 来自: 参考文档《RKISP_Driver_User_Manual_v1.3.pdf》
来自: 参考文档《RKISP_Driver_User_Manual_v1.3.pdf》rk3568_r:/ # ls sys/class/video4linux
ls sys/class/video4linux
v4l-subdev0 v4l-subdev2 video1 video3 video5 video7
v4l-subdev1 video0 video2 video4 video6 video8
rk3568_r:/ # cat sys/class/video4linux/video0/dev
cat sys/class/video4linux/video0/dev
81:0
rk3568_r:/ # cat sys/class/video4linux/video0/name
cat sys/class/video4linux/video0/name
rkisp_mainpathrk3568_r:/ # ls /dev/video* -l
ls /dev/video* -l
crw-rw---- 1 media camera 81, 0 2022-11-09 17:06 /dev/video0
crw-rw---- 1 media camera 81, 1 2022-11-09 17:06 /dev/video1
crw-rw---- 1 media camera 81, 2 2022-11-09 17:06 /dev/video2
crw-rw---- 1 media camera 81, 3 2022-11-09 17:06 /dev/video3
crw-rw---- 1 media camera 81, 4 2022-11-09 17:06 /dev/video4
crw-rw---- 1 media camera 81, 5 2022-11-09 17:06 /dev/video5
crw-rw---- 1 media camera 81, 6 2022-11-09 17:06 /dev/video6
crw-rw---- 1 media camera 81, 7 2022-11-09 17:06 /dev/video7
crw-rw---- 1 media camera 81, 8 2022-11-09 17:06 /dev/video8
rk3568_r:/ # ls /dev/v4l-sub* -l
ls /dev/v4l-sub* -l
crw-rw-rw- 1 media camera 81, 9 2022-11-09 17:06 /dev/v4l-subdev0
crw-rw-rw- 1 media camera 81, 10 2022-11-09 17:06 /dev/v4l-subdev1
crw-rw-rw- 1 media camera 81, 11 2022-11-09 17:06 /dev/v4l-subdev2rk3568_r:/ # media-ctl -d /dev/media0 -p
media-ctl -d /dev/media0 -p
Opening media device /dev/media0
Enumerating entities
Found 13 entities
Enumerating pads and links
Media controller API version 0.0.255
Media device information
------------------------
driver rkisp-vir0
model rkisp0
serial
bus info
hw revision 0x0
driver version 0.0.255
Device topology
