一、基于STM32F103C8T6最小系统板和STM32CubeMX实现LED灯循环闪烁
二、基于STM32F103C8T6和STM32CubeMX实现UART串口通信数据收发
三、实战小例程 基于STM32F103C8T6最小系统板和STM32CubeMX驱动WS2812B光立方
四、基于STM32F103C8T6最小系统板HAL库CubeMX驱动HC-SR501红外人体传感模块
五、基于STM32F103C8T6(HAL库)的HC-SR501红外人体传感及HC-SR04超声波测距
文章目录
HC-SR501红外人体感应模块资料介绍:
探究人体红外传感器HC-SR501
HC-SR04超声波测距模块资料介绍:
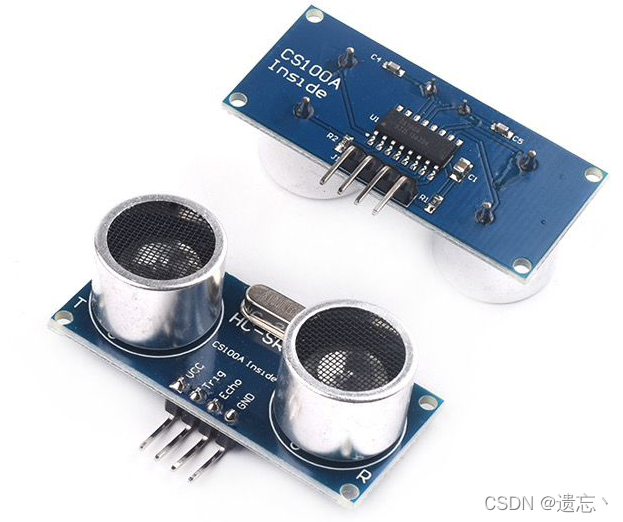
| 引脚名称 | 引脚作用 |
|---|---|
| VCC | 3-5.5V供电(实测发现可以3.3V供电,但没有5V供电测得准) |
| GND | 接地 |
| Trig | 外部触发信号输入,输入一个高于10μs的高电平即可触发模块测距 |
| Echo | 回响信号输出,测距结束时此管脚输出一个高电平,电平宽度反映超声波往返时间之和 |
工作原理:
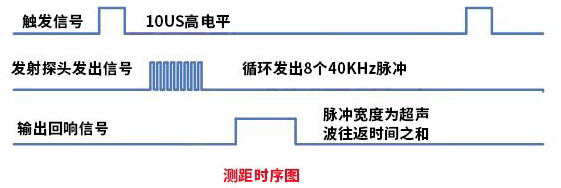
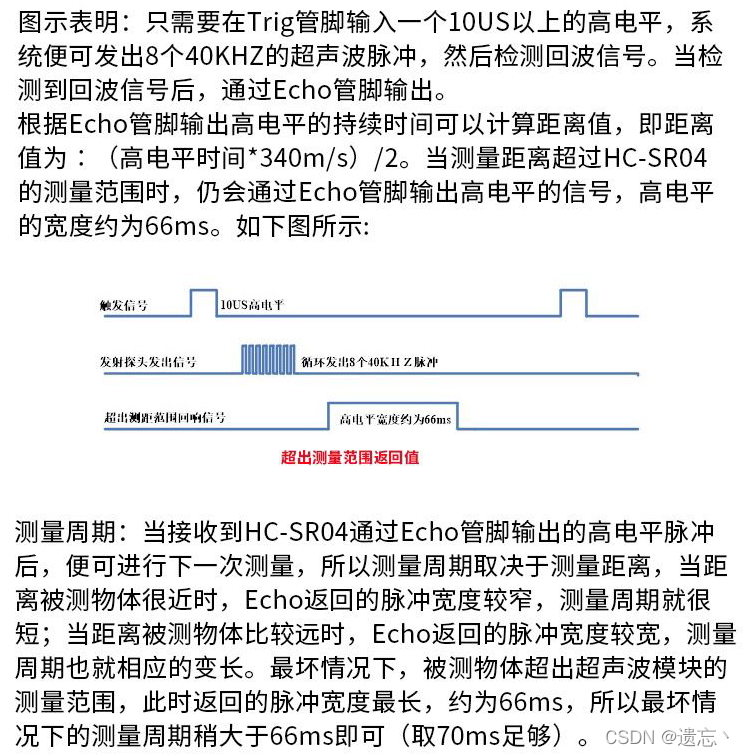
简而言之:
给Trig一个10μS以上的高电平,模块开始工作,模块内自动发送八个40khz方波,并自主检测是否有电波返回。此时需要检测Echo处的电平,当为高电平的时候记一个时间;当Echo出为低电平的时候再记一个时间,这两个时间的差就是高电平持续的时间,最后用测距公式进行计算。
1、新建工程;
2、配置时钟源,在RCC里面的HSE配置的是晶振时钟;
3、配置程序烧录引脚SYS为SWD模式;
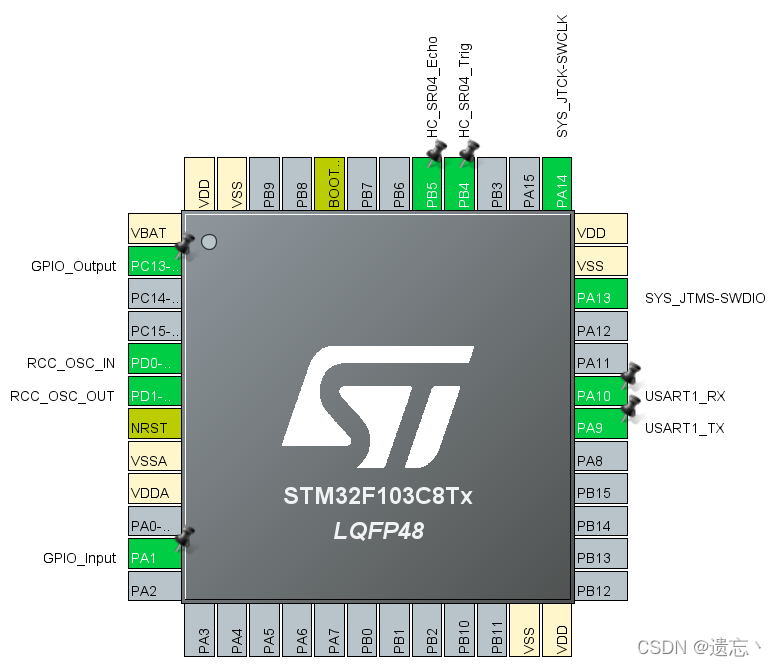
4、配置GPIO输出口,配置一个LED灯(我的板子是PC13),起到检测到人体时的指示作用;
5、配置GPIO输入口,用来读取HC-SR501模块的输出电平,我选的是PA1口;
6、配置GPIO输入口,用来检测HC-SR04超声波测距模块的回响信号输出,我选择PB5口,命名为HC_SR04_Echo_Pin;
7、配置GPIO输出口,用来触发HC-SR04超声波测距模块,我选择PB4口,命名为HC_SR04_Trig_Pin;
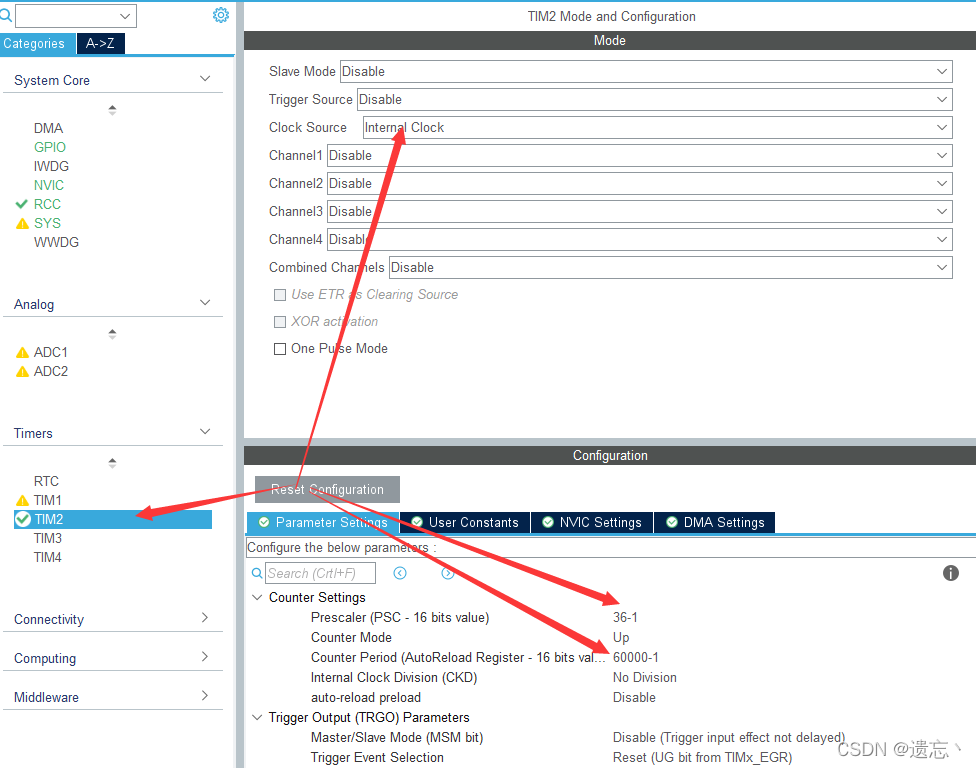
8、使能定时器,用来实现微秒延时,和测量HC-SR04模块高电平时间,我选择TIM2,并使能TIM2中断;
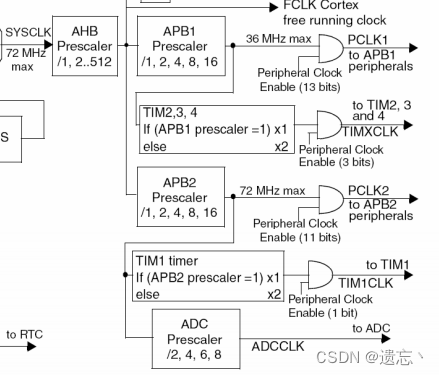
TIM2挂载在APB1,时钟来源频率为36MHz,故取预分频系数PSC=36-1,计数周期Counter设为60000-1。即此时定时器频率为36M/36=1MHz,每60ms进一次中断,60000μs对应实际测距范围大概为10m,远远超过我的需求。

9、配置串口收发引脚;
10、配置时钟树,我还是开到最高的72MHz;
