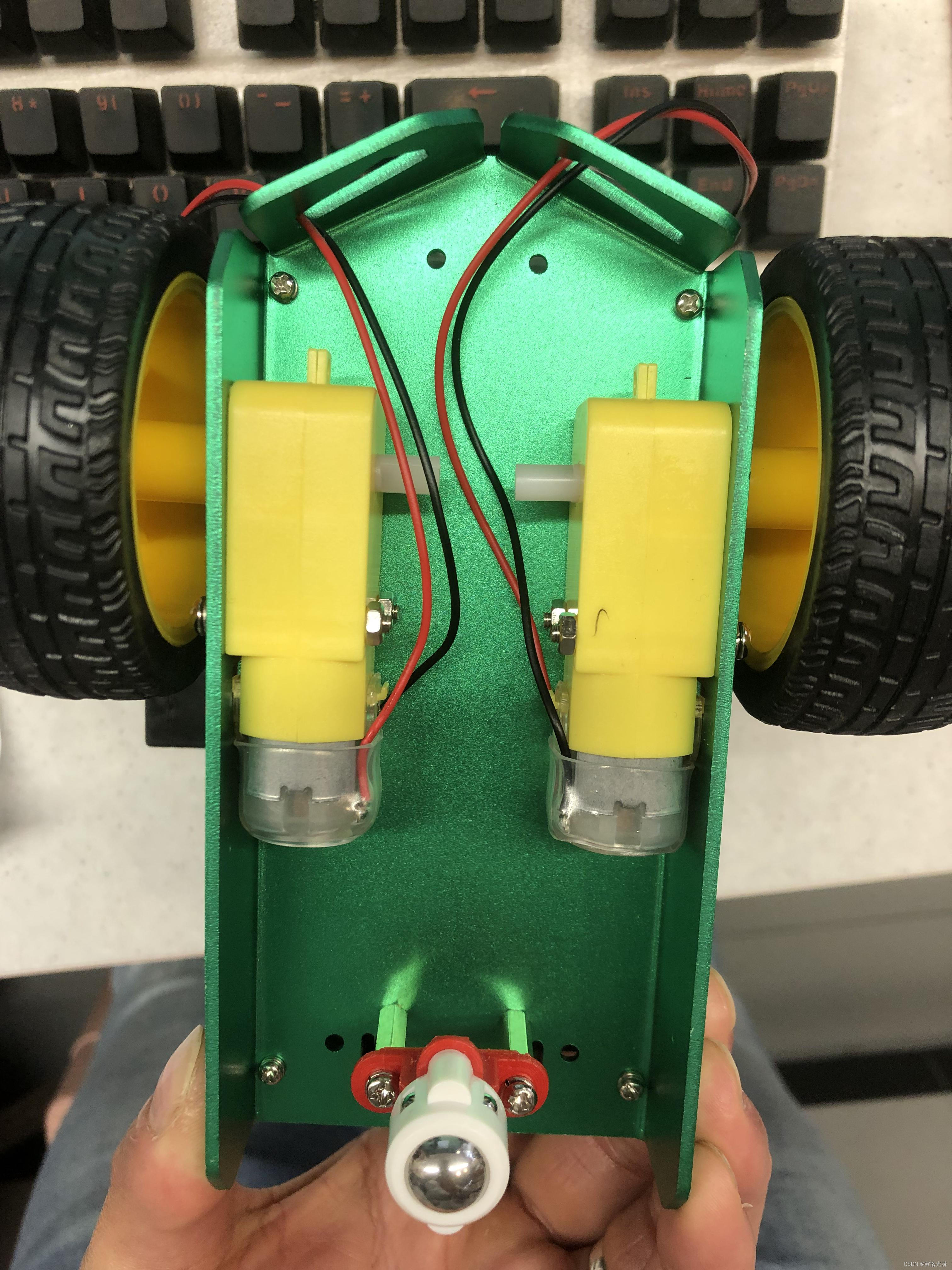
基于Jetson Nano板子搭建一个无人车,少不了减速电机驱动轮子滚动,那如何驱动呢?