- entity 1: rkisp-isp-subdev (4 pads, 7 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev0
pad0: Sink
[fmt:SBGGR10/4224x3136
crop.bounds:(0,0)/4096x3072
crop:(0,0)/4096x3072]
<- "rkisp-csi-subdev":1 []
<- "rkisp_rawrd0_m":0 []
<- "rkisp_rawrd2_s":0 []
pad1: Sink
<- "rkisp-input-params":0 []
pad2: Source
[fmt:YUYV2X8/4096x3072
crop.bounds:(0,0)/4096x3072
crop:(0,0)/4096x3072]
-> "rkisp_mainpath":0 []
-> "rkisp_selfpath":0 []
pad3: Source
-> "rkisp-statistics":0 []
- entity 6: rkisp-csi-subdev (6 pads, 5 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev1
pad0: Sink
<- "rockchip-csi2-dphy0":1 []
pad1: Source
-> "rkisp-isp-subdev":0 []
pad2: Source
-> "rkisp_rawwr0":0 []
pad3: Source
pad4: Source
-> "rkisp_rawwr2":0 []
pad5: Source
-> "rkisp_rawwr3":0 []
- entity 13: rkisp_mainpath (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video0
pad0: Sink
<- "rkisp-isp-subdev":2 []
- entity 19: rkisp_selfpath (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video1
pad0: Sink
<- "rkisp-isp-subdev":2 []
- entity 25: rkisp_rawwr0 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video2
pad0: Sink
<- "rkisp-csi-subdev":2 []
- entity 31: rkisp_rawwr2 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video3
pad0: Sink
<- "rkisp-csi-subdev":4 []
- entity 37: rkisp_rawwr3 (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video4
pad0: Sink
<- "rkisp-csi-subdev":5 []
- entity 43: rkisp_rawrd0_m (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video5
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 49: rkisp_rawrd2_s (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video6
pad0: Source
-> "rkisp-isp-subdev":0 []
