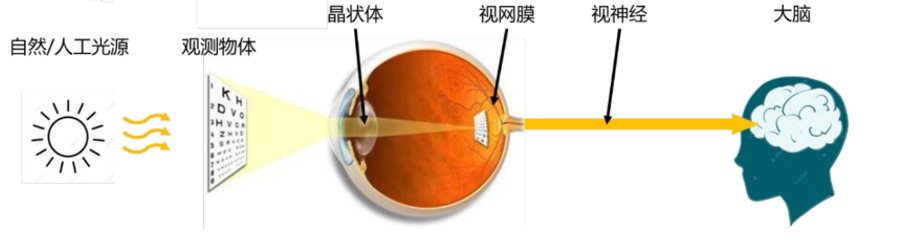
视觉系统的运作方式与你的视觉非常相似。你的眼睛是一个复杂的光学设备。它捕捉信息并将其发送到你的大脑,大脑对此有意义。
在机器视觉中,相机、灯光和镜头捕捉数据,并将数据发送到处理器,由视觉工具或算法进行解释。

固定光圈定焦镜头
镜头只有一个可以手动调整的对焦调整环,左右旋转该环可使成像在 CCD靶面上的图像最清晰;没
有光圈调整环,光圈不能调整,进入镜头的光通量不能通过改变镜头因素而改变,只能通过改变
视场的光照度来调整。结构简单,价格便宜。
手动光圈定焦镜头
手动光圈定焦镜头比固定光圈定焦镜头增加了光圈调整环,光圈范围一般从F1.2或F1.4到全关闭,
能方便地适应被被摄现场地光照度,光圈调整是通过手动人为进行的。光照度比较均匀,价格较
便宜
自动光圈定焦镜头
在手动光圈定焦镜头的光圈调整环上增加一个齿轮合传动的微型电机,并从驱动电路引出 3或4芯
屏蔽线,接到摄像机自动光圈接口座上。当进入镜头的光通量变化时,摄像机 CCD 靶面产生的电
荷发生相应的变化,从而使视频信号电平发生变化,产生一个控制信号,传给自动光圈镜头,从
而使镜头内的电机做相应的正向或反向转动,完成调整大小的任务。
手动光圈变焦镜头
焦距可变的,有一个焦距调整环,可以在一定范围内调整镜头的焦距,其可变比一般为2 ~3倍,
焦距一般为3.6~8mm。实际应用中,可通过手动调节镜头的变焦环,可以方便地选择被监视地市场
的市场角。但是当摄像机安装位置固定下以后,在频繁地手动调整变焦是很不方便的。因此,工
程完工后,手动变焦镜头的焦距一般很少调整。仅起定焦镜头的作用。
自动光圈电动变焦镜头
与自动光圈定焦镜头相比增加了两个微型电机,其中一个电机与镜头的变焦环合,当其转动时可以
控制镜头的焦距;另一电机与镜头的对焦环合,当其受控转动时可完成镜头的对焦。但是由于增
加了两个电机且镜片组数增多,镜头的体积也相应增大
电动三可变镜头
与自动光圈电动变焦镜头相比,只是将对光圈调整电机的控制由自动控制改为由控制器来手动控制
按视场大小分:小视场镜头,普通镜头(约50度左右),广角镜头和特广角镜头(100-120度)
标准镜头:
视角约50度,也是人单眼在头和眼不转动的情况下所能看到的视角,所以又称为标准镜头。
5mm相机的标准镜头的焦距多为40mm,50mm或55mm。120相机的标准镜头焦距多为80mm或75mm。CCD
芯片越大则标准镜头的焦距越长。