从Jetson.GPIO库文件来说,里面没有支持产生PWM的引脚,也就意味着Jetson nano没有硬件产生PWM的能力,所以我们不得不使用别的方法产生PWM完成驱动控制,而刚好STM8解决了这一问题并且节约了它有限的GPIO资源,我们借助STM8这款MCU作为协处理器,大大增强了Jetson nano的驱动能力,PWM的周期和占空比(在一个脉冲循环内,通电时间相对于总时间所占的比例)都完全可控。
我们来看下它的参数:
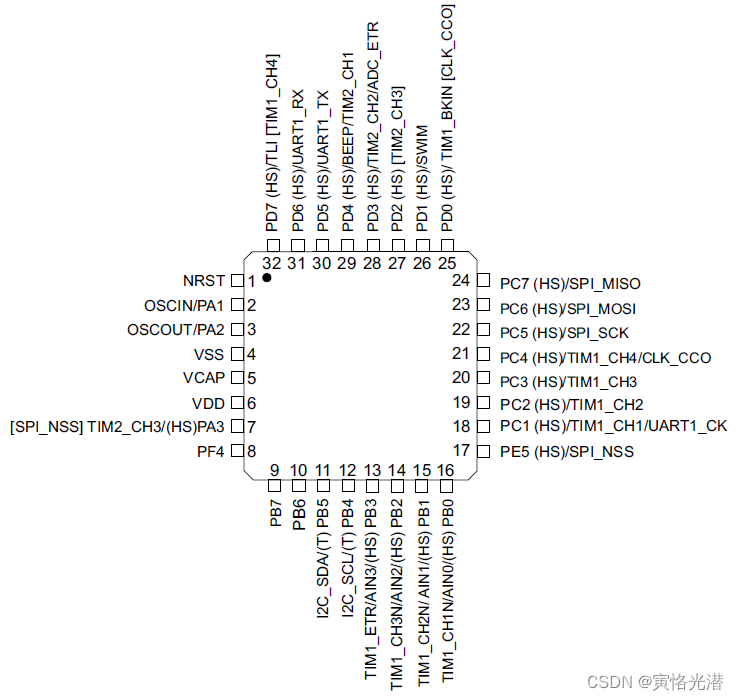
我们使用的是上图所示的QFN20封装的STM8,它主要参数特征如下:
1. I2C接口,支持多路PWM输出
2. 内置16MHz晶振,可不连接外部晶振,也可以连接外部晶振
3. 支持2.95V-5.5V电压,最大耐压值5.5V
4. 具有上电复位,以及软件复位等功能

由上图三极管驱动的有源蜂鸣器电路,而三极管控制引脚接在协处理器可知,开启蜂鸣器只需要通过IIC给协处理器对应的指令即可,下面我们看到通讯协议:

在上一篇文章我们演示的蜂鸣器,我们通过IIC向协处理器(地址0x1B)的寄存器0x06发送1即可打开蜂鸣器,发送0即关闭蜂鸣器
bus.write_byte_data(0x1B,0x06,1或0)
同样的给出两路电机的电路图:
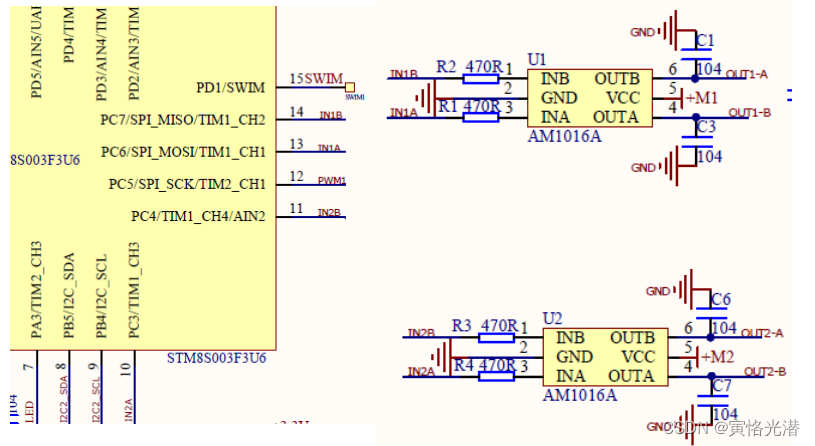
我们来实际驱动电机看下,这里电机控制部分用到了Jetbotmini的库:
from jetbotmini import Robot
import time
robot = Robot()print(dir(robot))
#['__class__', '__delattr__', '__dict__', '__dir__', '__doc__', '__eq__', '__format__', '__ge__', '__getattribute__', '__getstate__', '__gt__', '__hash__', '__init__', '__init_subclass__', '__le__', '__lt__', '__module__', '__ne__', '__new__', '__reduce__', '__reduce_ex__', '__repr__', '__setattr__', '__setstate__', '__sizeof__', '__str__', '__subclasshook__', '__weakref__', '_add_notifiers', '_config_changed', '_cross_validation_lock', '_find_my_config', '_instance', '_load_config', '_log_default', '_notify_trait', '_register_validator', '_remove_notifiers', '_trait_default_generators', '_trait_notifiers', '_trait_validators', '_trait_values', '_walk_mro', 'add_traits', 'backward', 'class_config_rst_doc', 'class_config_section', 'class_get_help', 'class_get_trait_help', 'class_own_trait_events', 'class_own_traits', 'class_print_help', 'class_trait_names', 'class_traits', 'clear_instance', 'config', 'cross_validation_lock', 'forward', 'has_trait', 'hold_trait_notifications', 'i2c_bus', 'initialized', 'instance', 'left', 'left_motor', 'left_motor_alpha', 'left_motor_channel', 'log', 'motor_driver', 'notify_change', 'observe', 'on_trait_change', 'parent', 'right', 'right_motor', 'right_motor_alpha', 'right_motor_channel', 'section_names', 'set_motors', 'set_trait', 'setup_instance', 'stop', 'trait_events', 'trait_metadata', 'trait_names', 'traits', 'unobserve', 'unobserve_all', 'update_config']print(dir(robot.left_motor))