- entity 55: rkisp-statistics (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video7
pad0: Sink
<- "rkisp-isp-subdev":3 []
- entity 61: rkisp-input-params (1 pad, 1 link)
type Node subtype V4L
device node name /dev/video8
pad0: Source
-> "rkisp-isp-subdev":1 []
- entity 67: rockchip-csi2-dphy0 (2 pads, 2 links)
type V4L2 subdev subtype Unknown
device node name /dev/v4l-subdev2
pad0: Sink
<- "m00_b_ov13850 4-0010":0 []
pad1: Source
-> "rkisp-csi-subdev":0 []
- entity 70: m00_b_ov13850 4-0010 (1 pad, 1 link)
type V4L2 subdev subtype Sensor
device node name /dev/v4l-subdev3
pad0: Source
[fmt:SBGGR10/4224x3136]
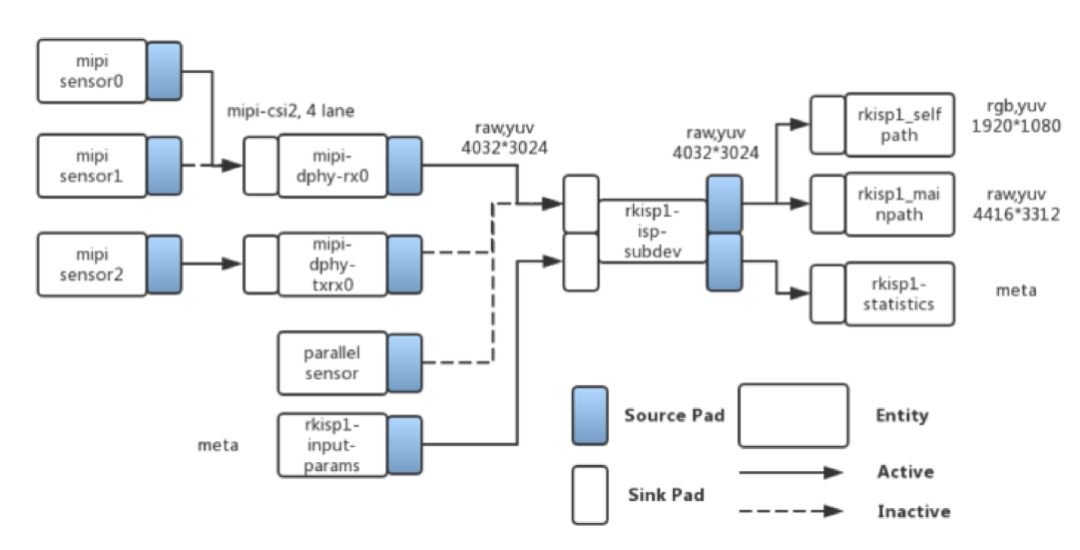
-> "rockchip-csi2-dphy0":0 []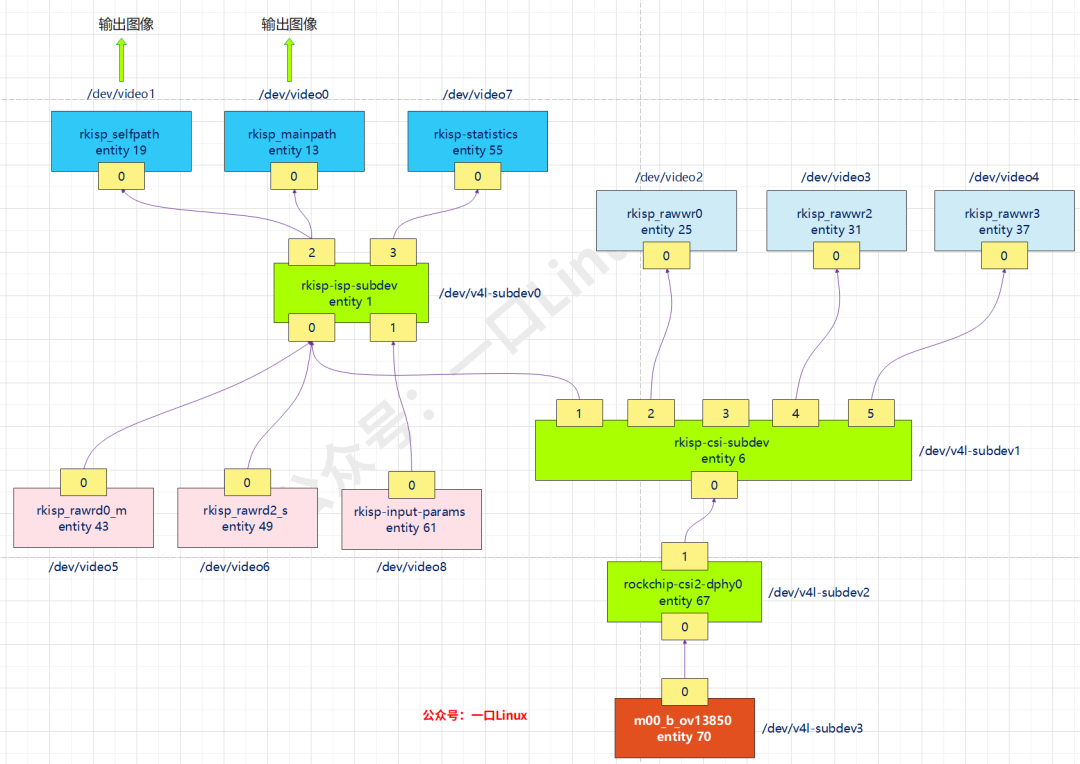 拓扑结构该图中各个entity对应的设备节点名称已经标注。模块的上方的黄色pad默认是source pad,下方的黄色pad是sink pad字符设备类型主要有两种(只考虑摄像头):
拓扑结构该图中各个entity对应的设备节点名称已经标注。模块的上方的黄色pad默认是source pad,下方的黄色pad是sink pad字符设备类型主要有两种(只考虑摄像头):
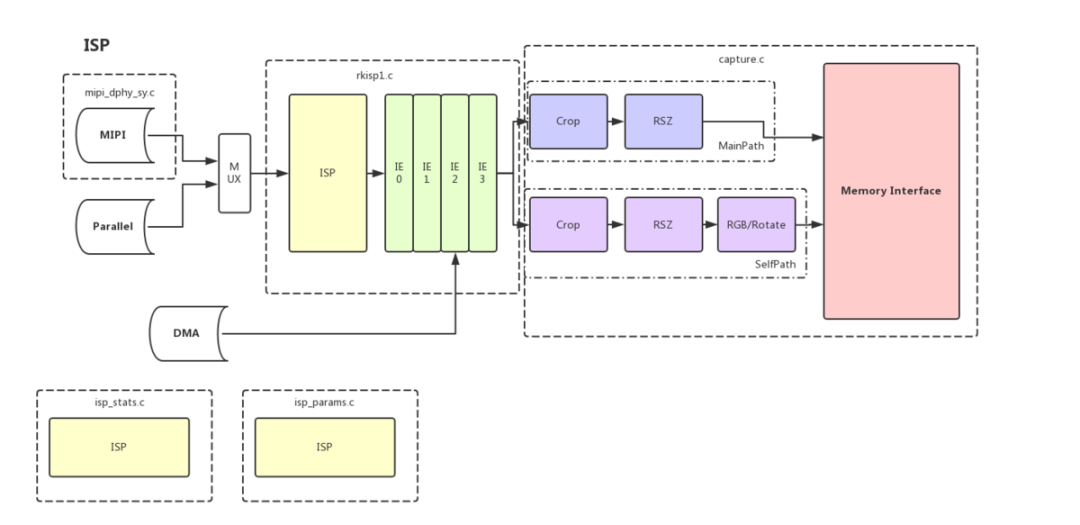
 这些entity我们可以理解为一个个功能模块。这些功能模块有的用于驱动csi、有的驱动isp、有的用于预览图像、有的用于统计视频信息、有的用于配置参数。这些功能模块,并不是都一定每个camera控制器都有的,有一些是通用的,比如,mainpath、selfpath,有一些要完全看SoC设计,即使瑞芯微的SoC,不同型号,差别也不小。所以具体问题要具体分析,不可教条。v4l2只定义了基本架构,定义好了回调函数接口,要实现模块具体功能只需要填充好对应的回调函数即可,应用层通过这些字符设备文件和对应的ioctrl命令,就可以实现相应的功能。
这些entity我们可以理解为一个个功能模块。这些功能模块有的用于驱动csi、有的驱动isp、有的用于预览图像、有的用于统计视频信息、有的用于配置参数。这些功能模块,并不是都一定每个camera控制器都有的,有一些是通用的,比如,mainpath、selfpath,有一些要完全看SoC设计,即使瑞芯微的SoC,不同型号,差别也不小。所以具体问题要具体分析,不可教条。v4l2只定义了基本架构,定义好了回调函数接口,要实现模块具体功能只需要填充好对应的回调函数即可,应用层通过这些字符设备文件和对应的ioctrl命令,就可以实现相应的功能。/*
* struct rkisp_device - ISP platform device
* @base_addr: base register address
* @active_sensor: sensor in-use, set when streaming on
* @isp_sdev: ISP sub-device