11、进行项目设置,最后生成代码,CubeMX部分就大功告成了
CH340 ↔ STM32F103C8T6最小系统板:
TX ↔ RX
RX ↔ TX
DAP-LINK ↔ STM32F103C8T6最小系统板
3.3V ↔ VCC
GND ↔ GND
SWIO ↔ SWIO
SWCLK ↔ SWCLK
HC-SR501模块 ↔ STM32F103C8T6最小系统板
OUT ↔ PA1
GND ↔ GND
HC-SR501模块 ↔ DAP-LINK (这里注意模块供电范围为4.5V-20V,用3.3V无法驱动)
VCC ↔ 5V
HC-SR04模块 ↔ CH340
VCC ↔ 5V
HC-SR04模块 ↔ STM32F103C8T6最小系统板
Trig ↔ PB4
Echo ↔ PB5
GND ↔ GND
代码框架是基于上一篇HC-SR501红外人体感应模块修改而成的,想要完整代码的话可以和上篇文章一起看。
#include "main.h"
#include "HC_SR04.h"
#include "stm32f1xx_hal.h"
#include "stm32f1xx_it.h"
static float distance_result;
/*
*********************************************************
函数原型:void Delay_us(uint16_t time)
函数输入:无符号整形
函数输出:无
函数功能:利用定时器实现微秒级延时
*********************************************************
*/
void Delay_us(uint16_t time)
{
uint16_t a1=TIM2->CNT;
while(TIM2->CNT-a1<time);
}
/*
*********************************************************
函数原型:void HC_SR04_startrange(void)
函数输入:无
函数输出:无
函数功能:从trig引脚生成一个不小于10us的高电平触发测距,触发后模块自动产生8个40kHz方波,自动检测是否有信号返回
*********************************************************
*/
void HC_SR04_startrange(void)
{
HAL_GPIO_WritePin(HC_SR04_Trig_GPIO_Port,HC_SR04_Trig_Pin,GPIO_PIN_SET);
//HAL_Delay(5);
Delay_us(10);
HAL_GPIO_WritePin(HC_SR04_Trig_GPIO_Port,HC_SR04_Trig_Pin,GPIO_PIN_RESET);
}
/*
*********************************************************
函数原型:uint16_t HC_SR04_gettime(void)
函数输入:无
函数输出:无符号整型