广角镜头:
视角90度以上,适用于拍摄距离近且范围大的景物,又能刻意夸大前景表现强烈远近感即透
视。35mm 相机的典型广角镜头是焦距28mm,视角为72度。120相机的50,40mm的镜头便相当于
35mm相机的35,28mm的镜头
长焦距镜头:
适于拍摄距离远的景物,景深小容易使背景模糊主体突出,但体积笨重且对动态主体对焦不
易。35mm 相机长焦距镜头通常分为三级,135mm以下称中焦距,135-500mm称长焦距,500mm 以
上称超长焦距。120 相机的150mm的镜头相当于35mm相机的105mm镜头。由於长焦距的镜头过于笨
重,所以有望远镜头的设计,即在镜头后面加一负透镜,把镜头的主平面前移,便可用较短的镜
体获得镜体获得长焦距的效果
反射式望远镜头:
是另一种超望远镜头的设计,利用反射镜面来构成影像,但因设计的关系无法装设光圈,仅
能以快门来调整曝光
微距镜头(marcolens):
除作极近距离的微距摄影外,也可远摄
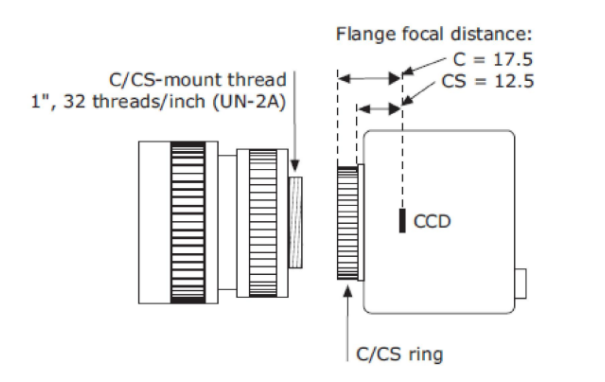
C型镜头
法兰焦距是安装法兰到入射镜头平行光的汇聚点之间的距离。法兰焦距为17.526mm或0.690in。安装罗纹为:直径1in,32牙.in。镜头可以用在长度为0.512in (13mm)以内的线阵传感器。但是,由于几何变形和市场角特性,必须鉴别短焦镜头是否合用。如焦距为12.6mm的镜头不应该用长度大于6.5mm的线阵。如果利用法兰焦距尺寸确定了镜头到列阵的距离,则对于物方放大倍数小于20倍时需增加镜头接圈。接圈加在镜头后面,以增加镜头到像的距离,以为多数镜头的聚焦范围位 5-10%。镜头接长距离为焦距/物方放大倍数
CS型镜头
加上5mm接圈(延长管),C型镜头可以用在CS型接口都相机
U型镜头
一种可变焦距的镜头,其法兰焦距为47.526mm或1.7913in,安装罗纹为M42×1。主要设计作35mm照片应用(如国产和进口的各种135相机镜头),可用于任何长度小于 1.25in(38.1mm)的列阵。建议不要用短焦距镜头
特殊镜头
如显微放大系统。 要特别注意 CS和 C的差别,不同类型的camera 和 不同类型的 Len连接时,要定制转接环。国外很贵,不如自己加工。光学镜头的主要参数和评价 主要参数有焦距,视场,物距,光圈,快门等。 对于镜头最完善的评价莫过于MTF(ModulationTransferFunction)。但是由于像差(标定的原因),镜头的每个范围都有一个MTF值。这些范围指的是:
(1)近轴部分,(2)离轴部分,(3)当光学系统存在不对称畸变时,上述两部分在不同方向上
的子部分。每个部分对于不同的辐射能量波长范围,都有各自相应的MTF值。MTF是评价成像系统的最常用、最优的指标,也是指导机器视觉系统集成的最优指标
注意:
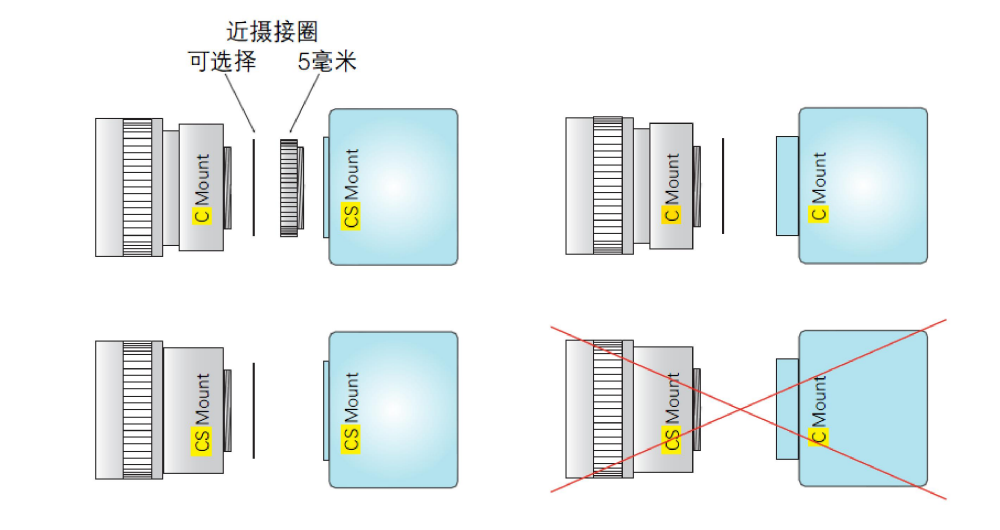
在数字图像处理领域,有一套含有两种接口规格(C mount和CS mount)的标准镜头
装配。由此产生了四种组合(见下图)。
其中之一不匹配:即CS mount镜头不能与Cmount相机一起使用。但是,如果您想为C S mo u n t相机安装Cmount镜头, 只需提前为相机旋上一个5毫米的近摄接圈
市面上常见的相机芯片尺寸
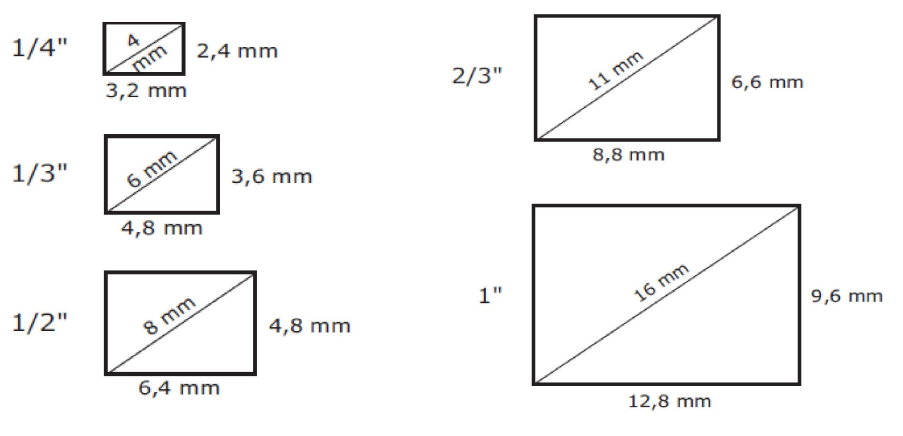
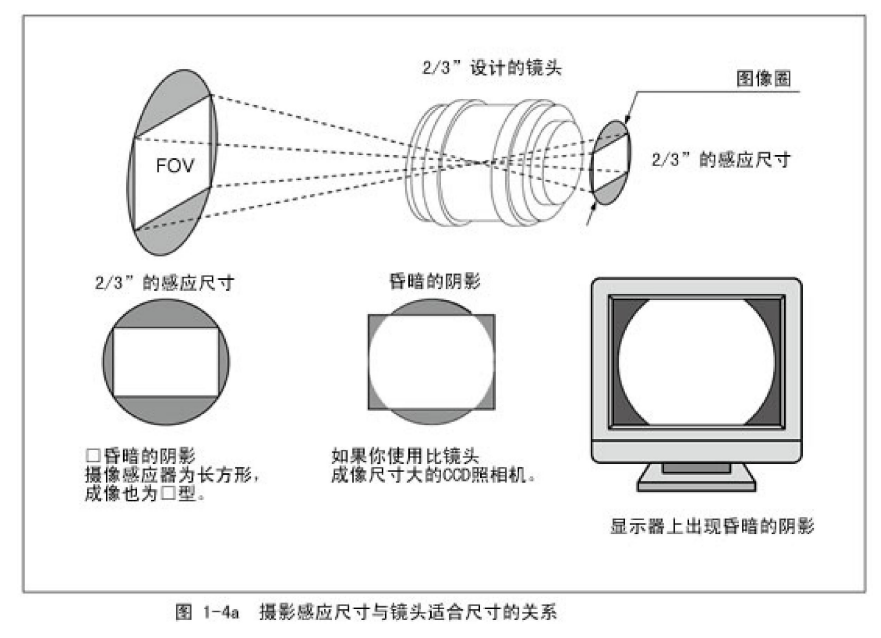
注意:镜头选择需要遵循大尺寸镜头兼容小尺寸相机,镜头的尺寸需要比相机的芯片尺寸要大,不然会出现隧道效应,图像边缘部分会出现黑视场。
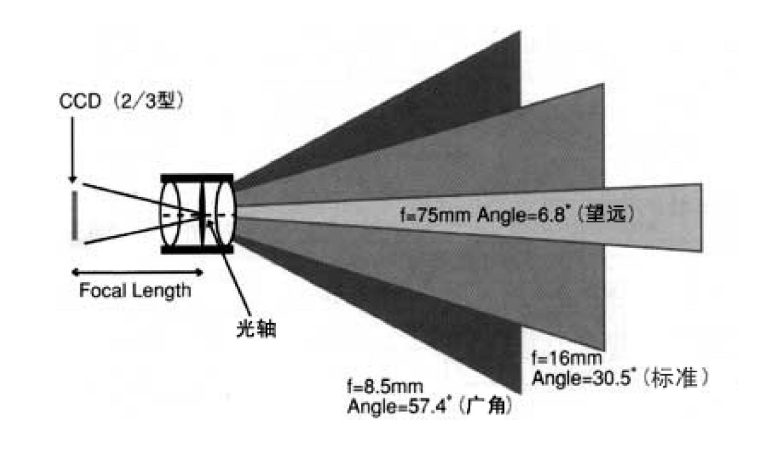
焦距,是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚集之焦点的距离。在照相机中是指从镜片中心到底片或CCD等成像平面的距离。具有短焦距的光学系统比长焦距的光学系统有更佳聚集光的能力。
焦距的大小决定着视场角的大小,焦距数值小,视场角大,所观察的范围也大,但距离远的物体分辨不很清楚;焦距数值大,视场角小,观察范围小,只要焦距选择合适,即便距离很远的物体也可以看得清清楚楚。由于焦距和视场角是一一对应的,一个确定的焦距就意味着一个确定的视场角,所以在选择镜头焦距时,应该充分考虑是观测细节重要,还是有一个大的观测范围重要,如果要看细节,就选择长焦距镜头;如果看近距离大场面,就选择小焦距的广角镜头
光圈是一个用来控制光线透过镜头,进入机身内感光面的光量的装置,它通常是在镜头内。表达光圈大小我们是用f值。对于已经制造好的镜头,我们不可能随意改变镜头的直径,但是我们可以通过在镜头内部加入多边形或者圆型,并且面积可变的孔状光栅来达到控制镜头通光量,这个装置就叫光圈
