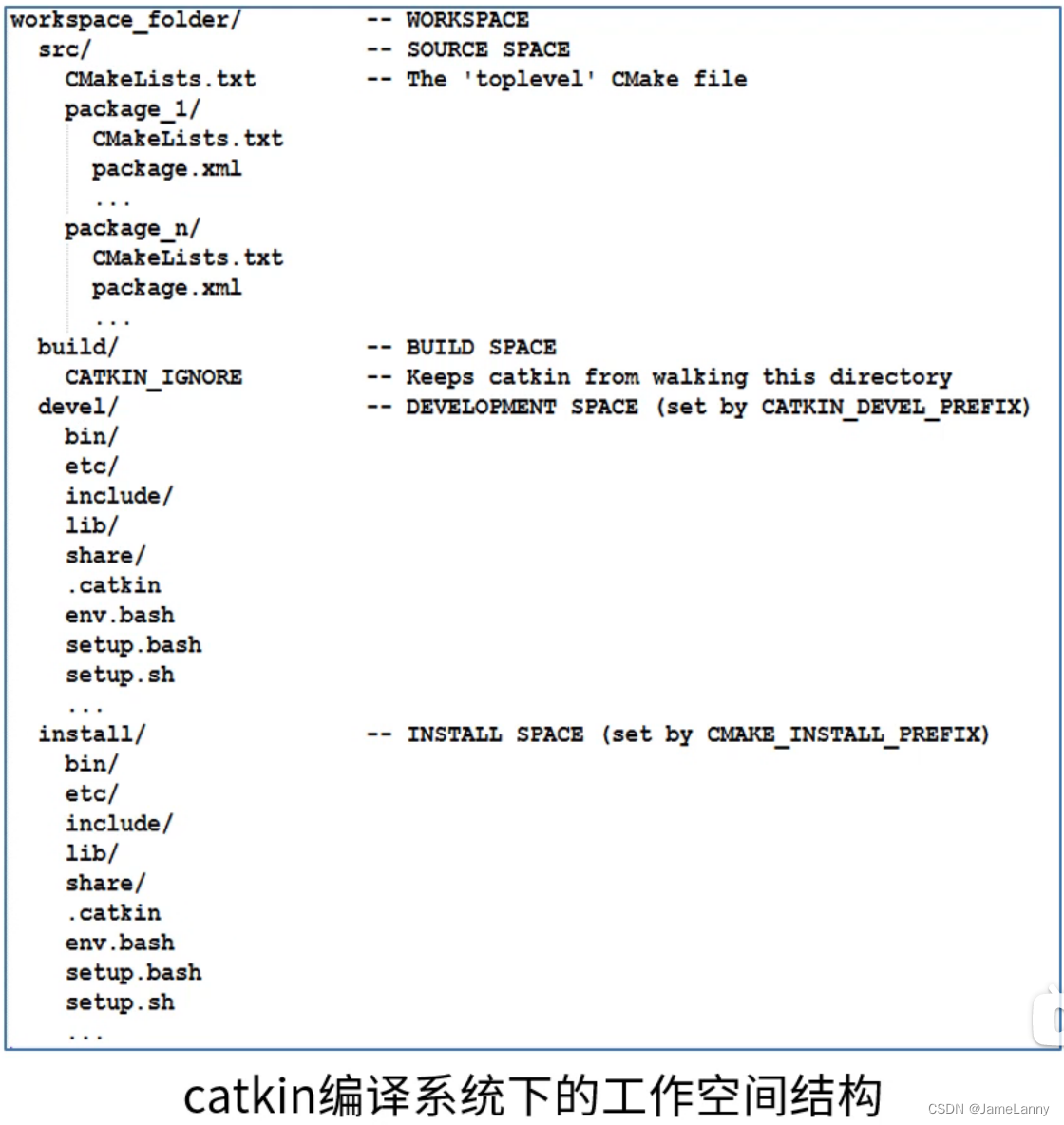
overview:
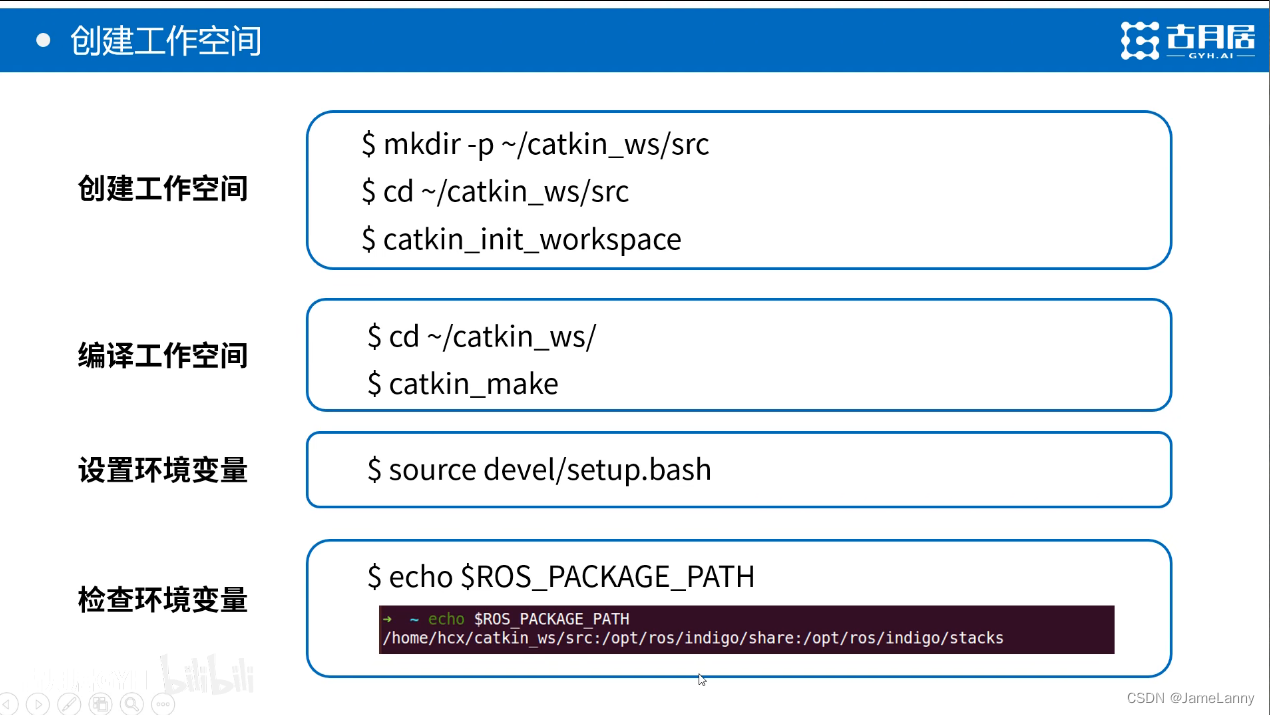
operation:
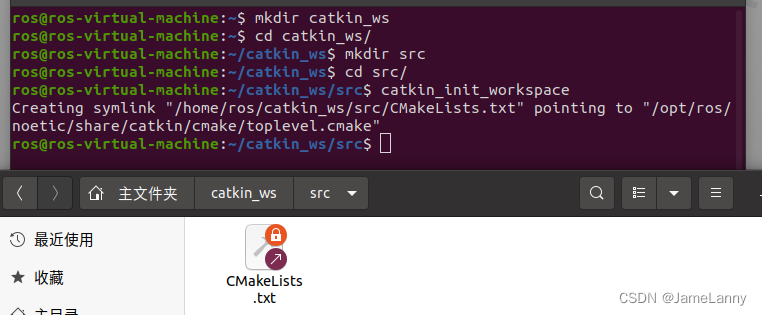
catkin_init_workspace //初始化工作空间(属性变化),看到冒出了CMakeLists.txt
catkin_make 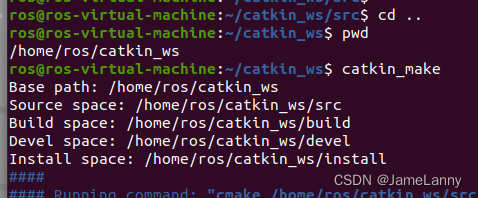

