强化学习PPO算法
最近再改一个代码,需要改成PPO方式的,由于之前没有接触过此类算法,因此进行了简单学习,论文没有看的很详细,重点看了实现部分,这里只做简单记录。
这里附上论文链接,需要的可以详细看一下。
Proximal Policy Optimization Algorithms.
PPO算法本质上是一个On-Policy的算法,它可以对采样到的样本进行多次利用,在一定程度上解决样本利用率低的问题,收到较好的效果。论文里有两种实现方式,一种是结合KL的penalty的,另一种是clip裁断的方法。大部分都是采用的后者,本文记录的也主要是后者的实现。
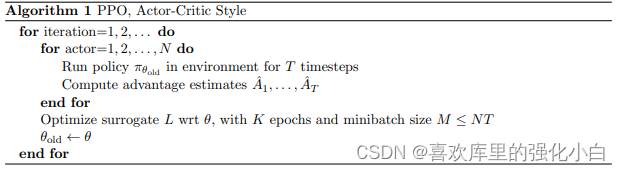
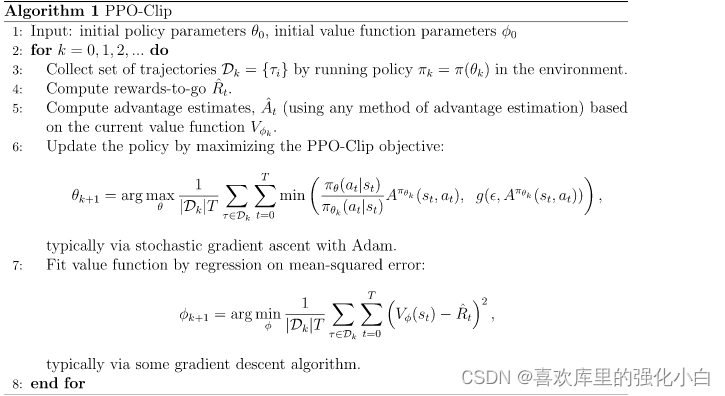
在网上找了一下伪代码,大概两类,前者是Open AI的,比较精炼,后者是Deepmind的,写的比较详细,在这里同时附上.

这里的比例ratio,是两种策略下动作的概率比,而在程序实现中,用的是对动作分布取对数,而后使用e指数相减的方法,具体实现如下所示:
action_logprobs = dist.log_prob(action)
ratios = torch.exp(logprobs - old_logprobs.detach())

其中,裁断对应的部分如下图所示:
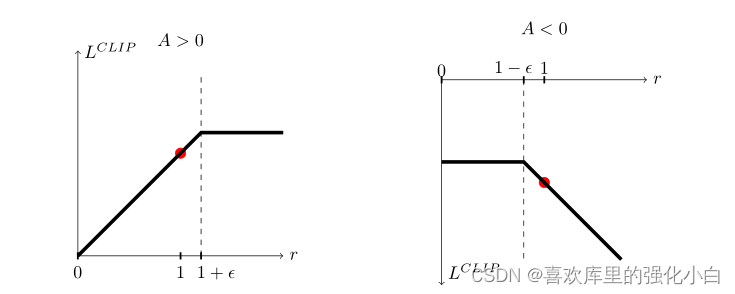
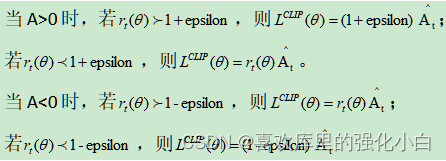
上述公式代表的含义如下:
clip公式含义.
这里我是这样理解的:
(1)如果A>0,说明现阶段的(st,at)相对较好,那么我们希望该二元组出现的概率越高越好,即ratio中的分子越大越好,但是分母分子不能差太多,因此需要加一个上限;
(2)如果A<0,说明现阶段的(st,at)相对较差,那么我们希望该二元组出现的概率越低越好,即ratio中的分子越小越好,但是分母分子不能差太多,因此需要加一个下限.
论文里计算At的方式如下,在一些情况下可以令lamda为1;还有一种更常用的计算方式是VAE,这里不进行描述.。

对应的代码块如下:
def update(self, memory):
# Monte Carlo estimate of rewards:
rewards = []
discounted_reward = 0
for reward, is_terminal in zip(reversed(memory.rewards), reversed(memory.is_terminals)):
if is_terminal:
discounted_reward = 0
discounted_reward = reward + (self.gamma * discounted_reward)
rewards.insert(0, discounted_reward)

这里的第一项,对应裁断项,需要计算ratio和Advantage,之后进行裁断;
这里的第二项,对应的为对应的值的均方误差;
这里的第三项,为交叉熵
程序的实现如下所示:
surr1 = ratios * advantages
surr2 = torch.clamp(ratios, 1 - self.eps_clip, 1 + self.eps_clip) * advantages
loss = -torch.min(surr1, surr2) + 0.5 * self.MseLoss(state_values, rewards) - 0.01 * dist_entropy
这里算法的实现参考了一位博主
PPO代码.
