 想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com
想了解更多关于开源的内容,请访问:51CTO 开源基础软件社区https://ost.51cto.com
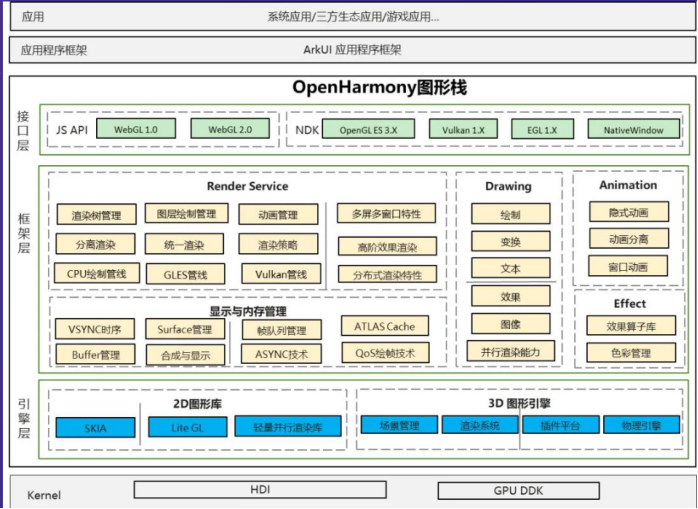 RenderService新框架主要分为。接口层:为ArkUI应用提供的图形Native API能力。框架层:图形子系统核心框架。引擎层:提供底层图形库和适配能力。
RenderService新框架主要分为。接口层:为ArkUI应用提供的图形Native API能力。框架层:图形子系统核心框架。引擎层:提供底层图形库和适配能力。 Mesa可以划分为前端和后端:前端包括libGL、libEGL、libgbm、libglapi等,后端为libgallium_dri。Mesa随着时间,演进为Gallium3D架构后,可以通过Gallium模块加不同平台相关的Backend实现,进一步分割了Vendor HW driver 模块以及与平台窗口系统,使系统更加模块化。
Mesa可以划分为前端和后端:前端包括libGL、libEGL、libgbm、libglapi等,后端为libgallium_dri。Mesa随着时间,演进为Gallium3D架构后,可以通过Gallium模块加不同平台相关的Backend实现,进一步分割了Vendor HW driver 模块以及与平台窗口系统,使系统更加模块化。OpenHarmony3.1Release及之后的版本已经使用新的RenderService渲染框架替换了原来的Weston。RenderService提供了更强的2D/3D绘制能力、新的动画和显示效果框架。 OpenHarmony社区已经将Mesa库移植到了系统中,在三方库目录内,路径:third_party/mesa3d ,其中Mesa/ohos是OpenHarmony的工程编译目录,提供了适配好的编译脚本,支持交叉编译。基于Render Service新显示框架,需要使用build_ohos.py编译脚本,build_wayland_and_gbm.py是针对旧的Weston显示框架的编译脚本。其中的BUILD.gn 中可以看到:
OpenHarmony社区已经将Mesa库移植到了系统中,在三方库目录内,路径:third_party/mesa3d ,其中Mesa/ohos是OpenHarmony的工程编译目录,提供了适配好的编译脚本,支持交叉编译。基于Render Service新显示框架,需要使用build_ohos.py编译脚本,build_wayland_and_gbm.py是针对旧的Weston显示框架的编译脚本。其中的BUILD.gn 中可以看到:source = "gpu/libEGL.so.1.0.0"
install_enable = true
install_images = [ chipset_base_dir ]
relative_install_dir = "chipsetsdk"
subsystem_name = "xxx_products"
part_name = “xxx_products"
symlink_target_name = [
"libEGL.so.1",
"libEGL.so",
"libGLESv1.so",
"libEGL_impl.so",
]
}libEGL.so.1
libEGL.so,
libGLESv1.so,
libEGL_impl.so#cp build-ohos/install/lib/libGLESv1_CM.so.1.1.0 ../device/<…>/hardware/gpu/
#cp build-ohos/install/lib/libGLESv2.so.2.0.0 ../device/<…>/hardware/gpu/
#cp build-ohos/install/lib/libgbm.so.1.0.0 ../device/<…>/hardware/gpu/
#cp build-ohos/install/lib/libglapi.so.0.0.0 ../device/<…>/hardware/gpu/
#cp build-ohos/src/gallium/targets/dri/libgallium_dri.so ../device/<…>/hardware/gpu/
#cp build-ohos/install/lib/dri/panfrost_dri.so ../device/<…>/hardware/gpu/constexpr const char *VENDOR_LIB_PATH = "/vendor/lib64/chipsetsdk/";
constexpr const char *SYSTEM_LIB_PATH = "/system/lib64/";
#else
constexpr const char *VENDOR_LIB_PATH = "/vendor/lib/chipsetsdk/";
constexpr const char *SYSTEM_LIB_PATH = "/system/lib/";
#endif
#ifdef PRODUCT_RK3568
constexpr const char *LIB_EGL_NAME = "libEGL_impl.so";
constexpr const char *LIB_GLESV1_NAME = "libGLESv1_impl.so";
constexpr const char *LIB_GLESV2_NAME = "libGLESv2_impl.so";
constexpr const char *LIB_GLESV3_NAME = "libGLESv3_impl.so";
#else
constexpr const char *LIB_EGL_NAME = "libEGL.so.1.0.0";
constexpr const char *LIB_GLESV1_NAME = "libGLESv1_CM.so.1.1.0";
constexpr const char *LIB_GLESV2_NAME = "libGLESv2.so.2.0.0";
constexpr const char *LIB_GLESV3_NAME = "libGLESv2.so.2.0.0";
#endif
}vendor/…/config.json
{
"subsystem": "graphic",
"components": [
{
"component": "graphic_standard",
"features": [
"graphic_standard_feature_ace_enable_gpu = true",
"graphic_standard_feature_rs_enable_eglimage = true"
]
}
]
},CONFIG_DRM_GEM_SHMEM_HELPER=y
CONFIG_DRM_SCHED=y
CONFIG_DRM_PANFROST=y# CONFIG_DRIVERS_HDF_DISP is not set
#./render_service_client_app_demo
#./render_service_client_gravity_demo
#./render_service_client_modifier_demo
#./render_service_client_rs_demo我得到了一个包含嵌套链接的表单。编辑时链接字段为空的问题。这是我的表格:Editingkategori{:action=>'update',:id=>@konkurrancer.id})do|f|%>'Trackingurl',:style=>'width:500;'%>'Editkonkurrence'%>|我的konkurrencer模型:has_one:link我的链接模型:classLink我的konkurrancer编辑操作:defedit@konkurrancer=Konkurrancer.find(params[:id])@konkurrancer.link_attrib
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
所以我在关注Railscast,我注意到在html.erb文件中,ruby代码有一个微弱的背景高亮效果,以区别于其他代码HTML文档。我知道Ryan使用TextMate。我正在使用SublimeText3。我怎样才能达到同样的效果?谢谢! 最佳答案 为SublimeText安装ERB包。假设您安装了SublimeText包管理器*,只需点击cmd+shift+P即可获得命令菜单,然后键入installpackage并选择PackageControl:InstallPackage获取包管理器菜单。在该菜单中,键入ERB并在看到包时选择
我试图在索引页中创建一个超链接,但它没有显示,也没有给出任何错误。这是我的index.html.erb代码。ListingarticlesTitleTextssss我检查了我的路线,我认为它们也没有问题。PrefixVerbURIPatternController#Actionwelcome_indexGET/welcome/index(.:format)welcome#indexarticlesGET/articles(.:format)articles#indexPOST/articles(.:format)articles#createnew_articleGET/article
我是rails的新手,想在form字段上应用验证。myviewsnew.html.erb.....模拟.rbclassSimulation{:in=>1..25,:message=>'Therowmustbebetween1and25'}end模拟Controller.rbclassSimulationsController我想检查模型类中row字段的整数范围,如果不在范围内则返回错误信息。我可以检查上面代码的范围,但无法返回错误消息提前致谢 最佳答案 关键是您使用的是模型表单,一种显示ActiveRecord模型实例属性的表单。c
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
目前,Itembelongs_toCompany和has_manyItemVariants。我正在尝试使用嵌套的fields_for通过Item表单添加ItemVariant字段,但是使用:item_variants不显示该表单。只有当我使用单数时才会显示。我检查了我的关联,它们似乎是正确的,这可能与嵌套在公司下的项目有关,还是我遗漏了其他东西?提前致谢。注意:下面的代码片段中省略了不相关的代码。编辑:不知道这是否相关,但我正在使用CanCan进行身份验证。routes.rbresources:companiesdoresources:itemsenditem.rbclassItemi
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