光圈系数:即光通量,用F表示,以镜头焦距f和通光孔径D的比值来衡量。每个镜头上都标有最大F值,例如6mm/F1.4代表最大孔径为4.29毫米。光通量与F值的平方成反比关系,F值越小,光通量越大。镜头上光圈指数序列的标值为1.4,2,2.8,4,5.6,8,11,16,22等,其规律是前一个标值时的曝光量正好是后一个标值对应曝光量的2倍。也就是说镜头的通光孔径分别是1/1.4,1/2,1/2.8,1/4,1/5.6,1/8,1/11,1/16,1/22,前一数值是后一数值的根号2倍,因此光圈指数越小,则通光孔径越大,成像靶面上的照度也就越大。另外镜头的光圈还有手动(MANUAL IRIS)和自动光圈(AUTO IRIS)之分。配合摄像头使用,手动光圈适合亮度变化不大的场合,它的进光量通过镜头上的光圈环调节,一次性调整合适为止。自动光圈镜头会随着光线的变化而自动调整,用于室外、入口等光线变化大且频繁的场合
相对孔径:光学镜头的重要参数之一,用镜头的有效孔径和焦距之比表示。相对孔径是个比值。相对孔径的大小表示镜头纳光的多少。相对孔径的倒数称光孔号码或光圈系数。最大的相对孔径刻在镜头上。1:2.8 比 1:4要好些
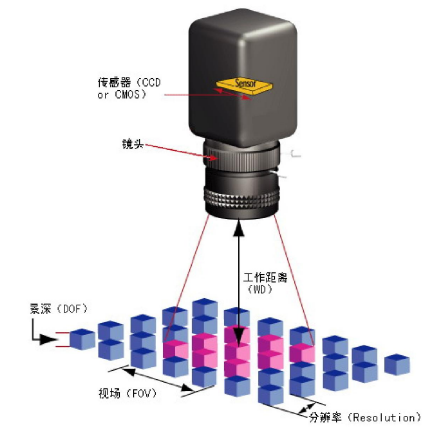
视场角定义:光学系统成像范围的量度
视场角是指以光学仪器的镜头为顶点,以被测目标的物象可通过镜头的最大范围的两条边缘构成的夹角。视场角的大小决定了光学仪器的视野范围,视场角越大,视野就越大,光学倍率就越小。通俗说,目标物体超过这个角就不会被收在镜头里
景深是指在摄影机镜头或其他成像器前沿着能够取得清晰图像的成像器轴线所测定的物体距离范围。通俗一些讲,在聚焦完成后,在焦点前后的范围内都能形成清晰的像,这一前一后的距离范围,便叫做景深
光学变焦英文名称为Optical Zoom,数码相机依靠光学镜头结构来实现变焦。数码相机的光学变焦方式与传统35mm相机差不多,就是通过镜片移动来放大与缩小需要拍摄的景物在CCD或CMOS上面成像的大小,光学变焦倍数越大,能拍摄的景物就越远
镜头的分辨率 描述镜头成像质量的内在指标是镜头的光学传递函数与畸变,但对用户而言,需要了解
的仅仅是镜头的空间分辨率,以每毫米能够分辨的黑白条纹线对为计量单位,计算公式为:镜头分辨
率N=视野总线数/2/画幅格式(L/W)。如500W像素镜头,2/3’传感器,则有2448/2/8.8=139线对/毫米。
另外还有计算公式:显微镜镜头分辨率(um)=0.61λ/NA, λ为波长,物体侧的数值孔径 NA =