#!/usr/bin/python3
# -*-coding:utf-8 -*-
# @Time : 2022/6/18 15:53
# @Author : Wang xiangyu
# @File : PPO.py
import torch
import torch.nn as nn
from torch.distributions import MultivariateNormal
import gym
import numpy as np
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
class Memory:
def __init__(self):
self.actions = []
self.states = []
self.logprobs = []
self.rewards = []
self.is_terminals = []
def clear_memory(self):
# del语句作用在变量上,而不是数据对象上。删除的是变量,而不是数据。
del self.actions[:]
del self.states[:]
del self.logprobs[:]
del self.rewards[:]
del self.is_terminals[:]
class ActorCritic(nn.Module):
def __init__(self, state_dim, action_dim, action_std):
super(ActorCritic, self).__init__()
# action mean range -1 to 1
self.actor = nn.Sequential(
nn.Linear(state_dim, 64),
nn.Tanh(),
nn.Linear(64, 32),
nn.Tanh(),
nn.Linear(32, action_dim),
nn.Tanh()
)
# critic
self.critic = nn.Sequential(
nn.Linear(state_dim, 64),
nn.Tanh(),
nn.Linear(64, 32),
nn.Tanh(),
nn.Linear(32, 1)
)
# 方差
self.action_var = torch.full((action_dim,), action_std * action_std).to(device)
def forward(self):
# 手动设置异常
raise NotImplementedError
def act(self, state, memory):
action_mean = self.actor(state)
cov_mat = torch.diag(self.action_var).to(device)
dist = MultivariateNormal(action_mean, cov_mat)
action = dist.sample()
action_logprob = dist.log_prob(action)
memory.states.append(state)
memory.actions.append(action)
memory.logprobs.append(action_logprob)
return action.detach()
def evaluate(self, state, action):
action_mean = self.actor(state)
action_var = self.action_var.expand_as(action_mean)
# torch.diag_embed(input, offset=0, dim1=-2, dim2=-1) → Tensor
# Creates a tensor whose diagonals of certain 2D planes (specified by dim1 and dim2) are filled by input
cov_mat = torch.diag_embed(action_var).to(device)
# 生成一个多元高斯分布矩阵
dist = MultivariateNormal(action_mean, cov_mat)
# 我们的目的是要用这个随机的去逼近真正的选择动作action的高斯分布
action_logprobs = dist.log_prob(action)
# log_prob 是action在前面那个正太分布的概率的log ,我们相信action是对的 ,
# 那么我们要求的正态分布曲线中点应该在action这里,所以最大化正太分布的概率的log, 改变mu,sigma得出一条中心点更加在a的正太分布。
dist_entropy = dist.entropy()
state_value = self.critic(state)
return action_logprobs, torch.squeeze(state_value), dist_entropy
class PPO:
def __init__(self, state_dim, action_dim, action_std, lr, betas, gamma, K_epochs, eps_clip):
self.lr = lr
self.betas = betas
self.gamma = gamma
self.eps_clip = eps_clip
self.K_epochs = K_epochs
self.policy = ActorCritic(state_dim, action_dim, action_std).to(device)
self.optimizer = torch.optim.Adam(self.policy.parameters(), lr=lr, betas=betas)
self.policy_old = ActorCritic(state_dim, action_dim, action_std).to(device)
self.policy_old.load_state_dict(self.policy.state_dict())
self.MseLoss = nn.MSELoss()
def select_action(self, state, memory):
state = torch.FloatTensor(state.reshape(1, -1)).to(device)
return self.policy_old.act(state, memory).cpu().data.numpy().flatten()
def update(self, memory):
# Monte Carlo estimate of rewards:
rewards = []
discounted_reward = 0
for reward, is_terminal in zip(reversed(memory.rewards), reversed(memory.is_terminals)):
if is_terminal:
discounted_reward = 0
discounted_reward = reward + (self.gamma * discounted_reward)
rewards.insert(0, discounted_reward)
# Normalizing the rewards:
rewards = torch.tensor(rewards, dtype=torch.float32).to(device)
rewards = (rewards - rewards.mean()) / (rewards.std() + 1e-5)
# convert list to tensor
# 使用stack可以保留两个信息:[1. 序列] 和 [2. 张量矩阵] 信息,属于【扩张再拼接】的函数;
old_states = torch.squeeze(torch.stack(memory.states).to(device), 1).detach()
old_actions = torch.squeeze(torch.stack(memory.actions).to(device), 1).detach()
old_logprobs = torch.squeeze(torch.stack(memory.logprobs), 1).to(device).detach()
#这里即可以对样本进行多次利用,提高利用率
# Optimize policy for K epochs:
for _ in range(self.K_epochs):