#['__class__', '__delattr__', '__dict__', '__dir__', '__doc__', '__eq__', '__format__', '__ge__', '__getattribute__', '__getstate__', '__gt__', '__hash__', '__init__', '__init_subclass__', '__le__', '__lt__', '__module__', '__ne__', '__new__', '__reduce__', '__reduce_ex__', '__repr__', '__setattr__', '__setstate__', '__sizeof__', '__str__', '__subclasshook__', '__weakref__', '_add_notifiers', '_config_changed', '_cross_validation_lock', '_driver', '_find_my_config', '_load_config', '_motor', '_notify_trait', '_observe_value', '_register_validator', '_release', '_remove_notifiers', '_trait_default_generators', '_trait_notifiers', '_trait_validators', '_trait_values', '_write_value', 'add_traits', 'alpha', 'beta', 'class_config_rst_doc', 'class_config_section', 'class_get_help', 'class_get_trait_help', 'class_own_trait_events', 'class_own_traits', 'class_print_help', 'class_trait_names', 'class_traits', 'config', 'cross_validation_lock', 'has_trait', 'hold_trait_notifications', 'notify_change', 'observe', 'on_trait_change', 'parent', 'section_names', 'set_trait', 'setup_instance', 'trait_events', 'trait_metadata', 'trait_names', 'traits', 'unobserve', 'unobserve_all', 'update_config', 'value']#这个转速的范围是[0,1],不过我设置成0.1也没有转,设置成0.2及以上才转,不知道是不是电量不是很足的原因了。
robot.left_motor.value = 0.8
robot.right_motor.value = 0.8
#这样就可以让电机转动了,很简单,然后做停止电机的操作
robot.left_motor.value = 0
robot.right_motor.value = 0
#或者直接将robot停止也可以
#robot.stop()这段赋值左右马达的意思就是,控制电机速度的值的范围是0~1.0,即代表给出的PWM的占空比为0~100%,所以赋值为0,就是把输出给电机的PWM占空比设置为0,这样就关闭了电机
更多的robot实例方法可以自行查阅源码:
Help on Robot in module jetbotmini.robot object:
class Robot(traitlets.config.configurable.SingletonConfigurable)
| A configurable that only allows one instance.
|
| This class is for classes that should only have one instance of itself
| or *any* subclass. To create and retrieve such a class use the
| :meth:`SingletonConfigurable.instance` method.
|
| Method resolution order:
| Robot
| traitlets.config.configurable.SingletonConfigurable
| traitlets.config.configurable.LoggingConfigurable
| traitlets.config.configurable.Configurable
| traitlets.traitlets.HasTraits
| traitlets.traitlets.HasDescriptors
| builtins.object
|
| Methods defined here:
|
| __init__(self, *args, **kwargs)
| Create a configurable given a config config.