sin u * n,成像侧的NA‘ = sin u‘* n’;照相镜头分辨率=1.22f λ/D;望远镜分辨率=1.22f/D(弧度)。
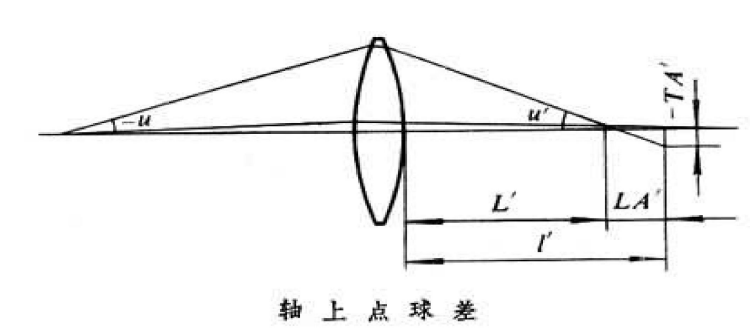
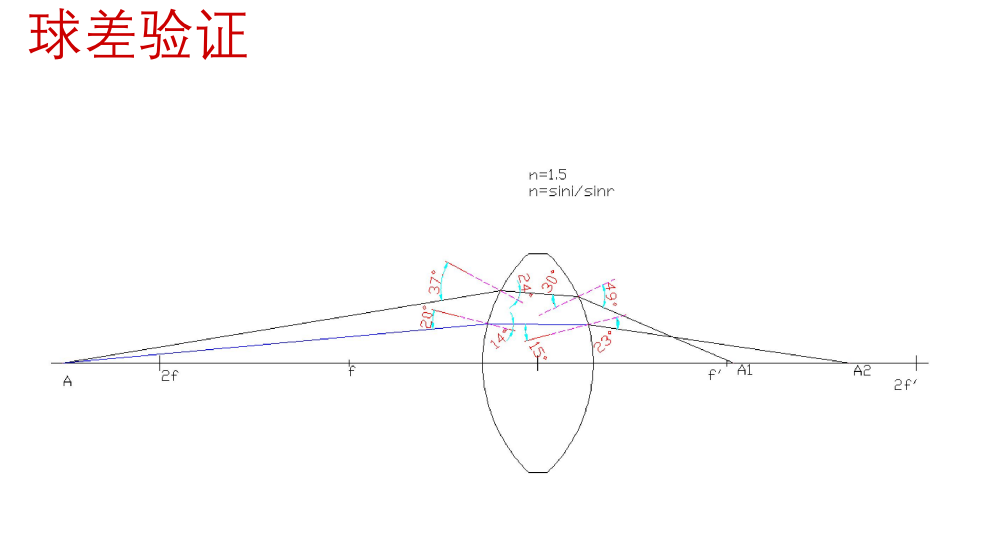
球差的产生是由于远离光轴的光线与近轴光线并不交于一点,这是因为球面镜头边缘的折射增大造成的。无论像平面在哪里,都会有一个弥散圆,只能使这个圆尽量小。
减小球差的一个办法就是使用较大的f系数,使用较小的通光光圈可以阻止远离光轴的光线通过镜头。但是由于衍射的存在,无法使孔径光阑无限小。另外一种方法就是在镜头中使用非球面代替球面,这样的镜头称为非球面镜头
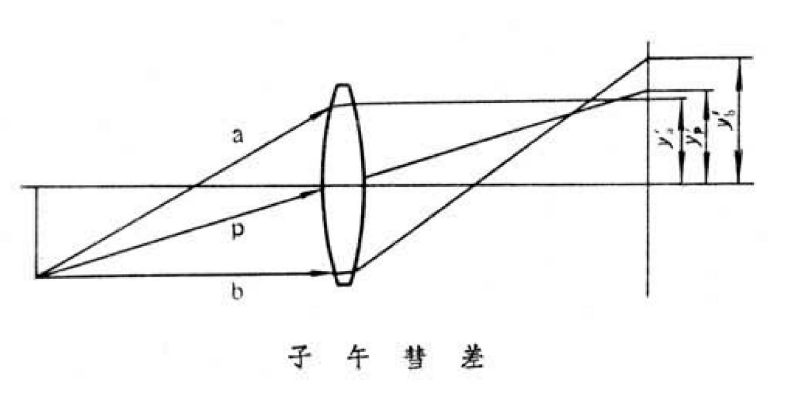
与光轴成一定角度的光线通过镜头后不聚于 与光轴成一定角度的光线通过镜头后不聚于一点。在这种情况下,像不是圆形的而是类 一点。在这种情况下,像不是圆形的而是类似彗星形状。
与球差不一样,彗差是非对称的。 与球差不一样,彗差是非对称的。
可通过较大的f系数来减少彗差。 系数来减少彗差
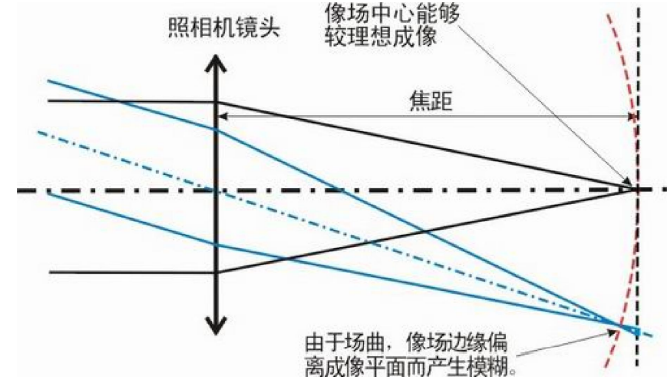
场曲又称“像场弯曲”。当透镜存在场曲时,整个光束的交点不与理想像点重合,虽然在每个特定点都能得到清晰的像点,但整个像平面则是一个曲面。这样在镜头里不能同时看清整个像面,给观察和照相造成困难。因此研究用显微镜的物镜一般都是平场物镜,这种物镜已经矫正了场曲。
在一个平坦的影象平面上, 影像的清晰度从中央向外发生变化,聚焦形成弧型, 就叫场曲. 原因是中心离镜头近,周边离镜头远,一般拍照团体人像,安排成弧型,就是纠正这一缺点
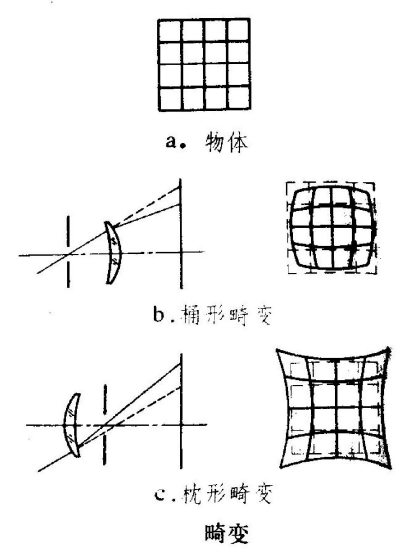
物体上的直线经过透镜成像后变成弯曲的现象。畸变是由于透镜的放大率随光束和主轴间所成角度改变而引起。光线离主轴越远,畸变越大,但是若与主轴正交并通过主轴,则不发生畸变。放大率随入射角度增加而增大时称正畸变;放大率随入射角度增加而减小时负畸变。换句话说,若物点离开光轴越远,放大率越大,就产生正畸变,如果物点离开光轴越远,放大率越小则产生负畸变。特别是镜片屈光度大时,像的畸变现象严重。由于畸变,看物体,像失去了原来的正确形状。减小畸变的方法是,对单一透镜改变镜片的外形,采用最佳的外形可以使畸变减小到最小程度。仅与物高三次方成正比的像差。若仅有畸变,得到的像是清晰的,只是像的形状与物不相似