函数功能:通过定时器获取当前时间
*********************************************************
*/
uint16_t HC_SR04_gettime(void)
{
uint32_t a;
a=TIM2->CNT;
return a;
}
/*
*********************************************************
函数原型:float HC_SR04_getdistance(void)
函数输入:无
函数输出:浮点型
函数功能:获取与目标之间的距离
*********************************************************
*/
float HC_SR04_getdistance(void)
{
uint16_t time_node1;
uint16_t time_node2;
uint16_t measure;
HC_SR04_startrange();
TIM2->CNT = 0;
//有信号返回则通过IO口Echo输出高电平,高电平持续时间即为超声波从发射到返回的时间,测试距离=( 高电平时间*声速(340m/s) )/ 2
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port,HC_SR04_Echo_Pin)==RESET);
time_node1=HC_SR04_gettime();
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port,HC_SR04_Echo_Pin)==SET);
time_node2=HC_SR04_gettime();
measure=time_node2-time_node1;
distance_result = measure * 17.0/1000;//距离=计数差值(us) / 1000000 * 340(m/s) * 100 / 2 = measure * 17/1000
return distance_result;
}
#ifndef _HC_SR04_H_
#define _HC_SR04_H_
void Delay_us(uint16_t time);
void HC_SR04_startrange(void);
float HC_SR04_getdistance(void);
uint16_t HC_SR04_gettime(void);
#endif
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);
/* USER CODE END 2 */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1) == 1)
{
//HAL_Delay(50);
HC_SR04_distance=HC_SR04_getdistance();
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);//灭灯
