我是自己创建了一个工作空间
model_gazebo,创建方法:参考;
如果按照上一篇文章继续操作也可以,记得把mbot_gazebo换成mbot_description
cd ~/catkin_ws/src/model_gazebo/urdf/xacro
mkdir gazebo
cd gazebo
sudo gedit mbot_base_gazebo.xacro
内容如下:声明xml文件
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!--存放 下面 相关定义内容-->
</robot>
link添加惯性参数和碰撞属性与gazebo标签
各link的质量(mass)属性声明及其他常量声明
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_mass" value="20" />
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_mass" value="2" />
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<xacro:property name="caster_mass" value="0.5" />
<xacro:property name="caster_radius" value="0.015"/> <!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
颜色属性声明
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
宏定义 球体惯性矩阵计算
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
宏定义 圆柱体惯性矩阵计算
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
定义驱动轮的宏定义
与参考链接的主要区别在于
link增加惯性属性和碰撞属性
link添加gazebo标签
joint添加传动装置
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint" type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
<!-- collision -->
<!-- the same with visual -->
<!--增加惯性属性和碰撞属性-->
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<!-- inertial -->
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<!--添加gazebo标签为各link配颜色 ,gazebo与rivz颜色设置不兼容-->
<!-- Add gazebo tag to link -->
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
<!--joint添加传动装置,用得 transmission 标签,小车轮子用速度控制接口-->
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
定义前后轮的宏定义
与参考链接的主要区别在于
link增加惯性属性和碰撞属性