下图为两种畸变方式:
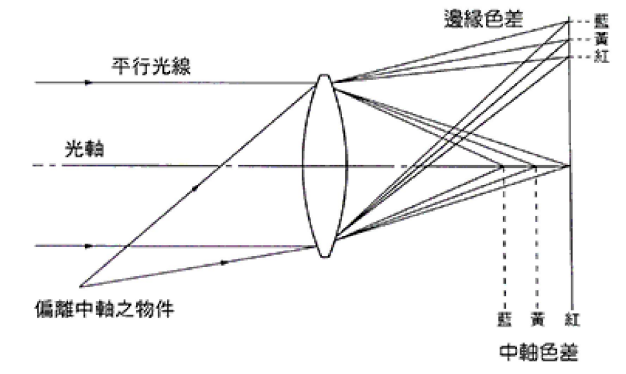
由于透射材料折射率随波长变化,造成物点发出的不同波长的光线通过光学系统后不会聚在一点,而成为有色的弥散斑。它仅出现于有透射元件的光学系统中。按照理想像平面上像差的线大小与物高的关系,可区分为:
①位置色差(又称纵向色差、中轴色差):与物高无关的像差,即不同波长的光线经由光学系统后会聚在不同的焦点。
②横向色差(又称倍率色差、边缘色差):与物高一次方成正比的像差。它使不同波长光线的像高不同,在理想像平面上物点的像成为一条小光谱。
这是两种最基本的色差,由于波长不同还会引起单色像差的不同,这称为色像差,如色球差、色彗差等。如果物平面处在无穷远,上述物高应换为物点的视角(即它和光轴的夹
角)
在进行镜头选型时,我们需要了解以下参数:
以下为镜头选型的步骤:
镜头接口只要可以跟相机接口匹配安装或可 镜头接口只要可以跟相机接口匹配安装或可通过外加转换口匹配安装就可以了;镜头可 通过外加转换口匹配安装就可以了;镜头可支持的最大CCD尺寸应大于等于选配相机 尺寸应大于等于选配相机CCD芯片尺寸
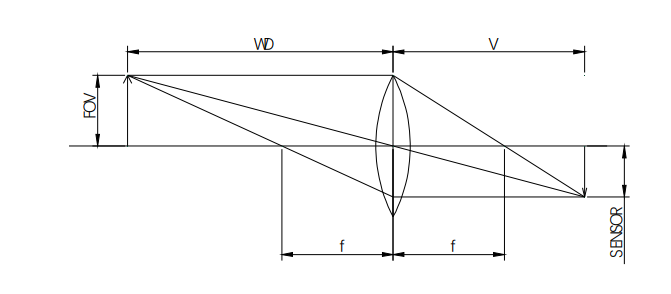
焦距的计算方法:
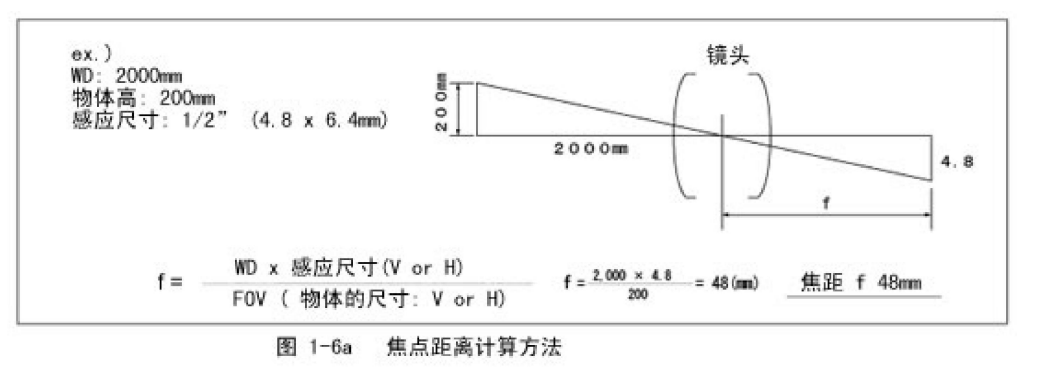
注意:计算镜头焦距时,有时候算出来的值实际上 计算镜头焦距时,有时候算出来的值实际上并没有这种焦距的镜头,那么我们要选择跟算出来的值接近的镜头;或者我们要加延长 算出来的值接近的镜头;
FOV的计算方法:
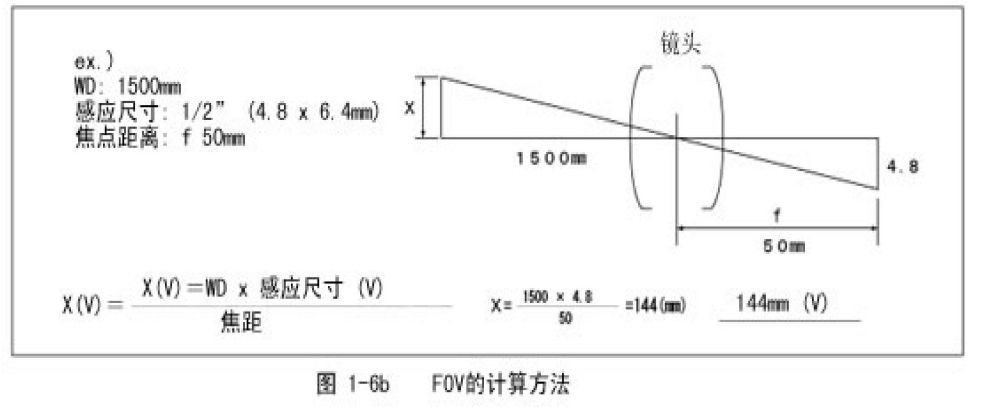
注意:如果WD固定,当焦距短时(广角镜头)则FOV变大。当焦距长时 变大。当焦距长时(望远镜头)则FOV变小
头的光圈大小决定图像的亮度,在拍摄高 镜头的光圈大小决定图像的亮度,在拍摄高速运动物体、曝光时间很短的应用中,应该 速运动物体、曝光时间很短的应用中,应该选用大光圈镜头,以提高图像亮度。 选用大光圈镜头,以提高图像亮度。
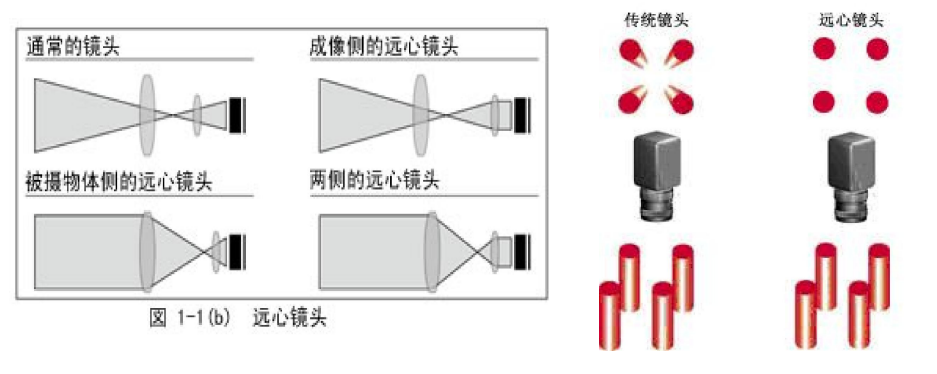
远心镜头是为纠正传统镜头的视差而特殊设计的镜头,主光线与镜头光源平行的镜头,分为物方远心和双侧远心两种,如左图;它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化