* @cap_dev: image capture device
* @stats_vdev: ISP statistics output device
* @params_vdev: ISP input parameters device
* @dmarx_dev: image input device
* @csi_dev: mipi csi device
* @br_dev: bridge of isp and ispp device
*/
struct rkisp_device {
struct list_head list;
void __iomem *base_addr;
struct device *dev;
char name[128];
void *sw_base_addr;
struct rkisp_hw_dev *hw_dev;
struct v4l2_device v4l2_dev;
struct v4l2_ctrl_handler ctrl_handler;
struct media_device media_dev;
struct v4l2_async_notifier notifier;
struct v4l2_subdev *subdevs[RKISP_SD_MAX];
struct rkisp_sensor_info *active_sensor;
struct rkisp_sensor_info sensors[RKISP_MAX_SENSOR];
int num_sensors;
struct rkisp_isp_subdev isp_sdev;
struct rkisp_capture_device cap_dev;
struct rkisp_isp_stats_vdev stats_vdev;
struct rkisp_isp_params_vdev params_vdev;
struct rkisp_dmarx_device dmarx_dev;
struct rkisp_csi_device csi_dev;
struct rkisp_bridge_device br_dev;
struct rkisp_luma_vdev luma_vdev;
struct proc_dir_entry *procfs;
struct rkisp_pipeline pipe;
enum rkisp_isp_ver isp_ver;
struct rkisp_emd_data emd_data_fifo[RKISP_EMDDATA_FIFO_MAX];
unsigned int emd_data_idx;
unsigned int emd_vc;
unsigned int emd_dt;
int vs_irq;
struct gpio_desc *vs_irq_gpio;
struct rkisp_hdr hdr;
unsigned int isp_state;
unsigned int isp_err_cnt;
unsigned int isp_isr_cnt;
unsigned int isp_inp;
struct mutex apilock; /* mutex to serialize the calls of stream */
struct mutex iqlock; /* mutex to serialize the calls of iq */
wait_queue_head_t sync_onoff;
dma_addr_t resmem_addr;
phys_addr_t resmem_pa;
size_t resmem_size;
int dev_id;
unsigned int skip_frame;
unsigned int irq_ends;
unsigned int irq_ends_mask;
bool send_fbcgain;
