目录
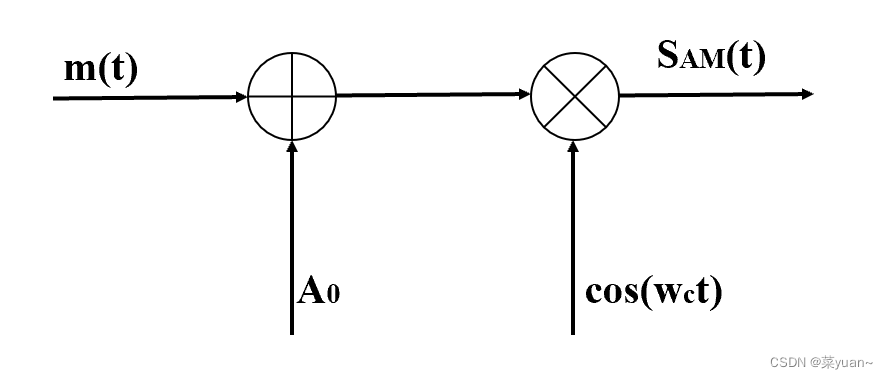
AM的调制原理如下图所示,基带信号m(t)和直流量A0相加,然后和高频载波相乘实现AM信号的调制。
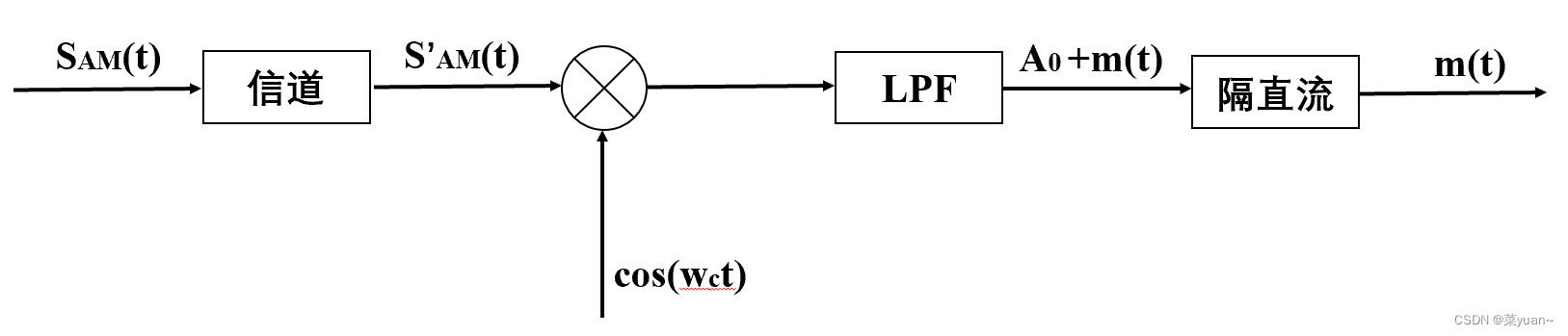
AM的解调原理如下图所示,AM信号经过信道传输之后,再和载波相乘,然后经过低通滤波,隔直流之后恢复出原始基带信号。
AM.m文件,主文件
% AM调制解调过程
%% 基本参数
clear all; % 清除变量
close all; % 关闭所有窗口图像
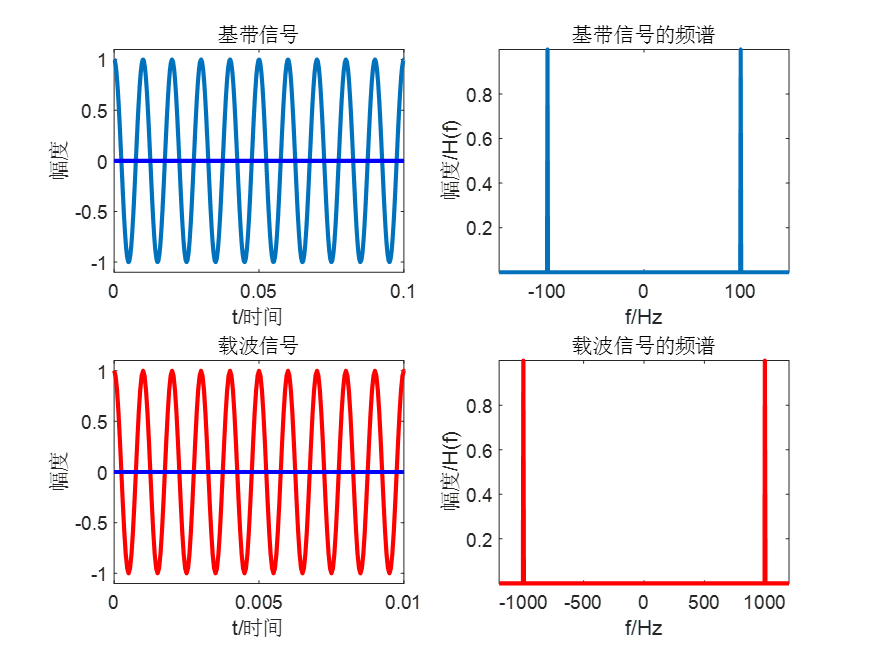
fm = 100; % 基带信号频率
T = 2; % 信号时长
fs = 20000; % 采样频率 奈奎斯特采样定理为最大频率的两倍,这里取20倍为了绘制更多的细节,让时域信号更平滑
dt=1/fs; % 时间采样间隔,采样频率的倒数
N=T/dt; % 采样点个数,总时长除以采样间隔
t=[0:N-1]*dt; % 采样点的时间序列,作为横坐标
%% ******************调制信号时域波形******************
Am=1; % 基带信号幅度
mt=Am*cos(2*pi*fm*t); % 基带信号
figure(1); % 绘制第一幅图
subplot(221); % 窗口分割,将一幅图分割成2*2的
plot(t,mt,'Linewidth',2); % 时间t为横坐标,基带信号mt为纵坐标绘图,线宽为2
xlabel('t/时间'); % 横坐标标注
ylabel('幅度'); % 纵坐标标注
title('基带信号'); % 图标题标注
axis([0,0.1,-1.1,1.1]); % 横纵坐标范围设置
line([0,0.1],[0,0],'color','b','Linewidth',2);% 绘制一条从(0,0)到(0.1,0)的蓝色实线,线宽为2
%% ******************调制信号频域波形******************
subplot(222);
[mf,msf]=T2F(t,mt); % 傅里叶变换,得到纵坐标频谱和横坐标频率
plot(mf,abs(msf),'Linewidth',2); % 画出基带信号频谱,线宽为2
title('基带信号的频谱'); % 图标题标注
xlabel('f/Hz'); % 横坐标标注
ylabel('幅度/H(f)'); % 纵坐标标注
axis([-150 150 -inf inf]); % 横纵坐标范围设置