而变化。远心镜头与传统镜头对比,如下图
一个好的镜头,在分辨率、明锐度、景深等方面都有很好的体现,对各种像差的校正也比较好,但同时其价格也会几倍甚至上百倍的提高。如果人们掌握一些规律和经验,就可以使用同档次的镜头达到更好的效果。
o (1)焦距大小的影响情况
o 焦距越小,景深越大;
o 焦距越小,畸变越大;
o 焦距越小,渐晕现象越严重,使像差边缘的照度降低。
o (2)光圈大小的影响情况
o 光圈越大,图像亮度越高;
o 光圈越大,景深越小;
o 光圈越大,分辨率越高;
o 光圈越大,球差和慧差越严重;
o 光圈越大,渐晕现象越严重,光场照度越不均匀。
o (3)像场中央与边缘
o 一般像场中心较边缘分辨率高;
o 一般像场中心较边缘光场照度高。
o (4)光波长度的影响
o 在相同的摄像机及镜头参数条件下,照明光源的光波波长越短,得到的图像的分辨力
越高。所以在需要精密尺寸及位置测量的视觉系统中,尽量采用短波长的单色光作为
照明光源,对提高系统精度有很大的作用
1.延长管
延长管的作用:改变相机工作距离,视场大小

2.放大镜
放大镜作用:对视场进行相应倍率的放大。 放大镜作用:对视场进行相应倍率的放大。

光学倍率规格:
1.5X,2.0X,2.5X,3.0X,4.0X,5.0X 1.5X,2.0X,2.5X,3.0X,4.0X,5.0
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我正在为在AmazonEC2实例上运行的应用程序设计一个AutoScaling系统。应用程序从SQS读取消息并对其进行处理。AutoScaling系统将监控两件事:SQS中的消息数量,所有EC2机器上运行的进程总数。例如,如果SQS中的消息数量超过3000,我希望系统自动缩放,创建一个新的EC2实例,在其上部署代码,当消息数量低于2000时,我希望系统终止EC2实例.我正在用Ruby和Capistrano做这件事。我的问题是:我无法找到一种方法来确定在所有EC2机器上运行的进程数并将该数字保存在变量中。你能帮帮我吗? 最佳答案 您可