struct rkisp_ispp_buf *cur_fbcgain;
struct rkisp_buffer *cur_spbuf;
bool is_thunderboot;
struct kfifo rdbk_kfifo;
spinlock_t rdbk_lock;
int rdbk_cnt;
int rdbk_cnt_x1;
int rdbk_cnt_x2;
int rdbk_cnt_x3;
u32 rd_mode;
u8 filt_state[RDBK_F_MAX];
};| 成员 | 含义 | 拓扑图中的entity | 设备名 |
| void __iomem *base_addr | 基地址 | - | - |
| struct rkisp_sensor_info *active_sensor; | 正在使用的sensor | - | - |
| struct rkisp_isp_subdev isp_sdev; | isp模块 | rkisp-isp-subdev | v4l-subdev0 |
| struct rkisp_capture_device cap_dev; | capture模块, 维护struct vb2_v4l2_buffer | 对应拓扑图中的rkisp_mainpath、rkisp_selfpath、rkisp_rawwr0、rkisp_rawwr2、rkisp_rawwr3 | video0~video4 |
| struct rkisp_isp_stats_vdev stats_vdev; | 数据统计模块 | rkisp-statistics | video7 |
| struct rkisp_isp_params_vdev params_vdev; | 参数配置模块 | rkisp-input-params | video8 |
| struct rkisp_dmarx_device dmarx_dev; | dma数据接收模块 | rkisp_rawrd0_m、rkisp_rawrd2_s | video5、video6 |
| struct rkisp_csi_device csi_dev; | csi的sub device从设备 | rkisp-csi-subdev | v4l-subdev1 |
| struct rkisp_bridge_device br_dev; | 桥接模块备,isp2.0中有 | - | - |
| enum rkisp_isp_ver isp_ver; | isp版本号,rk3568是2.1 | - | - |
struct rkisp_csi_device {
struct rkisp_device *ispdev;
struct v4l2_subdev sd;
struct media_pad pads[CSI_PAD_MAX];
struct sink_info sink[CSI_PAD_MAX - 1];
int max_pad;
u32 err_cnt;
u32 irq_cnt;
u8 mipi_di[CSI_PAD_MAX - 1];
u8 tx_first[HDR_DMA_MAX];
};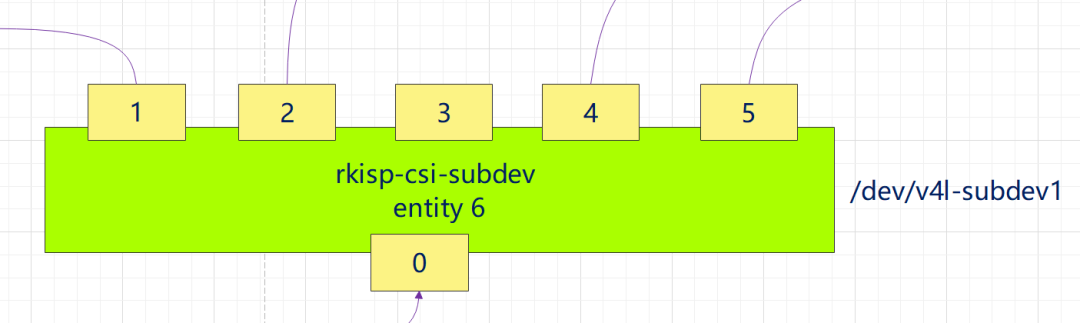 由上图可知,该模块有6个pad,pad属性定义如下
由上图可知,该模块有6个pad,pad属性定义如下#define MEDIA_PAD_FL_SINK (1 << 0)
#define MEDIA_PAD_FL_SOURCE (1 << 1)
#define MEDIA_PAD_FL_MUST_CONNECT (1 << 2)enum rkisp_csi_pad {
CSI_SINK = 0,
CSI_SRC_CH0,
CSI_SRC_CH1,
CSI_SRC_CH2,
CSI_SRC_CH3,