link添加gazebo标签
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
<!-- 碰撞属性 -->
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
</collision>
<!-- 惯性属性 -->
<sphere_inertial_matrix m="${caster_mass}" r="${caster_radius}" />
</link>
<!--添加gazebo标签,为各link配颜色-->
<gazebo reference="${prefix}_caster_link">
<material>Gazebo/Black</material>
</gazebo>
</xacro:macro>
定义主体base并添加内容
<xacro:macro name="mbot_base_gazebo">
<link name="base_footprint">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<!-- 给 base_footprint 添加标签 -->
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 ${base_length/2 + caster_radius*2}" rpy="0 0 0" />
<parent link="base_footprint"/>
<child link="base_link" />
</joint>
<!--base_link添加碰撞属性和惯性属性-->
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
<collision>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<!--base_link添加gazebo标签-->
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<wheel prefix="left" reflect="-1"/> <!-- 调用驱动轮子宏定义 -->
<wheel prefix="right" reflect="1"/> <!-- 调用驱动轮子宏定义 -->
<caster prefix="front" reflect="-1"/> <!--调用支撑轮子宏定义-->
<caster prefix="back" reflect="1"/> <!-- 调用支撑轮子宏定义 -->
</xacro:macro>
添加gazebo控制插件(类似驱动板)
继续在mbot_base_gazebo.xacro文件中编写
小车需要差速控制器,gazebo里差速控制器的插件是现成的libgazebo_ros_diff_drive.so文件
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so"> <!-- gazebo提供得差速控制器插件 -->
<!-- 控制器所需参数 -->
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace><!-- 机器人命名空间 订阅和发布得话题 前面 会加上命名空间 /说明没有添加-->
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint> <!-- 控制得joint在哪里,必须和上面得joint名称一致 -->