# Evaluating old actions and values :
logprobs, state_values, dist_entropy = self.policy.evaluate(old_states, old_actions)
# Finding the ratio (pi_theta / pi_theta__old):
ratios = torch.exp(logprobs - old_logprobs.detach())
# Finding Surrogate Loss:
advantages = rewards - state_values.detach()
surr1 = ratios * advantages
surr2 = torch.clamp(ratios, 1 - self.eps_clip, 1 + self.eps_clip) * advantages
loss = -torch.min(surr1, surr2) + 0.5 * self.MseLoss(state_values, rewards) - 0.01 * dist_entropy
# take gradient step
self.optimizer.zero_grad()
loss.mean().backward()
self.optimizer.step()
# Copy new weights into old policy:
self.policy_old.load_state_dict(self.policy.state_dict())
def main():
############## Hyperparameters ##############
env_name = "Pendulum-v1"
render = False
solved_reward = 300 # stop training if avg_reward > solved_reward
log_interval = 20 # print avg reward in the interval
max_episodes = 10000 # max training episodes
max_timesteps = 1500 # max timesteps in one episode
update_timestep = 4000 # update policy every n timesteps
action_std = 0.5 # constant std for action distribution (Multivariate Normal)
K_epochs = 80 # update policy for K epochs
eps_clip = 0.2 # clip parameter for PPO
gamma = 0.99 # discount factor
lr = 0.0003 # parameters for Adam optimizer
betas = (0.9, 0.999)
#############################################
# creating environment
env = gym.make(env_name)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.shape[0]
memory = Memory()
ppo = PPO(state_dim, action_dim, action_std, lr, betas, gamma, K_epochs, eps_clip)
print(lr, betas)
# logging variables
running_reward = 0
avg_length = 0
time_step = 0
# training loop
for i_episode in range(1, max_episodes + 1):
state = env.reset()
for t in range(max_timesteps):
time_step += 1
# Running policy_old:
action = ppo.select_action(state, memory)
state, reward, done, _ = env.step(action)
# Saving reward and is_terminals:
memory.rewards.append(reward)
memory.is_terminals.append(done)
# update if its time
if time_step % update_timestep == 0:
ppo.update(memory)
memory.clear_memory()
time_step = 0
running_reward += reward
if render:
env.render()
if done:
break
avg_length += t+1
# stop training if avg_reward > solved_reward
if running_reward > (log_interval * solved_reward):
print("########## Solved! ##########")
torch.save(ppo.policy.state_dict(), './PPO_continuous_solved_{}.pth'.format(env_name))
break
# save every 500 episodes
if i_episode % 500 == 0:
torch.save(ppo.policy.state_dict(), './PPO_continuous_{}.pth'.format(env_name))
# logging
if i_episode % log_interval == 0:
avg_length = int(avg_length / log_interval)
running_reward = int((running_reward / log_interval))
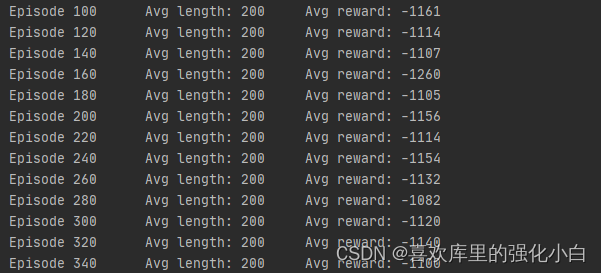
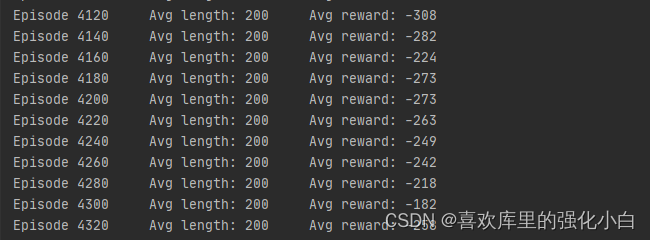
print('Episode {} \t Avg length: {} \t Avg reward: {}'.format(i_episode, avg_length, running_reward))
running_reward = 0
avg_length = 0
if __name__ == '__main__':
main()
可以看到经过一段时间的训练,奖励有了一定升高.
感悟是对改的项目的总结,和本文没有什么关系。
这次改的项目参考了PPO的代码,架子基本也是搭好的,所以改起来也没有想象的那么困难。但应该是我第一次改代码,之前只是看代码,从来没有尝试改过那么多,可以感觉到看代码和改代码这两个能力间差的真的很多,写代码就更困难了emm,可以说经过这一次,可以更好的看到和别人的差距,不过对自己也有很大提高。在以后的学习中,还是需要多看多写,逐步提高。
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
如何学习ruby的正则表达式?(对于假人) 最佳答案 http://www.rubular.com/在Ruby中使用正则表达式时是一个很棒的工具,因为它可以立即将结果可视化。 关于ruby-我如何学习ruby的正则表达式?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/1881231/
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
写在之前Shader变体、Shader属性定义技巧、自定义材质面板,这三个知识点任何一个单拿出来都是一套知识体系,不能一概而论,本文章目的在于将学习和实际工作中遇见的问题进行总结,类似于网络笔记之用,方便后续回顾查看,如有以偏概全、不祥不尽之处,还望海涵。1、Shader变体先看一段代码......Properties{ [KeywordEnum(on,off)]USL_USE_COL("IsUseColorMixTex?",int)=0 [Toggle(IS_RED_ON)]_IsRed("IsRed?",int)=0}......//中间省略,后续会有完整代码 #pragmamulti_c