CSI_SRC_CH4,
CSI_PAD_MAX
};//isp的in pad
enum rkisp_isp_inp {
INP_INVAL = 0,
INP_RAWRD0 = BIT(0),
INP_RAWRD1 = BIT(1),
INP_RAWRD2 = BIT(2),
INP_CSI = BIT(4),
INP_DVP = BIT(5),
INP_DMARX_ISP = BIT(6),
INP_LVDS = BIT(7),
INP_CIF = BIT(8),
};rkisp_register_csi_subdev()
{
……
v4l2_subdev_init(sd, &rkisp_csi_ops);
sd->flags |= V4L2_SUBDEV_FL_HAS_DEVNODE; //是否需要子节点
sd->entity.ops = &rkisp_csi_media_ops;
sd->entity.function = MEDIA_ENT_F_V4L2_SUBDEV_UNKNOWN;
snprintf(sd->name, sizeof(sd->name), CSI_DEV_NAME);//名字前缀,#define CSI_DEV_NAME DRIVER_NAME "-csi-subdev"
csi_dev->pads[CSI_SINK].flags =
MEDIA_PAD_FL_SINK | MEDIA_PAD_FL_MUST_CONNECT; //pad0属性
csi_dev->pads[CSI_SRC_CH0].flags =
MEDIA_PAD_FL_SOURCE | MEDIA_PAD_FL_MUST_CONNECT; //pad1属性
csi_dev->max_pad = CSI_SRC_CH0 + 1;
if (dev->isp_ver == ISP_V20 || dev->isp_ver == ISP_V21) {
csi_dev->max_pad = CSI_PAD_MAX;
csi_dev->pads[CSI_SRC_CH1].flags = MEDIA_PAD_FL_SOURCE;//pad2属性
csi_dev->pads[CSI_SRC_CH2].flags = MEDIA_PAD_FL_SOURCE;//pad3属性
csi_dev->pads[CSI_SRC_CH3].flags = MEDIA_PAD_FL_SOURCE;//pad4属性
csi_dev->pads[CSI_SRC_CH4].flags = MEDIA_PAD_FL_SOURCE;//pad5属性
}
ret = media_entity_pads_init(&sd->entity, csi_dev->max_pad,
csi_dev->pads);
……
}//各个模块对应的名字
【kernel\drivers\media\platform\rockchip\isp\dev.h】
#define DRIVER_NAME "rkisp"
#define ISP_VDEV_NAME DRIVER_NAME "_ispdev"
#define SP_VDEV_NAME DRIVER_NAME "_selfpath"
#define MP_VDEV_NAME DRIVER_NAME "_mainpath"
#define DMA_VDEV_NAME DRIVER_NAME "_dmapath"
#define RAW_VDEV_NAME DRIVER_NAME "_rawpath"
#define DMATX0_VDEV_NAME DRIVER_NAME "_rawwr0"
#define DMATX1_VDEV_NAME DRIVER_NAME "_rawwr1"
#define DMATX2_VDEV_NAME DRIVER_NAME "_rawwr2"
