本设计仅供学习参考
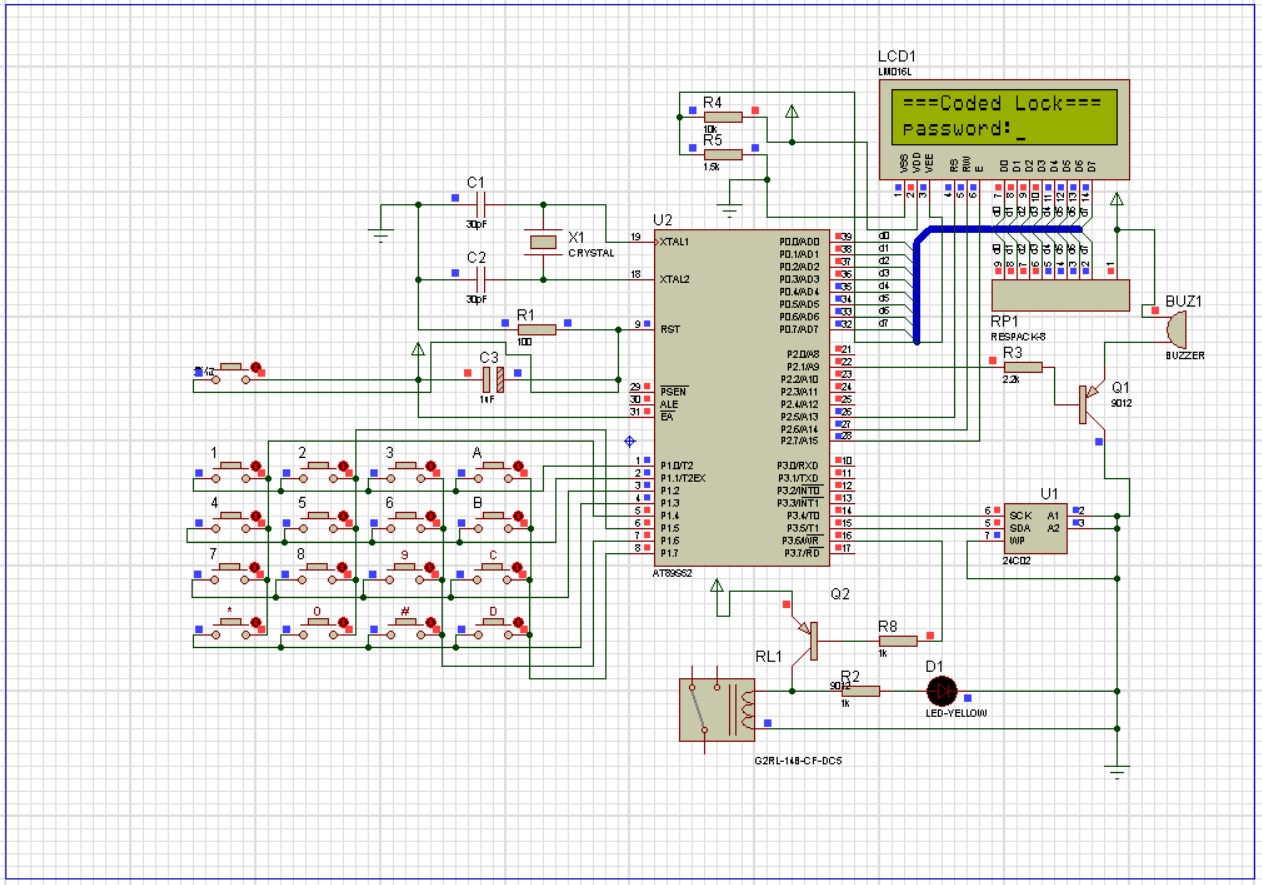
基于51单片机LCD1602矩阵键盘密码锁proteus仿真设计(程序+仿真)
原理图:Altium Designer
仿真图proteus 7.8
程序编译器:keil 4/keil 5
编程语言:C语言
编号C0035
【腾讯文档】C0035 网盘链接
1.按键设置6位密码,输入密码若密码正确,则锁打开。显示open!