printf("有人,目前距离为:%.2f cm\r\n",HC_SR04_distance);
HAL_Delay(100);
}
else
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_SET);//亮灯
printf("没人\r\n");
HAL_Delay(1000);
}
// printf("hellp\r\n");
// HAL_Delay(1000);
}
/* USER CODE END 3 */
}
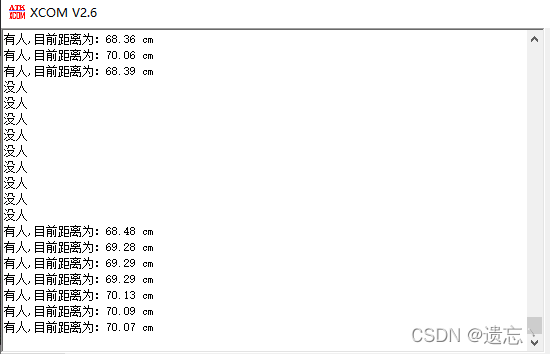
现象:
感应到人体,板载LED绿灯亮,同时串口打印测距结果。
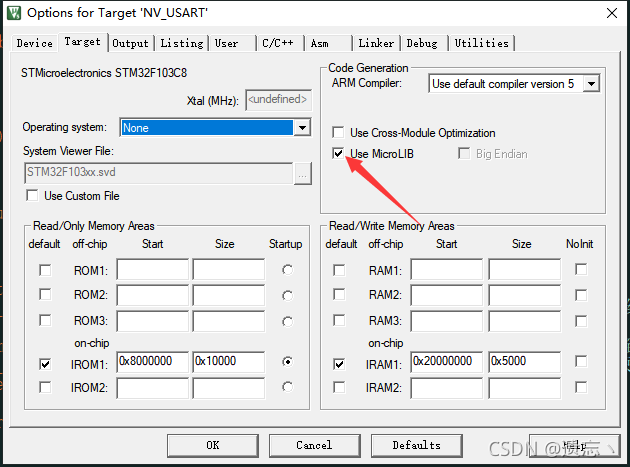
注意:
重定义printf后,必须在target里面勾选上MicroLIB,调用一下这个微型库,不然一直卡在里面。
参考博客:
stm32f1驱动HC-SR04超声波测距模块
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
本文代码使用HAL库。文章目录前言一、MCP4017的重要特性二、MCP4017计算RBW阻值三、MCP4017地址四、MCP4017读写函数五、CubeMX创建工程(利用ADC测量MCP4017电压)、对应代码:总结前言一、MCP4017的重要特性蓝桥杯板子上的是MCP4017T-104ELT,如图1。MCP4017是一个可编程电阻,通过写入的数值可以改变电阻的大小。重点在于6引脚(W),5引脚(B&#
STM32OTA应用开发——通过USB实现OTA升级目录STM32OTA应用开发——通过USB实现OTA升级前言1环境搭建2功能描述3BootLoader的制作4APP的制作5烧录下载配置6运行测试结束语前言什么是OTA?百度百科:空中下载技术(Over-the-AirTechnology;OTA),是通过移动通信的空中接口实现对移动终端设备及SIM卡数据进行远程管理的技术。经过公网多年的应用与发展,已十分成熟,网络运营商通过OTA技术实现SIM卡远程管理,还能提供移动化的新业务下载功能。实际上,现在我们所说的OTA比百度百科的定义还要更广泛,OTA的形式已经不再局限于手机和SIM卡,只要涉及
目录SPI总线SPI总线概述 SPI总线分类SPI优点及缺点SPI接口硬件原理SPI四种工作模式 74HC595应用74HC595芯片概述74HC595封装及管脚功能74HC595工作原理 编辑 74HC595串行转并行点亮LED灯 程序实现 Proteus运行结构示意图SPI总线SPI总线概述 SPI(SerialPeripheralinterface):串行外围设备接口 用途:用来在微控制器与外围设备芯片之间实现数据交换 特点:高速、全双工、同步 SPI总线分类四线制全双工SPI(同时收发)MISO 主机输入/从机输出MOSI 主机输出/从机输入SCLK 串行时钟CS或
文章目录1简介2绪论2.1课题背景与目的3系统设计详细设计描述3.2硬件部分温度测量电路其他电路部分3.3软件部分主程序子系统程序温湿度程序流程键盘显示子程序3.4实现效果3.5部分相关代码4最后1简介Hi,大家好,这里是丹成学长,今天向大家介绍一个单片机项目基于单片机的智能温控农业大棚系统大家可用于课程设计或毕业设计单片机-嵌入式毕设选题大全及项目分享:https://blog.csdn.net/m0_71572576/article/details/1254090522绪论2.1课题背景与目的近年来我国的温室控制取得了长足的进步,首先在温室群控制方面,进行了初步的探索和理论研究,其次在温室
解析数据 进入阿里云的IOTStdio,点击新建项目。 新建项目后点击新建Web应用。名称 应用名称随便填写 创建完成后我们进入应用。 在左侧组件处拖入一个指示灯和一个开关。 点击指示灯组件,点击配置数据源 选择我们的产品、数据、和属性。 我们还可以配置开和关的显示颜色。 点击按钮,配置交互动作。 选择设备和属性,设置值位置点击数据来源,选择组件值 配置完成后进入预览,点击按钮,在esp8266就会收到来自平台的json格式的数据,MCU端需要做的就是解析来自平台的数据,进而达到控制下
目录前言一、定时器部分和按键部分二、PWM调速三、电机驱动部分三、编码器接口部分(测速)四.主函数总结推荐STM32学习课程:[6-8]编码器接口测速_哔哩哔哩_bilibili[6-8]编码器接口测速是STM32入门教程-2022持续更新中的第20集视频,该合集共计30集,视频收藏或关注UP主,及时了解更多相关视频内容。https://www.bilibili.com/video/BV1th411z7sn/?p=20&spm_id_from=pageDriver&vd_source=ed36b2700bbc2bac7746c270bc391540OLED显示屏代码
文章目录1.I2C与SPI通信协议对比2.四脚OLED与六脚OLED3.I2C驱动OLED显示oled.h&oled.c:汉字取模&oledfont.h:main.c显示示例:连线方法:4.SPI驱动OLED显示1.I2C与SPI通信协议对比I2C(Inter-IntegratedCircuit)SPI(SerialPeripheralInterface)传输方式半双工全双工传输速度低速,100Kbps----4Mbps高速,30Mbps以上几线制4线制:VCC,GND,SCL,SDA6/7线制:VCC,GND,SCLK(D0),MOSI(D1/SDA),DC,CS/SS主从模式多主机总线,通
🐱作者:一只大喵咪1201🐱专栏:《STM32学习》🔥格言:你只管努力,剩下的交给时间!LCD显示📺LCD简介📺TFTLCD驱动原理📺ILI9341液晶控制器简介🃏液晶屏的信号线及8080时序📺使用STM32的FSMC模拟8080接口时序📺硬件连接📺代码实现📺字符显示🃏英文字符显示🃏英文字符串的显示📺总结📺LCD简介显示器属于计算机的I/O设备,即输入输出设备。它是一种将特定电子信息输出到屏幕上再反射到人眼的显示工具。常见的有CRT显示器、液晶显示器、LED点阵显示器及OLED显示器。本喵这里使用的是CLD显示器,也就是液晶显示器。液晶显示器,简称LCD(LiquidCrystalDispla