#define DMATX3_VDEV_NAME DRIVER_NAME "_rawwr3"
#define DMARX0_VDEV_NAME DRIVER_NAME "_rawrd0_m"
#define DMARX1_VDEV_NAME DRIVER_NAME "_rawrd1_l"
#define DMARX2_VDEV_NAME DRIVER_NAME "_rawrd2_s"
#define GRP_ID_SENSOR BIT(0)
#define GRP_ID_MIPIPHY BIT(1)
#define GRP_ID_ISP BIT(2)
#define GRP_ID_ISP_MP BIT(3)
#define GRP_ID_ISP_SP BIT(4)
#define GRP_ID_ISP_DMARX BIT(5)
#define GRP_ID_ISP_BRIDGE BIT(6)
#define GRP_ID_CSI BIT(7)
//pad的属性
[kernel\include\uapi\linux\media.h]
#define MEDIA_PAD_FL_SINK (1 << 0)
#define MEDIA_PAD_FL_SOURCE (1 << 1)
#define MEDIA_PAD_FL_MUST_CONNECT (1 << 2)rkisp_register_platform_subdevs()
isp_subdev_notifier()
v4l2_async_notifier_parse_fwnode_endpoints()
__v4l2_async_notifier_parse_fwnode_endpoints()
{
for ( fwnode = fwnode_graph_get_next_endpoint())
{
dev_fwnode = fwnode_graph_get_port_parent(fwnode);
is_available = fwnode_device_is_available(dev_fwnode);
fwnode_handle_put(dev_fwnode);
fwnode_graph_parse_endpoint(fwnode, &ep);
}
for ( fwnode = fwnode_graph_get_next_endpoint())
{
dev_fwnode = fwnode_graph_get_port_parent(fwnode);
is_available = fwnode_device_is_available(dev_fwnode);
fwnode_handle_put(dev_fwnode);
fwnode_graph_parse_endpoint(fwnode, &ep);
v4l2_async_notifier_fwnode_parse_endpoint();
}
fwnode_handle_put(fwnode);
}[kernel\Documentation\devicetree\bindings\media\]
video-interfaces.txt 关于sensor节点属性的说明,接口类型,
rockchip-isp1.txt isp模块属性说明
rockchip-mipi-dphy.txt dphy模块的说明
kernel\Documentation\devicetree\bindings\media\i2c\ovxxxxxx.txt ov系列的摄像设备树说明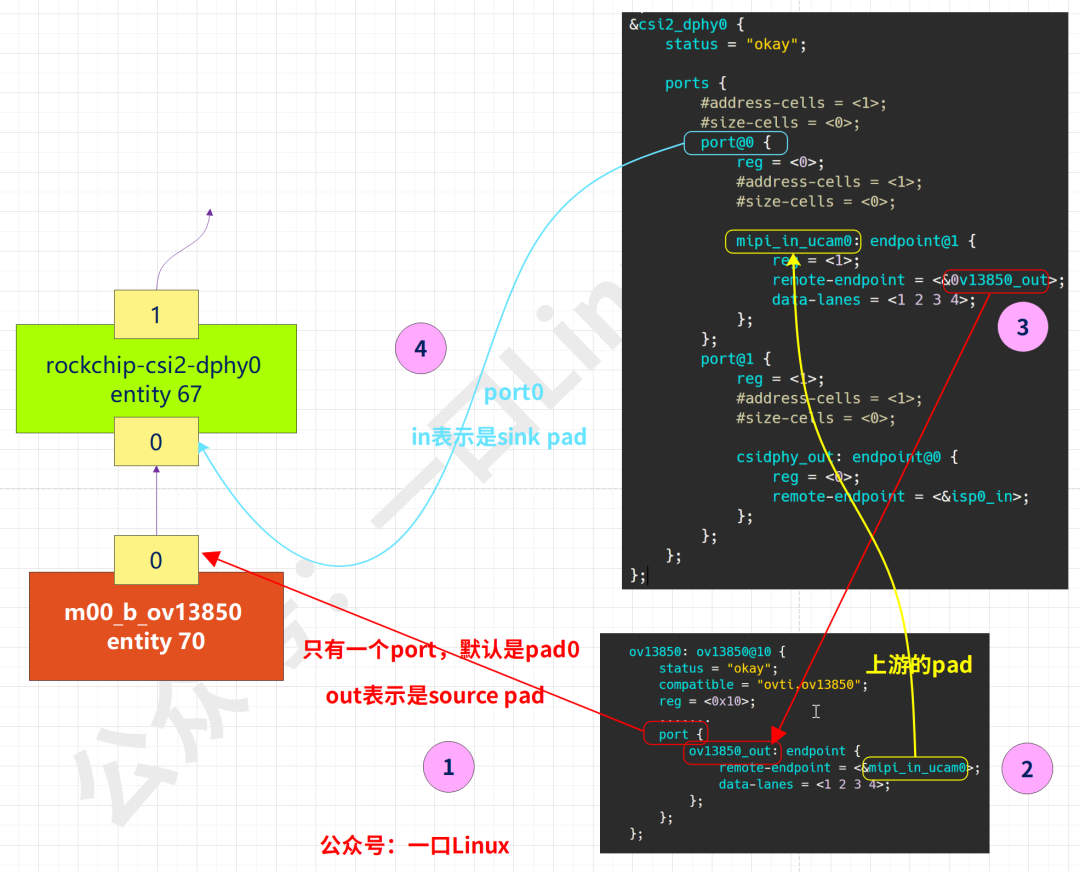 由上图可得:
由上图可得:
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