|
| Parameters
| ----------
| config : Config
| If this is empty, default values are used. If config is a
| :class:`Config` instance, it will be used to configure the
| instance.
| parent : Configurable instance, optional
| The parent Configurable instance of this object.
|
| Notes
| -----
| Subclasses of Configurable must call the :meth:`__init__` method of
| :class:`Configurable` *before* doing anything else and using
| :func:`super`::
|
| class MyConfigurable(Configurable):
| def __init__(self, config=None):
| super(MyConfigurable, self).__init__(config=config)
| # Then any other code you need to finish initialization.
|
| This ensures that instances will be configured properly.
|
| backward(self, speed=1.0)
|
| forward(self, speed=1.0, duration=None)
|
| left(self, speed=1.0)
|
| right(self, speed=1.0)
|
| set_motors(self, left_speed, right_speed)
|
| stop(self)
|
| ----------------------------------------------------------------------
| Data descriptors defined here:
|
| i2c_bus
| An int trait.
|
| left_motor
| A trait whose value must be an instance of a specified class.
|
| The value can also be an instance of a subclass of the specified class.
|
| Subclasses can declare default classes by overriding the klass attribute
|
| left_motor_alpha
| A float trait.
|
| left_motor_channel
| An int trait.
|
| right_motor
| A trait whose value must be an instance of a specified class.
|
| The value can also be an instance of a subclass of the specified class.
|
| Subclasses can declare default classes by overriding the klass attribute
|
| right_motor_alpha
| A float trait.
|
| right_motor_channel
| An int trait.
|
| ----------------------------------------------------------------------
| Class methods inherited from traitlets.config.configurable.SingletonConfigurable:
|
| clear_instance() from traitlets.traitlets.MetaHasTraits
| unset _instance for this class and singleton parents.
|
| initialized() from traitlets.traitlets.MetaHasTraits
| Has an instance been created?
|
| instance(*args, **kwargs) from traitlets.traitlets.MetaHasTraits
| Returns a global instance of this class.
|
| This method create a new instance if none have previously been created
| and returns a previously created instance is one already exists.
|
| The arguments and keyword arguments passed to this method are passed
| on to the :meth:`__init__` method of the class upon instantiation.
|
| Examples
| --------
|
| Create a singleton class using instance, and retrieve it::
|
| >>> from traitlets.config.configurable import SingletonConfigurable
| >>> class Foo(SingletonConfigurable): pass
| >>> foo = Foo.instance()
| >>> foo == Foo.instance()
| True
|
| Create a subclass that is retrived using the base class instance::
|
| >>> class Bar(SingletonConfigurable): pass
| >>> class Bam(Bar): pass
| >>> bam = Bam.instance()
| >>> bam == Bar.instance()
| True
|
| ----------------------------------------------------------------------
| Data descriptors inherited from traitlets.config.configurable.LoggingConfigurable:
|
| log
| A trait whose value must be an instance of a specified class.
|
| The value can also be an instance of a subclass of the specified class.
|
| Subclasses can declare default classes by overriding the klass attribute
|
| ----------------------------------------------------------------------
| Methods inherited from traitlets.config.configurable.Configurable:
|
| update_config(self, config)
| Update config and load the new values
|
| ----------------------------------------------------------------------
| Class methods inherited from traitlets.config.configurable.Configurable:
|
| class_config_rst_doc() from traitlets.traitlets.MetaHasTraits
| Generate rST documentation for this class' config options.
|
| Excludes traits defined on parent classes.
|
| class_config_section() from traitlets.traitlets.MetaHasTraits
| Get the config class config section
|
| class_get_help(inst=None) from traitlets.traitlets.MetaHasTraits
| Get the help string for this class in ReST format.
|
| If `inst` is given, it's current trait values will be used in place of
| class defaults.
|
| class_get_trait_help(trait, inst=None) from traitlets.traitlets.MetaHasTraits
| Get the help string for a single trait.
|
| If `inst` is given, it's current trait values will be used in place of
| the class default.
|
| class_print_help(inst=None) from traitlets.traitlets.MetaHasTraits
| Get the help string for a single trait and print it.
|
| section_names() from traitlets.traitlets.MetaHasTraits
| return section names as a list
|
| ----------------------------------------------------------------------
| Data descriptors inherited from traitlets.config.configurable.Configurable:
|
| config
| A trait whose value must be an instance of a specified class.