<rightJoint>right_wheel_joint</rightJoint><!-- 控制得joint在哪里,必须和上面得joint名称一致 -->
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation><!-- 两个轮子得间距 -->
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic> <!-- 订阅得话题:速度控制指令 -->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic> <!-- 发布里程计信息 -->
<robotBaseFrame>base_footprint</robotBaseFrame><!-- 设置controler所控制的机器人的坐标系是哪个坐标系 -->
</plugin>
</gazebo>
在同级目录下创建sudo gedit mbot_gazebo.xacro
mbot_gazebo.xacro文件内容
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find model_gazebo)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" /> <!-- 包含文件 -->
<mbot_base_gazebo/> <!-- 调用宏定义 -->
</robot>
cd ~/catkin_ws/src/mbot_description/launch/xacro
mkdir gazebo
cd gazebo
sudo gedit mbot_base_gazebo.launch
mbot_base_gazebo.launch文件内容
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find model_gazebo)/urdf/xacro/gazebo/mbot_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
roslaunch model_gazebo mbot_base_gazebo.launch
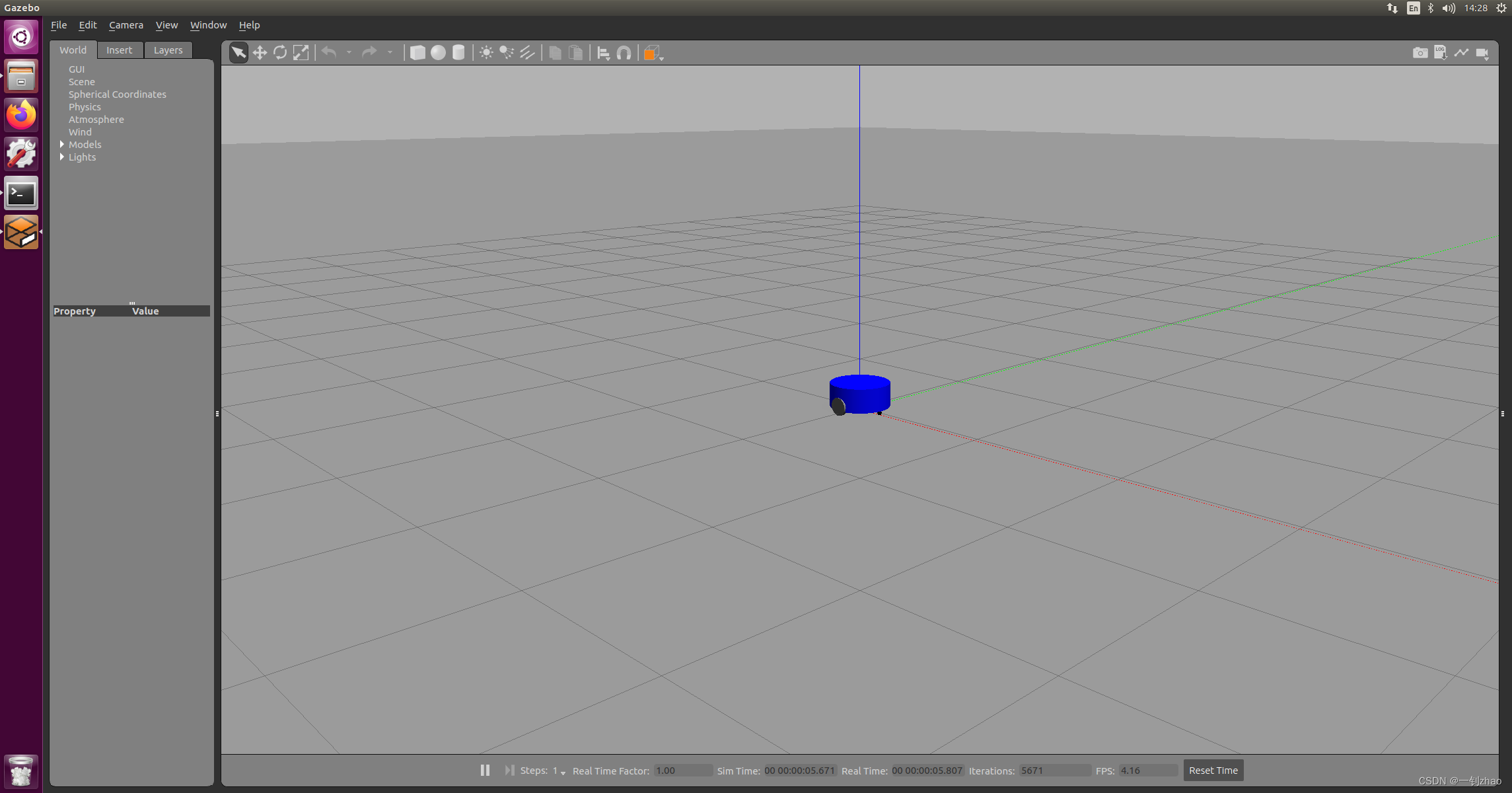
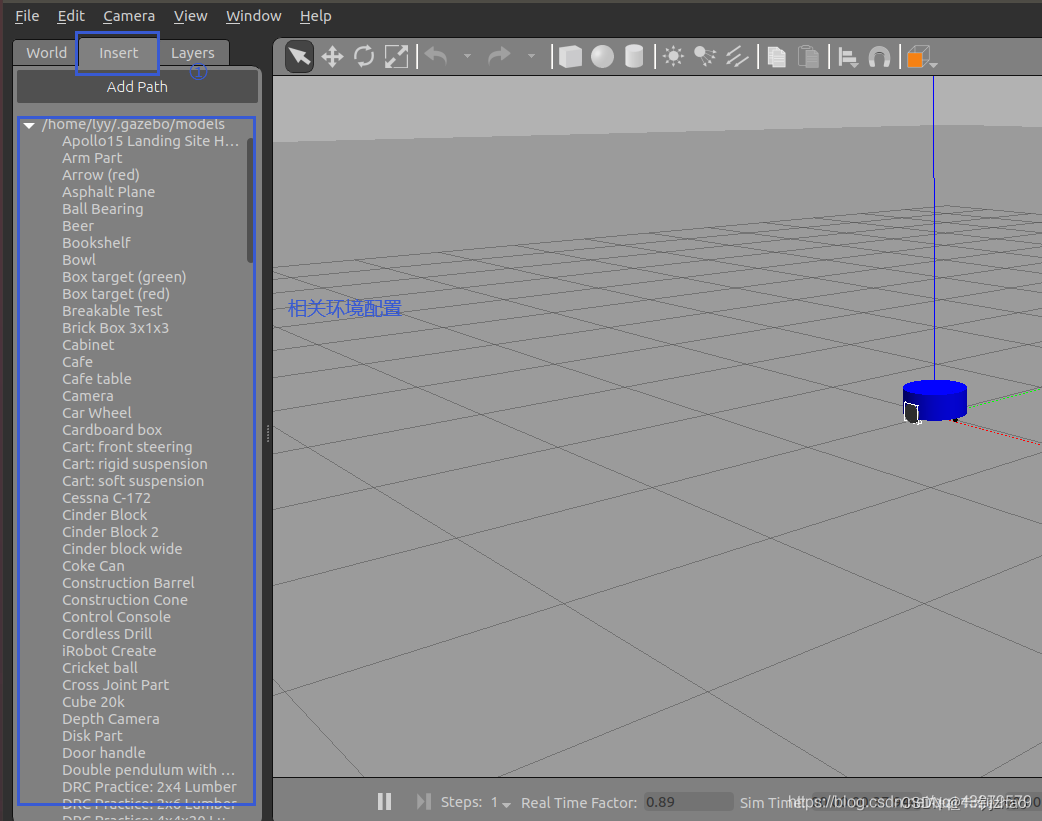
其实就是在上面打开的GAZEBO中进行添加自己想要的仿真工具
模型放置到~/.gazebo/models 文件夹下——------在gazebo的左侧列表点击“insert”(可以看到里面有很多的模型,我们只需要从列表中拖出我们需要的模型放置到仿真环境中就可以)
如果
insert列表为空,或者打开GAZEBRO里面不显示建造的模型,参考最下面错误集合:错误4
最终添加的环境内容
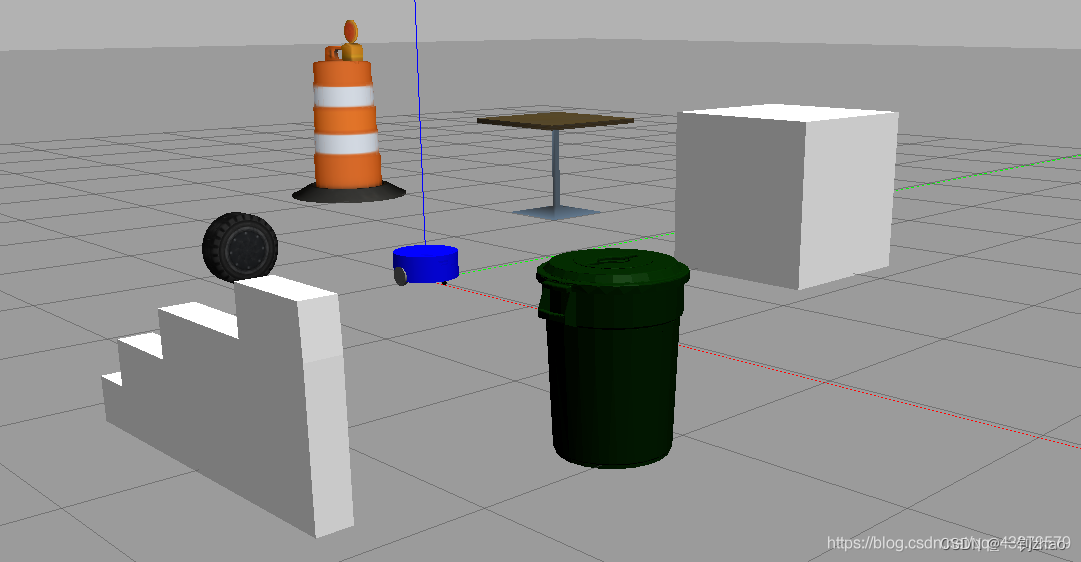
②保存仿真环境
File——Save World As——放置在功能包~/catkin_ws/src/mbot_description/worlds下面(路径自己选择,主要是在 ~/catkin_ws/src/)
最后退出即可。
1.打开空白的gazebo
roslaunch gazebo_ros empty_world.launch
2.打开Building Editor