2.密码可以自己修改(6位密码),必须是锁打开时才能改密。为防止误操作,修改密码得输入两次。
3.若密码输入错误次数超过3次,蜂鸣器报警并且锁定键盘。
4.24C02有复位、掉电保存密码功能。
5.液晶屏亮度会随光线自动调整。
排列方式:1 2 3 A
4 5 6 B
7 8 9 C
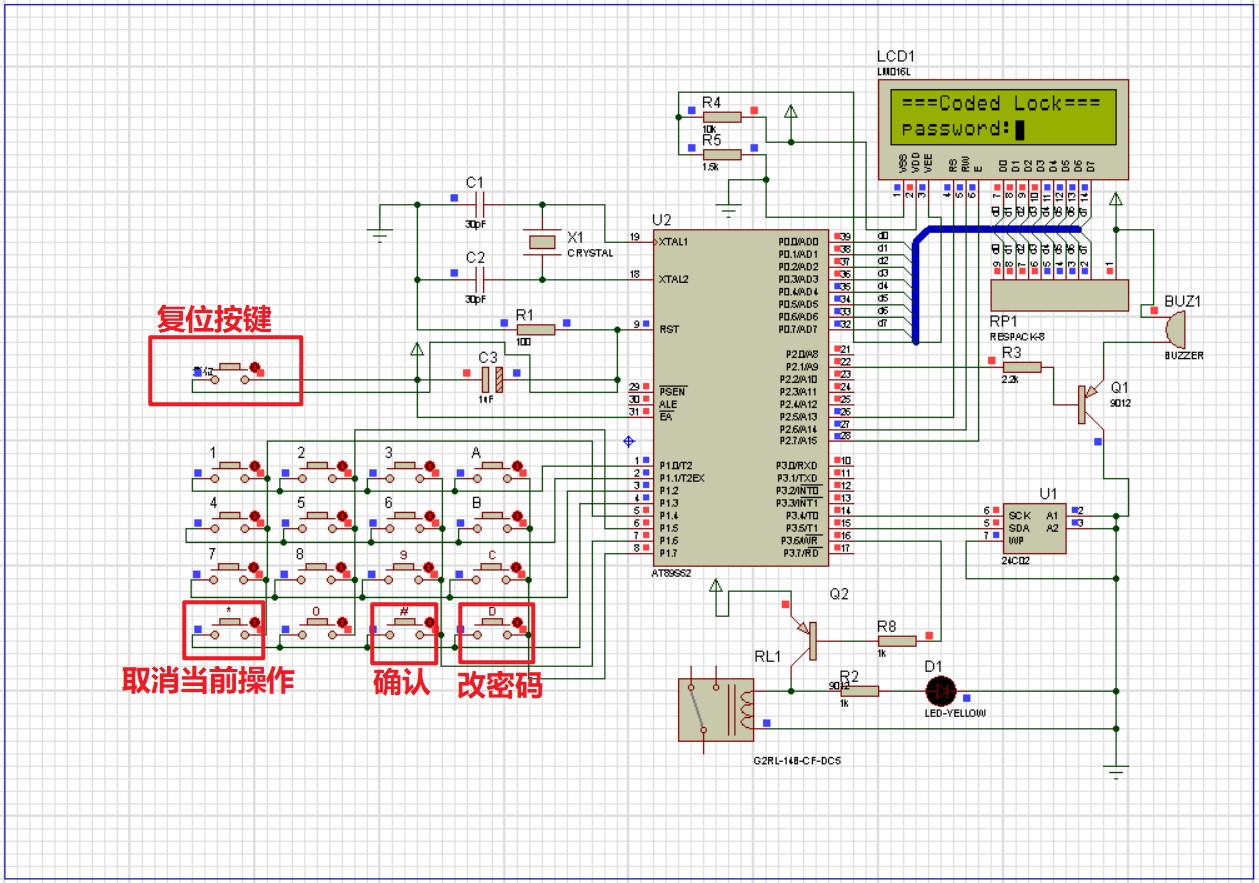
1、首次使用时输入:131420,对密码进行初始化,当显示:initpassword,证明密码初始化完成,此时的密码为:000000。然后可以改密了。(如密码忘记就再输入131420初始化,然后密码就是000000了,不要告诉别人哦~~~)
2、按下 * 键或复位键,可以关锁并退出。
3、当输入密码错误后,报警并锁定键盘3秒钟。
4、修改密码:在开锁状态下,再次输入正确的密码并按下 # 键,此时听到两声提示,输入新的六位密码并按 D 键,再重复输入一次新密码并按 D ,会听到两声提示音,表示重设密码成功,内部保存新密码并存储。如两次输入的新密码不一样,则重设密码失败。
LCD1602
//==================================================================================================
//=======================================LCD1602====================================================
//==================================================================================================
#define yi 0x80 //LCD第一行的初始位置,因为LCD1602字符地址首位D7恒定为1(100000000=80)
#define er 0x80+0x40 //LCD第二行初始位置(因为第二行第一个字符位置地址是0x40)
//----------------延时函数,后面经常调用----------------------
void delay(uint xms)//延时函数,有参函数
{
uint x,y;
for(x=xms;x>0;x--)
for(y=110;y>0;y--);
}
//--------------------------写指令---------------------------
void write_1602com(uchar com)//****液晶写入指令函数****
{
lcd1602_rs=0;//数据/指令选择置为指令
lcd1602_rw=0; //读写选择置为写
P0=com;//送入数据
delay(1);
lcd1602_en=1;//拉高使能端,为制造有效的下降沿做准备
delay(1);
lcd1602_en=0;//en由高变低,产生下降沿,液晶执行命令
}
//-------------------------写数据-----------------------------
void write_1602dat(uchar dat)//***液晶写入数据函数****
{
lcd1602_rs=1;//数据/指令选择置为数据
lcd1602_rw=0; //读写选择置为写
P0=dat;//送入数据
delay(1);
lcd1602_en=1; //en置高电平,为制造下降沿做准备
delay(1);
lcd1602_en=0; //en由高变低,产生下降沿,液晶执行命令
}
//-------------------------初始化-------------------------
void lcd_init(void)
{
write_1602com(0x38);//设置液晶工作模式,意思:16*2行显示,5*7点阵,8位数据
write_1602com(0x0c);//开显示不显示光标
write_1602com(0x06);//整屏不移动,光标自动右移
write_1602com(0x01);//清显示
}
按键和声音提示
//=====================按键检测并返回按键值===============================
unsigned char keynum(void)
{
unsigned char row,col,i;
P1=0xf0;
if((P1&0xf0)!=0xf0)
{
Delay5Ms();
Delay5Ms();
if((P1&0xf0)!=0xf0)
{
row=P1^0xf0; //确定行线
i=0;
P1=a[i]; //精确定位
while(i<4)
{
if((P1&0xf0)!=0xf0)
{
col=~(P1&0xff); //确定列线
break; //已定位后提前退出
}
else
{
i++;
P1=a[i];
}
}
}
else
{
return 0;
}
while((P1&0xf0)!=0xf0);
return (row|col); //行线与列线组合后返回
}
else return 0; //无键按下时返回0
}
//=======================一声提示音,表示有效输入========================
void OneAlam(void)
{
ALAM=0;
Delay5Ms();
ALAM=1;
}
//========================二声提示音,表示操作成功========================
void TwoAlam(void)
{
ALAM=0;
Delay5Ms();
ALAM=1;
Delay5Ms();
ALAM=0;
Delay5Ms();
ALAM=1;
}
//========================三声提示音,表示错误========================
void ThreeAlam(void)
{
ALAM=0;
Delay5Ms();
ALAM=1;
Delay5Ms();
ALAM=0;
Delay5Ms();
ALAM=1;
Delay5Ms();
ALAM=0;
Delay5Ms();
ALAM=1;
}
重置密码
//========================重置密码==================================================
//==================================================================================
void ResetPassword(void)
{
unsigned char i;
unsigned char j;
if(pass==0)
{
pass=0;
DisplayChar(); //显示错误
ThreeAlam(); //没开锁时按下重置密码报警3声
}
else //开锁状态下才能进行密码重置程序
{
if(ReInputEn==1) //开锁状态下,ReInputEn置1,重置密码允许
{
if(N==6) //输入6位密码
{
ReInputCont++; //密码次数计数
if(ReInputCont==2) //输入两次密码
{
for(i=0;i<6;)
{
if(TempPassword[i]==InputData[i]) //将两次输入的新密码作对比
i++;
else //如果两次的密码不同
{
//DisplayListChar(0,1,Error);
write_1602com(er);
for(j=0;j<16;j++)
{
write_1602dat(Error[j]); //显示错误Error
}
ThreeAlam(); //错误提示
pass=0; //关锁
ReInputEn=0; //关闭重置功能,
ReInputCont=0;
DisplayChar();
break;
}
}
if(i==6)
{
//DisplayListChar(0,1,ResetOK);
write_1602com(er);
for(j=0;j<16;j++)
{
write_1602dat(ResetOK[j]); //密码修改成功,显示
}
TwoAlam(); //操作成功提示
WrToROM(TempPassword,0,6); //将新密码写入24C02存储
ReInputEn=0;
}
ReInputCont=0;
CorrectCont=0;
}
else //输入一次密码时
{
OneAlam();
//DisplayListChar(0, 1, again); //显示再次输入一次
write_1602com(er);
for(j=0;j<16;j++)
{
write_1602dat(again[j]); //显示再输入一次
}
for(i=0;i<6;i++)
{
TempPassword[i]=InputData[i]; //将第一次输入的数据暂存起来
}
}
N=0; //输入数据位数计数器清零
}
}
}
}
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
我正在寻找用于Rails的优质管理插件。似乎大多数现有的插件/gem(例如“restful_authentication”、“acts_as_authenticated”)都围绕着self注册等展开。但是,我正在寻找一种功能齐全的基于管理/管理角色的解决方案——但不是简单地附加到另一个非基于角色的解决方案。如果我找不到,我想我会自己动手......只是不想重新发明轮子。 最佳答案 RyanBates最近做了两个关于授权的railscast(注意身份验证和授权之间的区别;身份验证检查用户是否如她所说的那样,授权检查用户是否有权访问资源
我正在根据Rakefile中的现有测试文件动态生成测试任务。假设您有各种以模式命名的单元测试文件test_.rb.所以我正在做的是创建一个以“测试”命名空间内的文件名命名的任务。使用下面的代码,我可以用raketest:调用所有测试require'rake/testtask'task:default=>'test:all'namespace:testdodesc"Runalltests"Rake::TestTask.new(:all)do|t|t.test_files=FileList['test_*.rb']endFileList['test_*.rb'].eachdo|task|n
我想要像“嘿那里”这样的东西变成,例如,#316583。我希望将任意长度的字符串“归结”为十六进制颜色。我不知道从哪里开始。我在想,每个字符串的MD5散列都是不同的-但如何将该散列转换为十六进制颜色数字? 最佳答案 你可以只取几位前几位:require'digest/md5'color=Digest::MD5.hexdigest('Mytext')[0..5] 关于ruby-如何使用Ruby基于字母数字字符串生成颜色?,我们在StackOverflow上找到一个类似的问题:
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接