我正在寻找用于Rails的优质管理插件。似乎大多数现有的插件/gem(例如“restful_authentication”、“acts_as_authenticated”)都围绕着self注册等展开。但是,我正在寻找一种功能齐全的基于管理/管理角色的解决方案——但不是简单地附加到另一个非基于角色的解决方案。如果我找不到,我想我会自己动手......只是不想重新发明轮子。 最佳答案 RyanBates最近做了两个关于授权的railscast(注意身份验证和授权之间的区别;身份验证检查用户是否如她所说的那样,授权检查用户是否有权访问资源
我正在根据Rakefile中的现有测试文件动态生成测试任务。假设您有各种以模式命名的单元测试文件test_.rb.所以我正在做的是创建一个以“测试”命名空间内的文件名命名的任务。使用下面的代码,我可以用raketest:调用所有测试require'rake/testtask'task:default=>'test:all'namespace:testdodesc"Runalltests"Rake::TestTask.new(:all)do|t|t.test_files=FileList['test_*.rb']endFileList['test_*.rb'].eachdo|task|n
我想要像“嘿那里”这样的东西变成,例如,#316583。我希望将任意长度的字符串“归结”为十六进制颜色。我不知道从哪里开始。我在想,每个字符串的MD5散列都是不同的-但如何将该散列转换为十六进制颜色数字? 最佳答案 你可以只取几位前几位:require'digest/md5'color=Digest::MD5.hexdigest('Mytext')[0..5] 关于ruby-如何使用Ruby基于字母数字字符串生成颜色?,我们在StackOverflow上找到一个类似的问题:
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3
我正在尝试整个BDD方法并想测试AMQP基于Vanilla的方面Ruby我正在写的应用程序。选择Minitest后作为与其他名副其实的蔬菜框架不同的平衡功能和表现力的测试框架,我着手编写此规范:#File./test/specs/services/my_service_spec.rb#Requirementsfortestrunningandconfigurationrequire"minitest/autorun"require"./test/specs/spec_helper"#Externalrequires#MinitestSpecsforEventMachinerequire
我分1,000个批处理从服务器获取大约20,000个数据集。每个数据集都是一个JSON对象。坚持这会产生大约350MB的未压缩明文。我的内存限制为1GB。因此,我以追加模式将每1,000个JSON对象作为一个数组写入到一个原始JSON文件中。结果是一个包含20个需要聚合的JSON数组的文件。无论如何我都需要触摸它们,因为我想添加元数据。一般RubyYajlParser使这成为可能:raw_file=File.new(path_to_raw_file,'r')json_file=File.new(path_to_json_file,'w')datasets=[]parser=Yajl::
有什么方法可以查看gem是否仅在UNIX/类UNIX系统上受支持?是否有任何gem可以“筛选”所有gem并查看在Windows上使用它是否有任何问题。 最佳答案 简短回答:否。老实说,Windows在Ruby世界里是二等公民。这主要是因为Linux、BSD、OSX和几乎所有其他基于POSIX的系统都同意一件事,而Windows将去做完全不同的事情。即使是用于Windows的gem也可能偶尔会由于开发人员的疏忽而损坏。大多数gem作者没有针对Windows运行并依赖于用户错误报告的持续集成服务器。支持Windows很困难,不仅因为AP