%% ******************载波信号时域波形******************
subplot(223);
fc=1000; % 载波频率
zaibo=cos(2*pi*fc*t); % 载波时域信号
plot(t,zaibo,'r','Linewidth',2); % 时间t为横坐标,载波信号zaibo为纵坐标绘图,线宽为2,红色
xlabel('t/时间'); % 横坐标标注
ylabel('幅度'); % 纵坐标标注
title('载波信号'); % 图标题标注
axis([0,0.01,-1.1,1.1]); % 横纵坐标范围设置
line([0,0.01],[0,0],'color','b','Linewidth',2);% 绘制一条从(0,0)到(0.01,0)的蓝色实线,线宽为2
%% ******************载波信号频域波形******************
subplot(224);
[mf1,msf1]=T2F(t,zaibo); % 傅里叶变换,得到纵坐标频谱和横坐标频率
plot(mf1,abs(msf1),'r','Linewidth',2); % 载波信号频谱,线宽为2,红色
title('载波信号的频谱'); % 图标题标注
xlabel('f/Hz'); % 横坐标标注
ylabel('幅度/H(f)'); % 纵坐标标注
axis([-1200 1200 -inf inf]); % 横纵坐标范围设置
%% ******************AM波信号时域波形******************
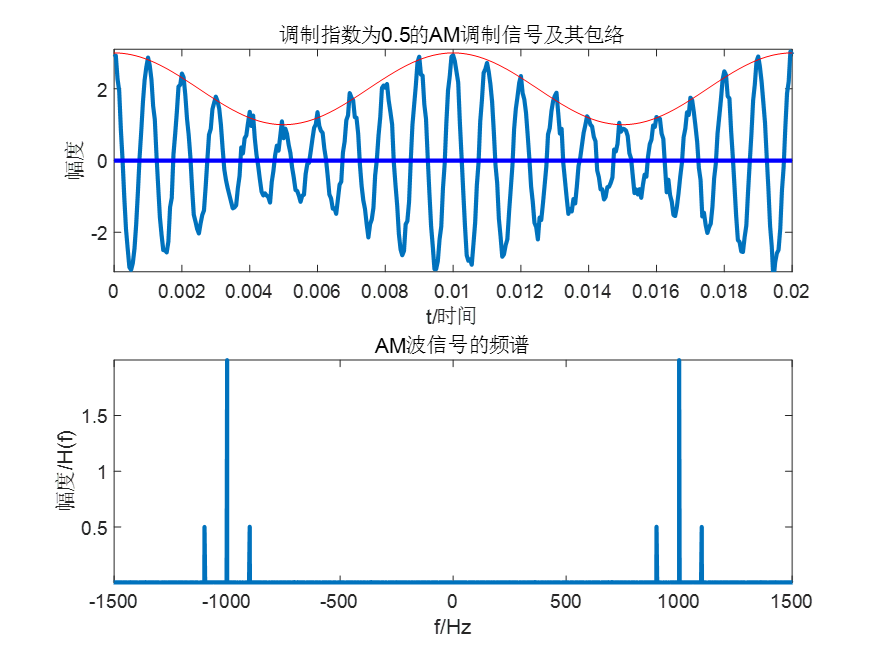
Ma=0.5; % 调制指数
A0=Am/Ma; % 直流信号幅度
sam=(A0+mt).*zaibo; % 画出AM信号波形
%% 加噪声
SNR=20; %信噪比为 dB
sam=awgn(sam,SNR,'measured');
figure(2); % 绘制第二幅图
subplot(211); % 窗口分割,将一幅图分割成2*1的
plot(t,sam,'Linewidth',2); % 画出AM信号波形,线宽为2
hold on; % 当前轴及图像保持而不被刷新,准备接受此后将绘制的图形,多图共存
plot(t,A0+mt,'r-'); % 画出AM信号包络,红色实线
title('调制指数为0.5的AM调制信号及其包络');% 图标题标注
xlabel('t/时间'); % 横坐标标注
