UART协议讲解
UART全称是通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),它通常称作UART,是一种异步收发传输器,是设备间进行异步通信的关键模块。UART负责处理数据总线和串行口之间的串/并、并/串转换,并规定了帧格式;通信双方只要采用相同的帧格式和波特率,就能在未共享时钟信号的情况下,仅用两根信号线(RX 和TX)就可以完成通信过程,因此也称为异步串行通信。
UART它可以实现全双工传输和接收。
我们现在可以大概了解什么是UART协议了,那我们下面就应该来详细了解一下它,在这个之前我们先了解一下通信方式的分类,它们是怎样分类的。
通信方式是指通信双方之间的工作方式或信号传输方式。
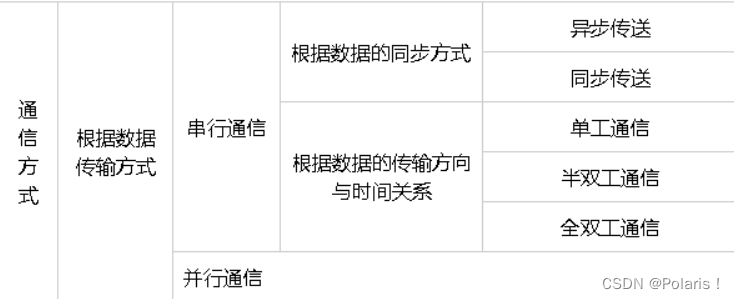
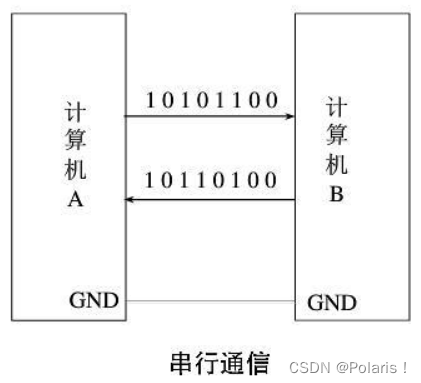
串行通信我的理解就是它利用一条传输线将资料一位位地顺序传送。特点是通信线路简单,利用简单的线缆就可实现通信,降低成本,适用于远距离通信,但传输速度慢的应用场合。也就是说串行通信它就是只有一个传输线,上面的数据是一个一个通过这个线来传输的。
根据通讯的数据同步方式,又分为同步和异步两种。可以根据通讯过程中是否有使用到时钟信号进行简单的区分。
同步通信:
在同步通讯中,收发设备双方会使用一根信号线表示时钟信号,在时钟信号的驱动下双方进行协调,同步数据。通讯中通常双方会统一规定在时钟信号的上升沿或下降沿对数据线进行采样。
异步通信:
在异步通讯中,不使用时钟信号进行数据同步,它们直接在数据信号中穿插一些同步用的信号位,或者把主体数据进行打包,以数据帧的格式传输数据。例如规定由起始位、数据位、奇偶校验位、停止位等。
某些通讯中还需要双方约定数据的传输速率,以便更好地同步 。波特率(bps)是衡量数据传送速率的指标。
串行通信又称为点对点通信,对于点对点之间的通信,根据数据的传输方向与时间关系,又可分为单工通信、半双工通信及全双工通信三种方式。
单工方式:
只允许数据按照一个固定的方向传送,在任何时刻都只能进行一个方向的通信,一个设备固定为发送设备,一个设备固定为接收设备。
半双工方式:
两个设备之间可以收发数据,但是不能在同一时刻进行,每次只能有一个设备发送,另一个站接收。
全双工方式:
在同一时刻,两个设备之间可以同时进行发送和接收数据。
打个比方,单工的这种模式就是,假如说有两个人,其中一个人A 和另一个人B要进行通信,A只能打电话找B,B只能接电话。而B他假如有事的话也只能等着A给他打电话,他不能打打电话给A;也就是说A只能发送数据,B只能接收数据。半双工就是说A他既可以打电话也可以接电话,B也是既可以打电话也可以接电话,但是呢;这两个过程不能同时进行,就是A打电话给B,B接A的电话,这个时间,B是不可以给A打电话的,必须得等到这个过程结束才可以。全双工模式那我们就很好理解了,就是A在打电话的同时还能接B的电话,B在接A电话时还能给A打电话,也就是说它们可以同时进行了;全双工和半双工的区别就是可不可以同时发送和接收数据。
**并行通信:**利用多条传输线将一个数据的各位同时传送。

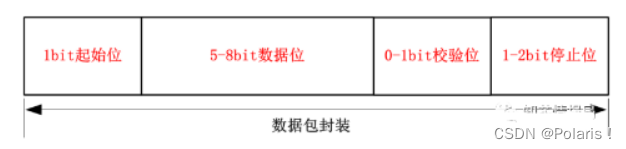
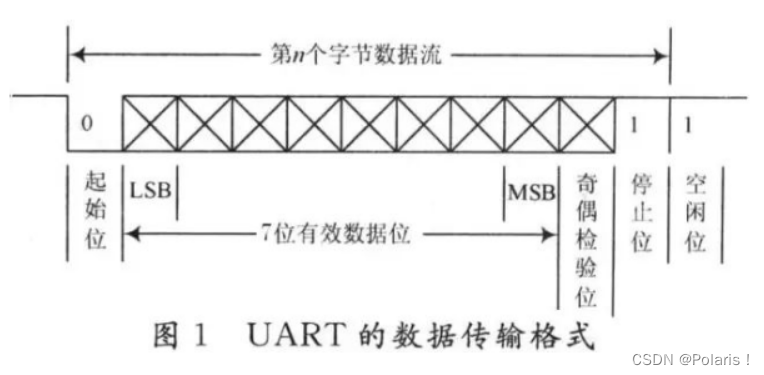
**起始位:**UART数据传输线在空闲状态时时保持高电平。当主机先发出一个逻辑”0”的信号时,表示传输数据的开始。
数据位:可以选择的值有5,6,7,8这四个值,可以传输这么多个值为0或者1的bit位。这个参数最好为8,因为如果此值为其他的值时当你传输的是ASCII值时一般解析肯定会出问题。理由很简单,一个ASCII字符值为8位,如果一帧的数据位为7,那么还有一位就是不确定的值,这样就会出错。
校验位:在串口通信中一种简单的检错方式。有下面四种检错方式:偶校验、奇校验、高校验和低校验。当然没有校验位也是可以的。对于偶和奇校验的情况,串口会设置校验位(数据位后面的一位),用1bit确保传输的数据有偶个或者奇个逻辑高位。
奇偶校验位:
数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性。校验位其实是调整个数,串口校验分几种方式:
停止位:
它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。 由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备之间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟的机会。停止位个数越多,数据传输越稳定,但是数据传输速度也越慢。
数据传输速率
数据的传输速率用波特率表示,即每秒钟传输的的二进制位数。每秒传输的字符数乘以位数即为波特率。只要传输的信号是二进制的,波特率与比特率的概念就是相同的。
波特率和比特率的区别
1、波特率就是每秒传输多少符号
2、比特率就是每秒传输多少比特。
二进制一个符号所含信息量为1比特,因此二进制下波特率=比特率。 计算机处理的都是二进制数,在这个环境下波特率和比特率都一样。
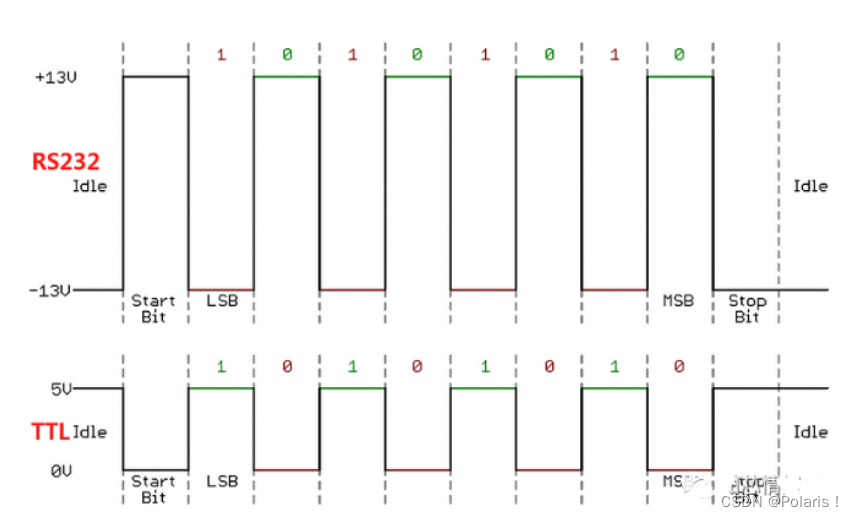
UART使用标准的TTL/CMOS逻辑电平(0-5v,0-3.3v,0-2.5v或0-1.8v)来表示数据,1表示高电平,0表示低电平。为了提高抗干扰能力、提高传输的距离,通常也会TTL/CMOS逻辑电平转换为RS-232逻辑电平,3-15表示0,-3~-15V表示1。
举个例子,对于传输数据0x55,即二进制的01010101,RS232和TTL的区别如下:
优点:
1、通信只需要两条数据线。
2、无需时钟信号。
3、有奇偶校验位,方便通信的差错检查。
4、只需要接收端和发送端设置好数据包结构,即可稳定通信。
缺点:
1、传输速率较低。
2、接口使用一根信号线和一根信号返回线而构成共地的传输形式,这种共地传输容易产生共模干扰,所以抗噪声干扰性弱。
3、传输距离有限,数据帧最大支持9位数据。
https://blog.csdn.net/Rocher_22/article/details/116590629
https://blog.csdn.net/ybhuangfugui/article/details/109465401
https://www.elecfans.com/d/1851379.html
https://blog.csdn.net/qq_21438461/article/details/125663245
https://blog.csdn.net/zxc126534/article/details/124173207
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
尝试通过SSL连接到ImgurAPI时出现错误。这是代码和错误:API_URI=URI.parse('https://api.imgur.com')API_PUBLIC_KEY='Client-ID--'ENDPOINTS={:image=>'/3/image',:gallery=>'/3/gallery'}#Public:Uploadanimage##args-Theimagepathfortheimagetoupload#defupload(image_path)http=Net::HTTP.new(API_URI.host)http.use_ssl=truehttp.verify
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
一、什么是MQTT协议MessageQueuingTelemetryTransport:消息队列遥测传输协议。是一种基于客户端-服务端的发布/订阅模式。与HTTP一样,基于TCP/IP协议之上的通讯协议,提供有序、无损、双向连接,由IBM(蓝色巨人)发布。原理:(1)MQTT协议身份和消息格式有三种身份:发布者(Publish)、代理(Broker)(服务器)、订阅者(Subscribe)。其中,消息的发布者和订阅者都是客户端,消息代理是服务器,消息发布者可以同时是订阅者。MQTT传输的消息分为:主题(Topic)和负载(payload)两部分Topic,可以理解为消息的类型,订阅者订阅(Su
一、RIPV2协议简介 RIP(RoutingInformationProtocol)路由协议是一种相对古老,在小型以及同介质网络中得到了广泛应用的一种路由协议。RIP采用距离向量算法,是一种距离向量协议。RIP-1是有类别路由协议(ClassfulRoutingProtocol),它只支持以广播方式发布协议报文。RIP-1的协议报文无法携带掩码信息,它只能识别A、B、C类这样的自然网段的路由,因此RIP-1不支持非连续子网(DiscontiguousSubnet)。RIP-2是一种无类别路由协议(ClasslessRoutingProtocol),支持路由标记,在路由策略中可根据路由标记对
所以我从维基百科上抓取了这段ruby代码并做了一些修改:@trie=Hash.new()defbuild(str)node=@triestr.each_char{|ch|cur=chprev_node=nodenode=node[cur]ifnode==nilprev_node[cur]=Hash.new()node=prev_node[cur]end}endbuild('dogs')puts@trie.inspect我首先在控制台irb上运行它,每次我输出node时,每次{}都会给我一个空哈希值,但当我实际调用时该函数使用参数'dogs'字符串构建,它确实有效,并输出{"d"=>
运行有问题或需要源码请点赞关注收藏后评论区留言一、利用ContentResolver读写联系人在实际开发中,普通App很少会开放数据接口给其他应用访问。内容组件能够派上用场的情况往往是App想要访问系统应用的通讯数据,比如查看联系人,短信,通话记录等等,以及对这些通讯数据及逆行增删改查。首先要给AndroidMaifest.xml中添加响应的权限配置 下面是往手机通讯录添加联系人信息的例子效果如下分成三个步骤先查出联系人的基本信息,然后查询联系人号码,再查询联系人邮箱代码 ContactAddActivity类packagecom.example.chapter07;importandroid
各位朋友们,大家好啊,今天我要分享的是关于文件操作方面的知识。文章目录为什么会有文件操作什么是文件文件操作文件指针文件的打开与关闭fopen(打开文件)fclose(关闭文件)打开文件的方式文件的顺序读写fgets函数fputc函数fgets函数fputs函数fprintf函数fscanf函数文件的非顺序读写fseek函数ftell函数rewind函数二进制读写fwrite函数`fread函数结语为什么会有文件操作那么大家可能会问:为什么会有文件操作呢?前面我们可能都了解了通讯录,我们知道当我们使用通讯录的时候我们可以添加联系人,也可以删除联系人,但是当我们退出程序之后下次再进来的时候,我们要
我尝试执行此页面中显示的ruby示例:http://tomayko.com/writings/unicorn-is-unix但我得到的只是echo.rb:9:in`bind':Addressfamilynotsupportedbyprotocolfamily-bind(2)(Errno::EAFNOSUPPORT)fromecho.rb:9:in`'有什么想法吗? 最佳答案 我遇到了同样的问题。只需将localhost更改为0.0.0.0:address=Socket.pack_sockaddr_in(4242,'0.0.0.0')