我正在构建一个点击元素的Selenium/Ruby网络机器人。问题是,有时在机器人决定找不到元素之前没有足够的时间加载页面。让Selenium在执行操作之前等待的Ruby方法是什么?我更喜欢显式等待,但我也接受隐式等待。我尝试使用wait.until方法:require"selenium-webdriver"require"nokogiri"driver=Selenium::WebDriver.for:chromewait=Selenium::WebDriver::Wait.new(:timeout=>15)driver.navigate.to"http://google.com"dr
我正在使用Rails5(Ruby2.4)。我想阅读.xls文档,我想将数据转换为CSV格式,就像它出现在Excel文件中一样。有人推荐我使用Roo,所以我有book=Roo::Spreadsheet.open(file_location)sheet=book.sheet(0)text=sheet.to_csvarr_of_arrs=CSV.parse(text)但是,返回的内容与我在电子表格中看到的内容不同。例如,电子表格中的一个单元格有16:45.81当我从上面获取CSV数据时,返回的是"0.011641319444444444"如何解析Excel文档并准确获取我所看到的内容?我不在
我正在使用Ruby、SeleniumWebDriver和Nokogiri从网页中检索数据。加载正确的HTML后,我打印某个类的内容。例如,require"selenium-webdriver"require"nokogiri"browser=Selenium::WebDriver.for:chromebrowser.get"https://jsfiddle.net"doc=Nokogiri::HTML.parse(browser.page_source)doc.css('.aiButton').map(&:text).join(',')到目前为止,我发现最困难的部分是正确加载正确的HT
我想创建一个供不同用户用于其Facebook页面的MessengerBot。我创建了一个Rails应用程序并使用facebook-messengergem.我成功创建了机器人,当我为一个页面设置时它可以工作。现在,我按照说明让我的机器人在多个Facebook页面上运行(请参阅"Makeaconfigurationprovider"section)。我是Rails的新手,我不确定将类ExampleProvider放在哪里?我把它放在我的config/application.rb文件中:require_relative'boot'require'rails/all'#Requiretheg