ylabel('幅度'); % 纵坐标标注
axis([0,0.02,-3.1,3.1]); % 横纵坐标范围设置
line([0,0.02],[0,0],'color','b','Linewidth',2);% 绘制一条从(0,0)到(0.02,0)的蓝色实线,线宽为2
%% ******************AM波信号频域波形******************
[mf2,msf2]=T2F(t,sam); % 傅里叶变换,得到纵坐标频谱和横坐标频率
subplot(212);
plot(mf2,abs(msf2),'Linewidth',2); % 画出AM信号频谱
title('AM波信号的频谱'); % 图标题标注
xlabel('f/Hz'); % 横坐标标注
ylabel('幅度/H(f)'); % 纵坐标标注
axis([-1500 1500 -inf inf]); % 横纵坐标范围设置
%% ******************相干解调******************
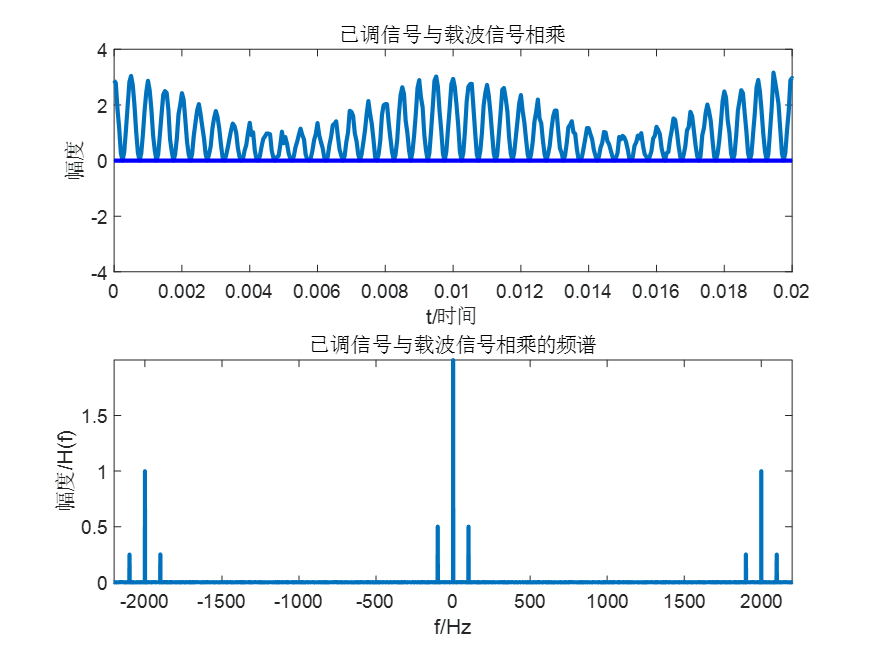
%% ******************已调信号与载波信号相乘******************
st=sam.*zaibo; % 已调信号与载波信号相乘
figure(3); % 绘制第三幅图
subplot(211); % 窗口分割,将一幅图分割成2*1的
plot(t,st,'Linewidth',2); % 时间t为横坐标,相乘信号st为纵坐标绘图,线宽为2
title('已调信号与载波信号相乘'); % 图标题标注
xlabel('t/时间'); % 横坐标标注
ylabel('幅度'); % 纵坐标标注
axis([0 0.02 -4 4]); % 横纵坐标范围设置
line([0,0.02],[0,0],'color','b','Linewidth',2);% 绘制一条从(0,0)到(0.02,0)的蓝色实线,线宽为2
%% ******************已调信号与载波信号相乘的频谱******************
[f,sf]=T2F(t,st); % 傅里叶变换,得到纵坐标频谱和横坐标频率
subplot(212); % 窗口分割,将一幅图分割成2*1的
plot(f,sf,'Linewidth',2); % 绘制相乘信号st的频谱,线宽为2
title('已调信号与载波信号相乘的频谱');% 图标题标注
xlabel('f/Hz'); % 横坐标标注
ylabel('幅度/H(f)'); % 纵坐标标注