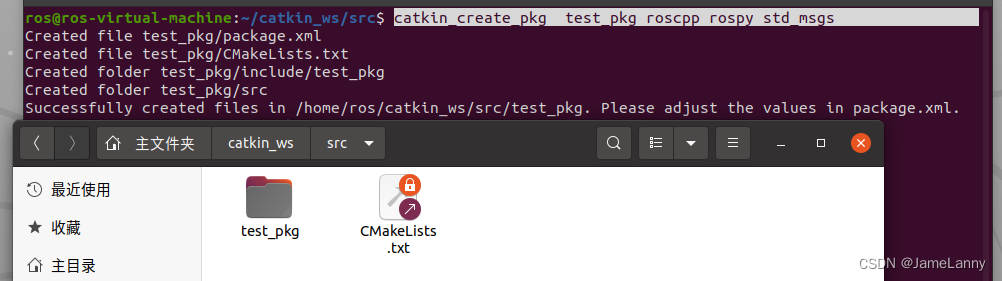
创建功能包:
(要放在src里面):

命令 功能包名 依赖1 依赖2 依赖3:
catkin_create_pkg test_pkg roscpp rospy std_msgs
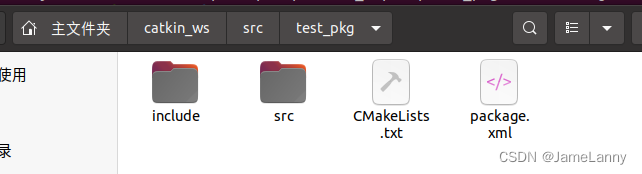
打开功能包:
include放置头文件
src放代码
后面两个文件是功能包一定有的,使其区别于普通文件夹的属性
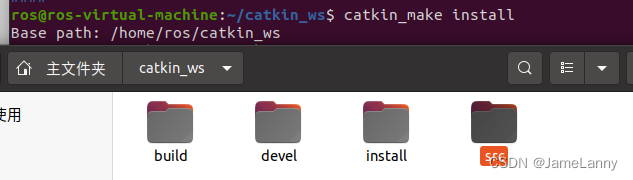
编译功能包
还是先回到catkin_ws
编译工作空间就行了
因为没有代码所以也没有实际效果

要运行功能包里某一个程序的话,要先设置一下工作空间的环境变量
设置之后系统才能找到工作空间
设置环境变量:
ros@ros-virtual-machine:~/catkin_ws$ source devel/setup.bash

检查环境变量
ros@ros-virtual-machine:~/catkin_ws$ echo $ROS_PACKAGE_PATH
/home/ros/catkin_ws/src:/opt/ros/noetic/share
有点不懂了,贴一下chatGPT的解释
小结:
1. 设置要编译的代码和生成的可执行文件
2. 设置链接库
3. 添加依赖项
cd到代码空间,创建功能包
编写C++代码, 配置编译规则
cd到工作空间,编译,配置环境变量
打开roscore, 运行海龟仿真节点,运行客户端节点
编写C++代码, 配置编译规则
cd到工作空间,编译,配置环境变量
打开roscore, 运行海龟仿真节点,运行服务端节点
$ rosservice call /turtle_command"{}" 发布消息
1. 设置要编译的代码和生成的可执行文件 2. 设置链接库 3. 添加依赖项
这周主要是复现的古月居老师课程里的代码实现环节
不求背住每一个细节和命令
需要达到的目标是当需要某个功能的时候能够想到在哪里,对着老师的课件实现自己想要的功能
注意:
命令行和cmakelist里面的语句不要少了空格
注意第11节第6页有一个错误,rosrun里面应该是pose_publisher

运行python的时候记得改成python3的语法
运行phthon文件的命令在11讲里有
有什么好说的呢,出错的地方跟着弹幕大佬改就好了
这里可以调整文本格式,达到高亮效果
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
@作者:SYFStrive @博客首页:HomePage📜:微信小程序📌:个人社区(欢迎大佬们加入)👉:社区链接🔗📌:觉得文章不错可以点点关注👉:专栏连接🔗💃:感谢支持,学累了可以先看小段由小胖给大家带来的街舞👉微信小程序(🔥)目录自定义组件-behaviors 1、什么是behaviors 2、behaviors的工作方式 3、创建behavior 4、导入并使用behavior 5、behavior中所有可用的节点 6、同名字段的覆盖和组合规则总结最后自定义组件-behaviors 1、什么是behaviorsbehaviors是小程序中,用于实现
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
ES一、简介1、ElasticStackES技术栈:ElasticSearch:存数据+搜索;QL;Kibana:Web可视化平台,分析。LogStash:日志收集,Log4j:产生日志;log.info(xxx)。。。。使用场景:metrics:指标监控…2、基本概念Index(索引)动词:保存(插入)名词:类似MySQL数据库,给数据Type(类型)已废弃,以前类似MySQL的表现在用索引对数据分类Document(文档)真正要保存的一个JSON数据{name:"tcx"}二、入门实战{"name":"DESKTOP-1TSVGKG","cluster_name":"elasticsear
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
原始问题Letd(n)bedefinedasthesumofproperdivisorsofn(numberslessthannwhichdivideevenlyinton).Ifd(a)=bandd(b)=a,whereab,thenaandbareanamicablepairandeachofaandbarecalledamicablenumbers.Forexample,theproperdivisorsof220are1,2,4,5,10,11,20,22,44,55and110;therefored(220)=284.Theproperdivisorsof284are1,2,
如何学习ruby的正则表达式?(对于假人) 最佳答案 http://www.rubular.com/在Ruby中使用正则表达式时是一个很棒的工具,因为它可以立即将结果可视化。 关于ruby-我如何学习ruby的正则表达式?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/1881231/
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG