(本文为作者期末复习时所写,内容源自教材《图论与代数结构》戴一奇等著,结合了作者本人的一些理解,如有错误,请指出!)2.1道路与回路1.【定义】(有向图)简单有向道路简单有向回路:边不重复出现初级有向道路初级有向回路:点不重复出现2.【定义】(无向图)有向道路有向回路:点边交替序列3.【定义】弦【定理】简单图G中,若每一个点的度数d(v)>=3,则G中一定含有带弦回路证明思路:(构造法)在G中找到一条极长初级道路,道路的上的点分别记为v0,v1,v2...对于v0,与其相邻的点除了v1外至少有两个,这些点应该在这条初级道路上,否则这条初级道路将可以延长,不符合题目中的“极长”。不妨设={v1,
目录1.介绍2.代码实现1.介绍顶帽变换和底帽变换就是图像的加减和开闭运算的结合顶帽变换的公式为:原图-原图的开运算 这里结合开运算的几何图形解释来介绍顶帽变换。 因为开运算是结构元从下往上推动的过程,所以会删除图像灰度值相对周围高的亮点,而其他的区域影响是不大的。那么原图-原图的开运算的话,就是保留灰度值较高的亮点,顶帽运算相当于把开运算删除的亮点补回来了。 并且,可以发现,open运算的图像灰度值均底帽变换的公式为:图像闭运算-原图 这里结合闭运算的几何图形解释来介绍底帽变换。 因为闭运算是结构元从上往下推动的过程,所以会删除图像灰度值相对周围低的暗点,而其他的区域影响是不大的。那么原图的
1.学习目标学习图像的缩放矩阵;学习OpenCV图像缩放函数cv.resize和cv.warpAffine。2.图像的缩放矩阵缩放是物体在x轴和y轴的缩放比例。fx是图像在x轴的缩放比例,fy是图像在y轴的缩放比例,公式:3.图像缩放函数3.1cv.warpAffine()函数使用cv.warpAffine(src,M,dsize[,dst[,flags[,borderMode[,borderValue]]]])→dst3.2参数说明参数说明src表示输入图像。M表示变换矩阵,2行3列。dsize表示输出图像的大小,二元元组(width,height)。dst表示变换操作的输出图像,可选项。f
目录1.已知某离散系统的差分方程为y(k)-y(k-1)+0.9y(k-3)=f(k)试作出:2.已知某系统的系统函数如下y(k+2)+0.4y(k+1)-0.12y(k)=f(k+2)+2f(k+1)计算在输入信号为f(k)=u(k)时的系统零状态响3.求下列离散时间序列的z变换4.采用变换域分析法求解系统的零状态响应5.已知某离散时间系统的系统函数如下H(z)=z^2/(z^2+2^0.5·z+1) 1.已知某离散系统的差分方程为y(k)-y(k-1)+0.9y(k-3)=f(k)试作出:(1)以默认方式绘出系统h(k)的时域波形;(2)绘出系统在0~60取样点范围内h(k)的时域波形;(
一、前言本文章将着重讲解图形学中的MVP矩阵变换,更注重当前阶段的理解,而不是纵观全局,如果想纵观全局,网上有很多资料,也可以等我更新,不过在这里,我不会给大家一个宏观的概念,也不会去细扣渲染管线。适用于刚接触图形学的新手,(本校数媒专业上完前两周图形学的人)。这部分知识在GAMES101也有,我上学期已经看过了,所以对我来说是复习回顾,对各位来说是前瞻预习,想学好任何一门知识,刨根问到底的精神是必不可少的,图形学也是一样,值得一提的是,图形学发展至今,其中有许多定义都是人为规定的,大多是为了简化计算和理解,所以问到这个维度的时候,一般来说已经是问到底了,所以不必再深追究。本文对我来说也算是一
1、认识仿射变换仿射变换(AffineMap)又称仿射映射,是指在几何中,一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间的过程。保持二维图形之间的相对位置保持不变,平行线依然是平行线,且直线上的点的位置顺序不变。一个任意的仿射变换都可以表示为乘以一个矩阵接着再加上一个向量的形式。三种常见的变换形式:旋转:ratation(线性变换)平移:translation(向量加)缩放:scale(线性变换)通常使用2x3的矩阵来表示仿射变换:2、仿射变换的求法说明:仿射变换表示的就是两幅图片之间的一种联系,关于这种联系的信息大致可以分为以下两种场景:已知X和T,而且已知它们是有联系的,
Threejs的官方文档教程中给予了很多的Geomerty来构造不同类别的三维多边形,例如立方体BoxGeometry、圆柱体CylinderGeometry、球体SphereGeometry等Three.js几何体类都是基于基类BufferGeometry二次封装。Geometry对原生WebGL中的顶点位置position、顶点法向量normal、顶点颜色color、顶点纹理坐标uv、顶点索引index等顶点数据进行了封装,关于Geometry顶点更多介绍可以在学习的过程中通过官方文档或者b站的视频来练习。但是如果第一次接触到顶点的概念,没有原生WebGL基础,建议学习下原生WebGL教程
如果一个无向图的每个顶点的度数均为k,则称其为k−正则图。考虑n阶3−正则简单图,并且边数m与顶点数n满足:2n−3=m请问,这样的无向图有几种非同构的情况。画出每种情况对应的图。解:由握手定理可知3n=2m∵\because∵2n-3=m联立可得m=9,n=6∴\therefore∴度数之和为18满足题目条件的度数列为(3,3,3,3,3,3)有两种非同构的情况,如下图所示2下面哪些数列是可图化的,哪些是可简单图化的?请给出你的理由。对于可简单图化的,请给出对应的简单图。(1)(4,3,2,1)(2)(5,4,3,2,1)(3)(6,6,5,5,3,3,2)(4)(5,5,3,3,2,2,1
相机位姿变换项目场景相机位姿旋转变换求平面方程求法向量求旋转矩阵平移变换尺度变换变换顺序项目场景将自定义数据的影像数据规范化到2×2的一个立方体内进行训练。由于影像的相机位置近似在一个平面上,且场景主要在相机位置下方。所以也就是说要把这些相机位姿变换到立方体的上方的表面上。这样训练对象就能落到训练场景内,并在场景内近似居中,有利于训练。其实就是一个求七参数(三个平移量、三个旋转角、一个尺度因子)进行空间直角坐标系转换的过程。由于metashape或者colmap等通过匹配导出的相机位姿通常是以第一张相片的相机坐标系为参考的,那么在进一步处理时就需要对其进行位姿变换(另外也要注意模型中使用的相机
文章目录3D变换缩放(Scale)平移(Translation)旋转(Rotation)3D旋转(3DRotation)什么是欧拉角罗德里格斯旋转公式(Rodrigues'RotationFormula)Viewingtransformation什么是View/CameraTransformation相机标准位置(约定俗成)怎样将一个相机从一个任意的摆放,放到一个标准位置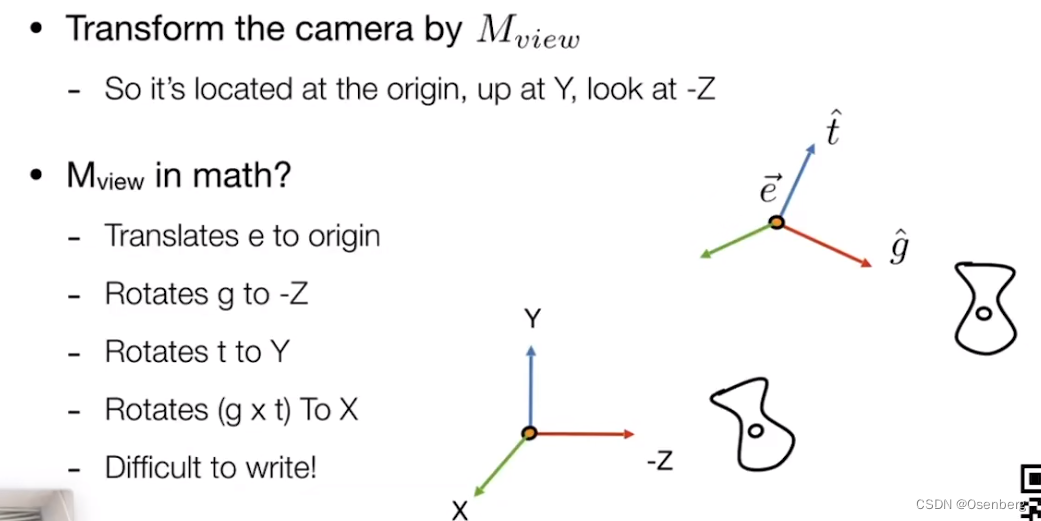使用数学方式表示相机到标准位置的变换投影变换(ProjectionTr