axis([-2200 2200 -inf inf]); % 横纵坐标范围设置
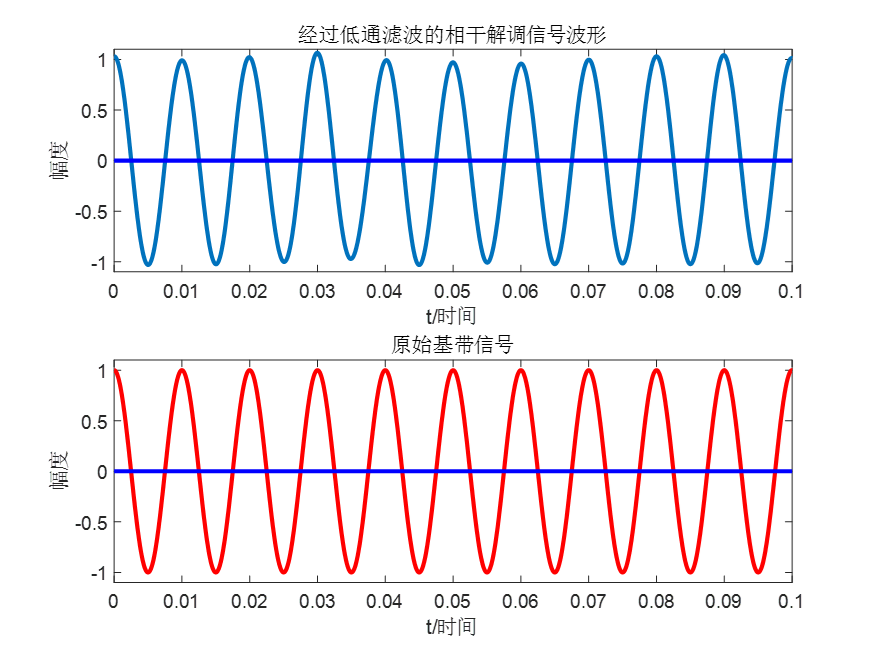
%% ******************解调出来的信号******************
[t,st]=lpf(f,sf,2*fm); % 频域低通滤波
figure(4); % 绘制第三幅图
subplot(211); % 窗口分割,将一幅图分割成2*1的
plot(t,2*st-A0,'Linewidth',2); % 绘制解调波形
title('经过低通滤波的相干解调信号波形');% 图标题标注
xlabel('t/时间'); % 横坐标标注
ylabel('幅度'); % 纵坐标标注
axis([0 0.1 -1.1 1.1]); % 横纵坐标范围设置
line([0,0.1],[0,0],'color','b','Linewidth',2);% 绘制一条从(0,0)到(0.1,0)的蓝色实线,线宽为2
%% ******************原始信号******************
subplot(212);
plot(t,mt,'r-','Linewidth',2); % 绘制原始基带信号
title('原始基带信号'); % 图标题标注
xlabel('t/时间'); % 横坐标标注
ylabel('幅度'); % 纵坐标标注
axis([0 0.1 -1.1 1.1]); % 横纵坐标范围设置
line([0,0.1],[0,0],'color','b','Linewidth',2);% 绘制一条从(0,0)到(0.1,0)的蓝色实线,线宽为2
T2F.m文件,FFT功能
function [f,sf]= T2F(t,st) % FFT
% dt = t(2)-t(1);
T=t(end); % 输入信号的时间最大值为T
df = 1/T; % dt=1/fs; 时间采样间隔,采样频率的倒数;
% N=T/dt; 采样点个数,总时长除以采样间隔
% 两式联合推导 df = 1/T
N = length(st); % 输入信号时间的长度为采样点数
f=-N/2*df : df : N/2 * df-df; % 频率分布
sf = fft(st); % 做FFT
sf = T/N * fftshift(sf); % 最后输出,将0-fs频谱搬移到-fs/2-fs/2频谱
F2T.m文件,IFFT功能
function[t,st]=F2T(f,Sf) % IFFT
df=f(2)-f(1); % 频率间隔
fmax=(f(end)-f(1)+df); % 最大频率减最低频率加上频率间隔为带宽
dt=1/fmax; % 采样间隔
N=length(f); % 采样点数
t=[0:N-1] * dt; % 时间分布
Sf=fftshift(Sf); % 将0-fs频谱搬移到-fs/2-fs/2频谱
st=fmax * ifft(Sf); % 做IFFT
st=real(st); % 取实部
lpf.m文件,低通滤波功能
function[t,st]=lpf(f,sf,B) % 频率LPF
df=f(2)-f(1); % 频率间隔
fN=length(f); % 采样点数
ym=zeros(1,fN); % 生成1行fN列的0向量
xm=floor(B/df); % 低频带宽频率除以间隔后的点数向下取整
xm_shift=[-xm:xm-1]+floor(fN/2); % 因为前面做FFT将0频率搬移到中心处,
% 因此,低通低频频率相应地搬移fN/2,才是对应的频率点
ym(xm_shift)=1; % 低通通过频率处幅度为1,其余为0,相当于理想低通
yf=ym.* sf; % FFT信号的频谱和对应低频带宽处频率值为1的行向量相乘
[t,st]=F2T(f,yf); % IFFT
注意:这四个文件要放在同一文件夹中,第一个是主文件,另外三个是函数文件
结果图中AM信号是经过信道,加了高斯白噪声的。
如果不想加噪声,把下面这行代码注释即可。
sam=awgn(sam,SNR,'measured');
优点:实现简单,具有直流量便于载波同步;
缺点:直流量占用较大能量,但不传递信息,功率利用率低。
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
文章目录认识unity打包目录结构游戏逆向流程Unity游戏攻击面可被攻击原因mono的打包建议方案锁血飞天无限金币攻击力翻倍以上统称内存挂透视自瞄压枪瞬移内购破解Unity游戏防御开发时注意数据安全接入第三方反作弊系统外挂检测思路狠人自爆实战查看目录结构用il2cppdumper例子2-森林whoishe后记认识unity打包目录结构dll一般很大,因为里面是所有的游戏功能编译成的二进制码游戏逆向流程开发人员代码被编译打包到GameAssembly.dll中使用il2ppDumper工具,并借助游戏名_Data\il2cpp_data\Metadata\global-metadata.dat
功能需求:主机使用一个串口,与两个从机进行双向通信,主机向从机发送数据,从机能够返回数据,由于结构限制,主机与从机之间只有3根线(电源、地、数据线),并且从机上没有设物理的电源开关,需要通过与主机连接的数据线来控制开机,总结如下:1、数据线只有1根2、能够双向通信3、主机能够控制从机开机4、主机可以单独向1个从机发数据,也可以同时向两个从机发送数据根据需求,设计出如下电路:工作原理分析:VCC_24V_IN、GND、LINE_L(LINE_R)三根线接线连接到从机,电源开启电路是从机内部的电源控制。开机的逻辑:*主机先上电,LINE_L因为主机的R1上拉而有高电平,使Q6导通,Q5的G极电压被
前言 Slowloris攻击是我在李华峰老师的书——《MetasploitWeb 渗透测试实战》里面看的,感觉既简单又使用,现在这种攻击是很容易被防护的啦。不过我也不敢真刀实战的去试,只是拿个靶机玩玩罢了。 废话还是写在结语里面吧。(划掉)结语可以不看(划掉)Slowloris攻击的原理 Slowloris是一种资源消耗类DoS攻击,它利用部分HTTP请求进行操作。也叫做慢速攻击,这里的慢速并不是说发动攻击慢,而是访问一条链接的速度慢。Slowloris攻击的功能是打开与目标Web服务器的连接,然后尽可能长时间的保持这些连接打开。如果由多台电脑同时发起Slo
我有一个RaspberryPiTFT7"触摸屏显示器,我想创建一个简单的应用程序来显示和输出系统数据(即CPU使用率、温度等)。我注意到目前常见的实现方法是使用pygame库输出到显示器连接到的帧缓冲区/dev/fb1。我想执行相同的操作,但使用Ruby,因为我更熟悉这门语言。有人可以为我指明正确的方向,让我知道如何开始吗?我查看了rubygame和gosu库,它们似乎能够做我想做的事情,即绘制屏幕,但我找不到任何关于如何将输出定向到的信息帧缓冲区本身。 最佳答案 rubycorelib有一个IO您应该能够使用该类将输出定向
慢跑者与狗问题描述一个慢跑者在平面上沿椭圆以恒定的速率𝒗=𝟏跑步,设椭圆方程为:𝒙=𝟏𝟎+𝟐𝟎𝒄𝒐𝒔(𝒕),𝒚=𝟐𝟎+𝟓𝒔𝒊𝒏(𝒕)。突然有一只狗攻击他,这只狗从原点出发,以恒定速率𝒘跑向慢跑者,狗的运动方向始终指向慢跑者。分别求出𝒘=𝟐𝟎,𝒘=𝟓时狗的运动轨迹。模型建立设时刻t慢跑者的坐标为(𝑿(𝒕),𝒀(𝒕)),狗的坐标为(𝒙(𝒕),𝒚(𝒕))。则𝑿=𝟏𝟎+𝟐𝟎𝒄𝒐𝒔(𝒕),𝒀=𝟐𝟎+𝟏𝟓𝒔𝒊𝒏(𝒕),狗从(0,0)出发,建立狗的运动轨迹的参数方程:由于狗始终对准人,因而狗的速度方向平行于狗与人位置的差向量:消去𝝀,得由题意𝑿=𝟏𝟎+𝟐𝟎𝒄𝒐𝒔𝒕,𝒀=𝟐𝟎+1𝟓𝒔𝒊𝒏(𝒕),狗从(0,0)