3.保存建立的虚拟环境

4.关闭Building Editor

环境效果

5.添加一些model

添加完成的效果

6.保存最终环境


虚拟环境创建完成。
了解就好,下面会具体应用
只需要我们在launch文件中:
设置launch文件的参数处加如.world文件的路径即可这样就可以选择相要使用的仿真环境
<!-- 设置launch文件的参数 world_name的value值应该指向上一个创建好的world文件-->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playhouse.world"/><!-- 要加入的部分 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
需要在完成上面内容后,才可以继续
cd ~/catkin_ws/src/model_gazebo/urdf/xacro
mkdir sensors
cd sensors
sudo gedit camera_gazebo.xacro
内容如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link"> <!-- 这个sensor代表的link -->
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate><!-- 摄像头发布频率 -->
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov><!-- 摄像头可视范围 -->
<image>
<width>1280</width><!-- 摄像头分辨率 -->
<height>720</height><!-- 摄像头分辨率 -->
<format>R8G8B8</format><!-- 摄像头数据格式 -->
</image>
<clip>
<near>0.02</near><!-- 最近距离 -->
<far>300</far><!-- 最远距离 -->
</clip>
<noise>
<type>gaussian</type><!-- 摄像头高斯噪声 -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"><!-- 加载插件,实现摄像头功能 -->
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>/camera</cameraName><!-- 命名空间 -->
<imageTopicName>image_raw</imageTopicName><!-- 发布图片信息话题名称 -->
<cameraInfoTopicName>camera_info</cameraInfoTopicName><!-- 发布摄像头信息话题名称 -->
<frameName>camera_link</frameName><!-- 数据的坐标系统 -->
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
记得删除中文注释!
在urdf/xacro/gazebo/目录下创建:sudo gedit mbot_with_camera_gazebo.xacro
文件内容
注:两个需要改的地方:就是第四第五行文件要核对好自己的路径
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!--需要改动的地方 ! 这两个路径需要能找到文件;一个是机器人的配置;一个是新增的摄像信息-->
<xacro:include filename="$(find model_gazebo)/urdf/xacro/gazebo/mbot_base_gazebo.xacro" /><!-- include机器人底盘mbot_base_gazebo.xacro -->
<xacro:include filename="$(find model_gazebo)/urdf/xacro/sensors/camera_gazebo.xacro" /><!-- include机器人传感器摄像头camera_gazebo.xacro -->
<!-- 声明参数 -->
<xacro:property name="camera_offset_x" value="0.17" />
<xacro:property name="camera_offset_y" value="0" />
<xacro:property name="camera_offset_z" value="0.10" />
<!-- Camera -->
<joint name="camera_joint" type="fixed"><!-- 摄像头joint连接方式 -->
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<xacro:usb_camera prefix="camera"/><!-- 调用摄像头宏 -->
<mbot_base_gazebo/><!-- 调用机器人底盘宏 -->
</robot>
带摄像头的机器人launch文件
cd ~/catkin_ws/src/mbot_description/launch/xacro/gazebo
sudo gedit view_mbot_with_camera_gazebo.launch
view_mbot_with_camera_gazebo.launch文件内容
注:两个参数world_name和robot_description的路径要核对好
<launch>
<!--world_name的value值应该指向上一个创建好的world文件-->
<arg name="world_name" value="$(find model_gazebo)/worlds/playhouse.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!--需要找到该文件(创建机器人配置)的路径-->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find model_gazebo)/urdf/xacro/sensors/mbot_with_camera_gazebo.xacro'" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
roslaunch mbot_description view_mbot_with_camera_gazebo1.launch

rqt_image_view
如果提示bash: rqt: 未找到命令 rqt_image_view rqt_graph等等,参考错误5
选择**/camera/image_raw**

roslaunch mbot_teleop mbot_teleop.launch
键盘主要有u,i,o,j等。
通过按按键j,u,i,o控制摄像头视角

摄像头仿真就完成了。
启动rviz `rosrun rviz rviz
添加 add
1.选择机器人模型 RobotModel ,画面出现机器人
2.摄像头信息 image,选择image topic为/camera/image_raw 出现画面信息
通过键盘控制机器人,查看摄像头所得到的效果

如果下面的错误没有你出现的,可以参考这篇 问题解决-----ROS中Gazebo学习的问题解决合集(初次运行黑屏、运行launch文件后闪退、黑屏;gazebo联合rviz出现process has died等的解决办法)
大部分问题都可以参考上面的链接总结,感谢大佬!

报错原因分析:
1.不接入网络情况下会输出Unable to find uri[model://my1stmodel]
2.接入网络后,如果找不到该模型,会联网在Gazebo远程模型数据库中寻找,由于自己创建的模型名称,在Gazebo模型数据库中是不存在的,所以会一直停在命令行waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, watting...
gzserver: /build/ogre-1.9-mqY1wq/ogre-1.9-1.9.0+dfsg1/OgreMain/src/OgreRenderSystem.cpp:546: virtual void Ogre::RenderSystem::setDepthBufferFor(Ogre::RenderTarget*): Assertion bAttached && “A new DepthBuffer for a RenderTarget was created, but after creation” “it says it’s incompatible with that RT”’ failed.
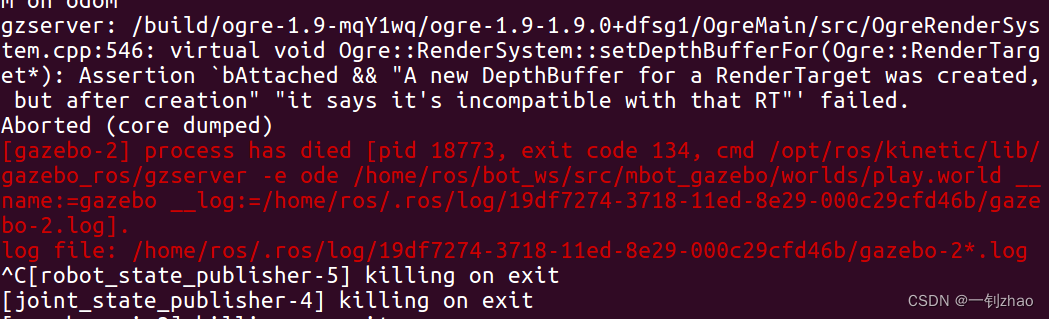
错误原因:
原因是gazebo的版本过低,与Rviz不兼容。ubuntu16.04匹配的ros版本是kinetic,kinetic安装过程中会自动下载低版本的gazebo,然后RViz又是新版本的。
解决办法:
(1)通过下面指令可以看到gazebo版本是7.0.0
xx@ubuntu:~$ gazebo --version
Gazebo multi-robot simulator, version 7.0.0
主要是升级gazebo版本,具体步骤如下:
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install gazebo8 或gazebo9
xx@ubuntu:~$ gazebo --version
Gazebo multi-robot simulator, version 7.16.1
如果还是不行,可能是显卡驱动比较陈旧,需要更新,更新英伟达的驱动
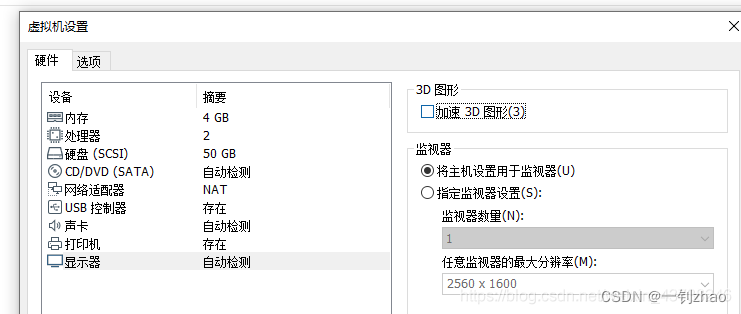
[gazebo_gui-3] process has died [pid 2238, exit code 134…(略)
方法一:gazebo启用3D加速选项方面存在一些问题,可从VM设置中禁用设置3D加速选项。禁用该选项后,仿真环境运行会比较缓慢,但可以正常工作。如图所示:
方法二:更改SVGA_VGPU10变量:
1先在终端执行export SVGA_VGPU10=0
2然后再执行roslaunch语句,比如我的是roslaunch ur_gazebo ur3.launch
Error [parser.cc:581] Unable to find uri[model://sun] Error [parser.cc:581] Unable to find uri[model://ground_plane]

参考https://aichen.blog.csdn.net/article/details/124391936
解决: 第一次下载安装gazebo的时候没有将模型文件models下载下来,所以缺少了sun和ground plane等模型。我们按照他说的链接,或者到github中下载下来放到.gazebo文件夹中即可。所需要的models文件我已经放到了百度云盘中,可以直接下载。
注意,要在.gazebo中建立models文件夹,把下载好的众多包放到里面,不要建立model,我第一次少写了一个s,结果加载不到。
如果在
/home/use_name下找不到`.hazebo’文件,原因是它被隐藏了,在当前页面状态中,按下ctrl+h显示隐藏文件,如
bash: rqt: 未找到命令 rqt_image_view rqt_graph等等
解决办法:
可能是rqt被不小心卸载了,重装就好
sudo apt-get install ros-kinetic-rqt
sudo apt-get install ros-kinetic-rqt-graph
sudo apt-get install ros-kinetic-rqt-common-plugins
教程参考:
ROS——ArbotiX+Rviz仿真
✳✳ROS——Gazebo物理仿真环境搭建
ros + gazebo未报错却加载不出来机器人模型 解决办(这里面的代码不添加注释可以直接复制)
[ROS——Gazebo物理仿真安装
解决的问题参考链接
ros + gazebo未报错却加载不出来机器人模型 解决办
Assertion `bAttached && “A new DepthBuffer for a RenderTarget was created, but after creation“ “it s
解决 gazebo_gui-3 process has died pid 2238, exit code 134
https://blog.csdn.net/Will_Ye/article/details/116428880
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
Linux操作系统——网络配置与SSH远程安装完VMware与系统后,需要进行网络配置。第一个目标为进行SSH连接,可以从本机到VMware进行文件传送,首先需要进行网络配置。1.下载远程软件首先需要先下载安装一款远程软件:FinalShell或者xhell7FinalShellxhell7FinalShell下载:Windows下载http://www.hostbuf.com/downloads/finalshell_install.exemacOS下载http://www.hostbuf.com/downloads/finalshell_install.pkg2.配置CentOS网络安装好
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
Ruby语言是否可以用于创建全新的移动操作系统或桌面操作系统,即是否可以用于系统编程? 最佳答案 嗯,现在有一些操作系统使用比C更高级的语言。基本上,ruby解释器本身需要用一些低级的东西来编写,并且需要一些引导加载代码将功能齐全的ruby解释器作为独立内核加载到内存中。一旦ruby解释器被引导并以内核模式(或innerrings之一)运行,就没有什么可以阻止您在其上构建整个操作系统。不幸的是,它可能会很慢。每个操作系统功能的垃圾收集可能会相当引人注目。ruby解释器将负责任务调度和网络堆栈等基本事情,使用垃圾收集框架会大大
正如标题,我有一个处理大量数据的ruby程序。该程序占用了所有内存,其中调用了系统命令hostname,并且发生错误无法分配内存-主机名我试过GC.start但它不起作用。那么如何强制ruby释放未使用的内存呢?OK,这是别人的测试代码,最后报错是big_var被回收了。但是内存仍然没有释放。require"weakref"defreportputs"#{param}:\t\tMemory"+`psax-opid,rss|grep-E"^[[:space:]]*#{$$}"`.strip.split.map(&:to_i)[1].to_s+'KB'endbig_var=""#big
我想知道与使用native操作系统库执行压缩相比,使用rubyzip压缩数据时的性能差异是什么。我正在从URL获取要压缩的数据,然后使用ZipOutputStream创建zip文件。对于native操作系统实用程序,我正在考虑使用zip工具。很高兴听到这两种方法的优缺点。 最佳答案 事实证明,无论是运算时间还是CPU使用率,都没有太大差异。但是在内存使用方面存在显着差异。与使用ziputil相比,使用rubyzip的过程最终会使用更多的内存。在我们的用例中,内存使用是一个重要问题,因此我们最终使用了zip实用程序。