|
| The value can also be an instance of a subclass of the specified class.
|
| Subclasses can declare default classes by overriding the klass attribute
|
| parent
| A trait whose value must be an instance of a specified class.
|
| The value can also be an instance of a subclass of the specified class.
|
| Subclasses can declare default classes by overriding the klass attribute
|
| ----------------------------------------------------------------------
| Methods inherited from traitlets.traitlets.HasTraits:
|
| __getstate__(self)
|
| __setstate__(self, state)
|
| add_traits(self, **traits)
| Dynamically add trait attributes to the HasTraits instance.
|
| has_trait(self, name)
| Returns True if the object has a trait with the specified name.
|
| hold_trait_notifications(self)
| Context manager for bundling trait change notifications and cross
| validation.
|
| Use this when doing multiple trait assignments (init, config), to avoid
| race conditions in trait notifiers requesting other trait values.
| All trait notifications will fire after all values have been assigned.
|
| notify_change(self, change)
|
| observe(self, handler, names=traitlets.All, type='change')
| Setup a handler to be called when a trait changes.
|
| This is used to setup dynamic notifications of trait changes.
|
| Parameters
| ----------
| handler : callable
| A callable that is called when a trait changes. Its
| signature should be ``handler(change)``, where ``change`` is a
| dictionary. The change dictionary at least holds a 'type' key.
| * ``type``: the type of notification.
| Other keys may be passed depending on the value of 'type'. In the
| case where type is 'change', we also have the following keys:
| * ``owner`` : the HasTraits instance
| * ``old`` : the old value of the modified trait attribute
| * ``new`` : the new value of the modified trait attribute
| * ``name`` : the name of the modified trait attribute.
| names : list, str, All
| If names is All, the handler will apply to all traits. If a list
| of str, handler will apply to all names in the list. If a
| str, the handler will apply just to that name.
| type : str, All (default: 'change')
| The type of notification to filter by. If equal to All, then all
| notifications are passed to the observe handler.
|
| on_trait_change(self, handler=None, name=None, remove=False)
| DEPRECATED: Setup a handler to be called when a trait changes.
|
| This is used to setup dynamic notifications of trait changes.
|
| Static handlers can be created by creating methods on a HasTraits
| subclass with the naming convention '_[traitname]_changed'. Thus,
| to create static handler for the trait 'a', create the method
| _a_changed(self, name, old, new) (fewer arguments can be used, see
| below).
|
| If `remove` is True and `handler` is not specified, all change
| handlers for the specified name are uninstalled.
|
| Parameters
| ----------
| handler : callable, None
| A callable that is called when a trait changes. Its
| signature can be handler(), handler(name), handler(name, new),
| handler(name, old, new), or handler(name, old, new, self).
| name : list, str, None
| If None, the handler will apply to all traits. If a list
| of str, handler will apply to all names in the list. If a
| str, the handler will apply just to that name.
| remove : bool
| If False (the default), then install the handler. If True
| then unintall it.
|
| set_trait(self, name, value)
| Forcibly sets trait attribute, including read-only attributes.
|
| setup_instance(self, *args, **kwargs)
| This is called **before** self.__init__ is called.
|
| trait_metadata(self, traitname, key, default=None)
| Get metadata values for trait by key.
|
| trait_names(self, **metadata)
| Get a list of all the names of this class' traits.
|
| traits(self, **metadata)
| Get a ``dict`` of all the traits of this class. The dictionary
| is keyed on the name and the values are the TraitType objects.
|
| The TraitTypes returned don't know anything about the values
| that the various HasTrait's instances are holding.
|
| The metadata kwargs allow functions to be passed in which
| filter traits based on metadata values. The functions should
| take a single value as an argument and return a boolean. If
| any function returns False, then the trait is not included in
| the output. If a metadata key doesn't exist, None will be passed
| to the function.
|
| unobserve(self, handler, names=traitlets.All, type='change')
| Remove a trait change handler.
|
| This is used to unregister handlers to trait change notifications.
|
| Parameters
| ----------
| handler : callable
| The callable called when a trait attribute changes.
| names : list, str, All (default: All)
| The names of the traits for which the specified handler should be
| uninstalled. If names is All, the specified handler is uninstalled
| from the list of notifiers corresponding to all changes.
