首先讲下地理加权空间权重矩阵:
该矩阵的经济含义是通过不同点的坐标系之间的距离远近来衡量两地之间的关系重要程度,当两点之间距离较远,所占的权重越低,而距离越近,权重越高。故操作如下:
首先需要导入坐标数据:

A=csvread('JWD.csv',1,0); % JWD.csv是文件名,csvread是读取csv格式的文件。
读取之后 会得到:

接下来读取经纬度的信息:
x=A(:,3);y=A(:,2);
可以看到所需自己的数据已经导入 ,输入已经写好的脚本:
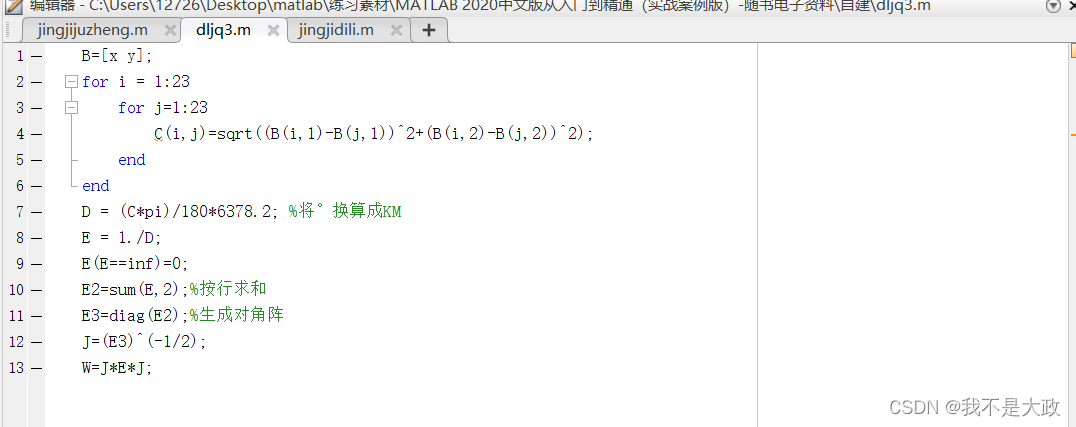
输入:

空间权重矩阵就做好了:

我们打开看看:
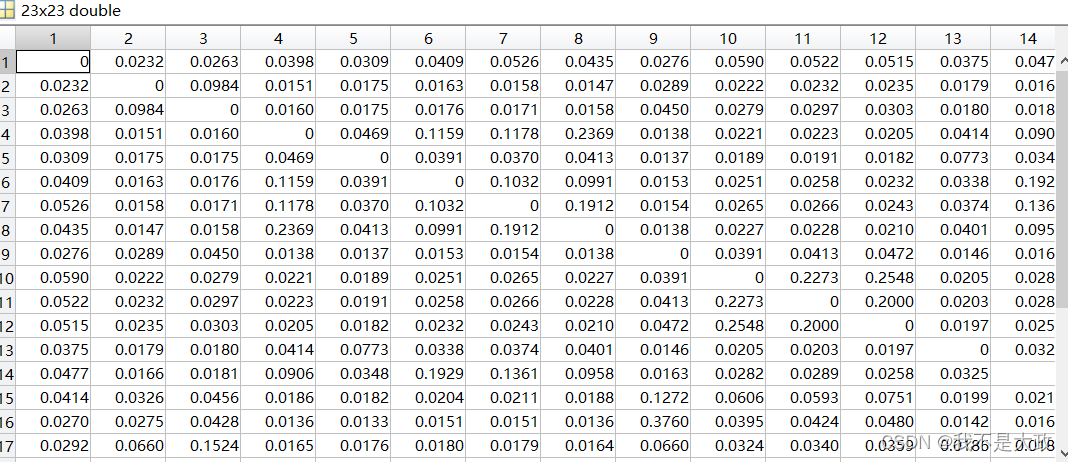
该方法相较一般意义上的行标准化有个好处,传统的行标准化会使矩阵成为非对称阵,这在这种反距离矩阵上是具有极强的破坏性的,我们考虑使用反距离矩阵(地理加权权重矩阵)时,是假定两地的关系强弱是由距离决定的,但是非对称矩阵就会形成逻辑上的不自洽,例如北京对上海的权重是0.213,但上海对北京的却是0.354,从上海到北京的距离应该和北京到上海的距离一样,这就使得矩阵失去了原有的经济学含义。
接下来说下经济矩阵:该矩阵是以两地经济水平作为衡量标准,当地区1与地区2的经济水平越相近,则认为两地的权重越大,为此,我们需要各个区域的人均GDP数据(当然如果你有更好的更合适的指标也可以替换,逻辑是差不多的)。做法同上,这里就不多赘述了,直接上代码吧:
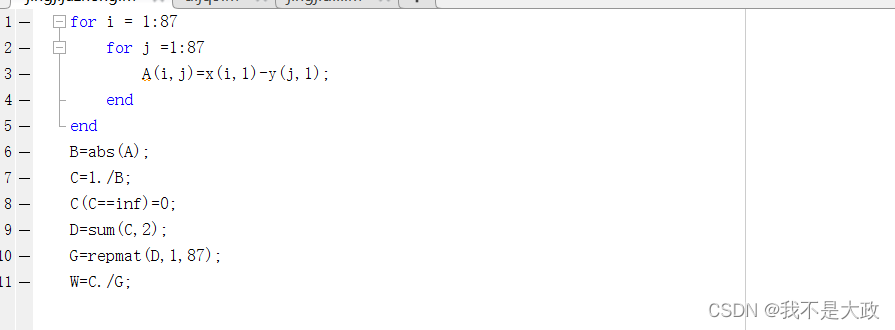
经济矩阵并非非常需要为对称阵,但也依然可以做成对称,该代码做出来的并非对称,可以替换掉地理加权矩阵的后半部分代码即可实现对称。
经济地理权重矩阵的制作需要以前面两个矩阵的制作为前提,他同时考虑了两种情况,但是实证分析中往往表现并不太好,故谨慎使用;
代码如下:
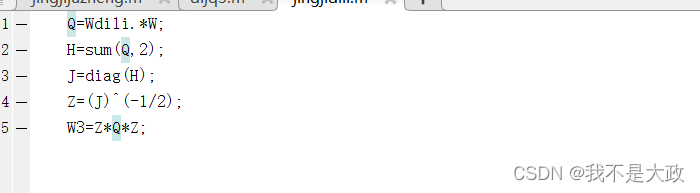
Wdili是地理加权矩阵,W是经济距离矩阵,二者相乘即使结果,再进行一次标准化即可。
该代码的具体教程,我在blibli上传了制作的视频讲解,如果因我在CSDN中讲解的不到位导致各位看官没有理解的可以去blibli搜索科研虾观看详细讲解。同时如果各位想更多的交流与探讨的,可以加扣扣群:936269384,同时我也将代码上传至群文件。
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
技术选型1,前端小程序原生MINA框架cssJavaScriptWxml2,管理后台云开发Cms内容管理系统web网页3,数据后台小程序云开发云函数云开发数据库(基于MongoDB)云存储4,人脸识别算法基于百度智能云实现人脸识别一,用户端效果图预览老规矩我们先来看效果图,如果效果图符合你的需求,就继续往下看,如果不符合你的需求,可以跳过。1-1,登录注册页可以看到登录页有注册入口,注册页如下我们的注册,需要管理员审核,审核通过后才可以正常登录使用小程序1-2,个人中心页登录成功以后,我们会进入个人中心页我们在个人中心页可以注册人脸,因为我们做人脸识别签到,需要先注册人脸才可以进行人脸比对,进
在我的应用程序中我有classUserincludeUser::FooendUser::Foo定义在app/models/user/foo.rb现在我正在使用一个定义了自己的Foo类的库。我收到此错误:warning:toplevelconstantFooreferencedbyUser::FooUser仅引用具有完整路径的Foo,User::Foo,而Foo实际上从来没有指的是Foo。这是怎么回事?更新:才想起我之前遇到过同样的问题,在问题1中看到这里:HowdoIrefertoasubmodule's"fullpath"inruby? 最佳答案
考虑Ruby类Foo::Bar。惯例是将“Foo”命名空间作为一个模块,但它也可以很容易地作为一个类:moduleFoo;classBar;end;end对比:classFoo;classBar;end;end在第二种情况下,Bar不是Foo的内部类,它只是在Foo的单例上定义的另一个常量。在这两种情况下,父类(superclass)都是Object并且它们只包含Kernel模块。它们的祖先链是相同的。因此,除了您可以根据其类使用Foo进行的操作(如果是类则实例化,如果是模块则扩展/包含),命名空间的性质是否对有任何影响酒吧?是否有令人信服的理由选择其中一个名称间距而不是另一个?我看到