| type : str or All (default: 'change')
| The type of notification to filter by. If All, the specified handler
| is uninstalled from the list of notifiers corresponding to all types.
|
| unobserve_all(self, name=traitlets.All)
| Remove trait change handlers of any type for the specified name.
| If name is not specified, removes all trait notifiers.
|
| ----------------------------------------------------------------------
| Class methods inherited from traitlets.traitlets.HasTraits:
|
| class_own_trait_events(name) from traitlets.traitlets.MetaHasTraits
| Get a dict of all event handlers defined on this class, not a parent.
|
| Works like ``event_handlers``, except for excluding traits from parents.
|
| class_own_traits(**metadata) from traitlets.traitlets.MetaHasTraits
| Get a dict of all the traitlets defined on this class, not a parent.
|
| Works like `class_traits`, except for excluding traits from parents.
|
| class_trait_names(**metadata) from traitlets.traitlets.MetaHasTraits
| Get a list of all the names of this class' traits.
|
| This method is just like the :meth:`trait_names` method,
| but is unbound.
|
| class_traits(**metadata) from traitlets.traitlets.MetaHasTraits
| Get a ``dict`` of all the traits of this class. The dictionary
| is keyed on the name and the values are the TraitType objects.
|
| This method is just like the :meth:`traits` method, but is unbound.
|
| The TraitTypes returned don't know anything about the values
| that the various HasTrait's instances are holding.
|
| The metadata kwargs allow functions to be passed in which
| filter traits based on metadata values. The functions should
| take a single value as an argument and return a boolean. If
| any function returns False, then the trait is not included in
| the output. If a metadata key doesn't exist, None will be passed
| to the function.
|
| trait_events(name=None) from traitlets.traitlets.MetaHasTraits
| Get a ``dict`` of all the event handlers of this class.
|
| Parameters
| ----------
| name: str (default: None)
| The name of a trait of this class. If name is ``None`` then all
| the event handlers of this class will be returned instead.
|
| Returns
| -------
| The event handlers associated with a trait name, or all event handlers.
|
| ----------------------------------------------------------------------
| Data descriptors inherited from traitlets.traitlets.HasTraits:
|
| cross_validation_lock
| A contextmanager for running a block with our cross validation lock set
| to True.
|
| At the end of the block, the lock's value is restored to its value
| prior to entering the block.
|
| ----------------------------------------------------------------------
| Static methods inherited from traitlets.traitlets.HasDescriptors:
|
| __new__(cls, *args, **kwargs)
| Create and return a new object. See help(type) for accurate signature.
|
| ----------------------------------------------------------------------
| Data descriptors inherited from traitlets.traitlets.HasDescriptors:
|
| __dict__
| dictionary for instance variables (if defined)
|
| __weakref__
| list of weak references to the object (if defined)
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我使用的是最新版本的Chrome(32.0.1700.107)和Chrome驱动程序(V2.8)。但是当我在Ruby中使用以下代码运行示例测试时:require'selenium-webdriver'WAIT=Selenium::WebDriver::Wait.new(timeout:100)$driver=Selenium::WebDriver.for:chrome$driver.manage.window.maximize$driver.navigate.to'https://www.google.co.in'defapps_hoverele_hover=$driver.find_
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。多年来,我一直在使用多种语言进行编程,并且认为自己总体上相当擅长。但是,我从未编写过任何自动化测试:没有单元测试,没有TDD,没有BDD,什么都没有。我已经尝试开始为我的项目编写适当的测试套件。我可以看到在进行任何更改后能够自动测试项目中所有代码的理论值(value)。我可以看到像RSpec和Mocha这样的测试框架应该如何使设置和运行所述测试变得相当容易
我正在为在AmazonEC2实例上运行的应用程序设计一个AutoScaling系统。应用程序从SQS读取消息并对其进行处理。AutoScaling系统将监控两件事:SQS中的消息数量,所有EC2机器上运行的进程总数。例如,如果SQS中的消息数量超过3000,我希望系统自动缩放,创建一个新的EC2实例,在其上部署代码,当消息数量低于2000时,我希望系统终止EC2实例.我正在用Ruby和Capistrano做这件事。我的问题是:我无法找到一种方法来确定在所有EC2机器上运行的进程数并将该数字保存在变量中。你能帮帮我吗? 最佳答案 您可