51单片机简易电阻测量仪仿真设计( proteus仿真+程序+报告+讲解视频)
仿真图proteus7.8及以上
程序编译器:keil 4/keil 5
编程语言:C语言
设计编号:S0037
51单片机简易电阻测量仪仿真设计
基于51单片机的简易电阻测量仪仿真设计( proteus仿真+程序+报告+讲解视频)
单片机最小系统,或者称为 最小应用系统,是指用最少的元件组成的单片机可以工作的系统。对51系列单片机来说,最小系统一般应该包括:单片机、晶振电路、复位电路。下面给出一个51单片机的最小系统电路图。
一、复位电路的用途:单片机复位电路就好比电脑的重启部分,当电脑在使用中出现死机,按下重启按钮电脑内部的程序从头开始执行。单片机也一样,当单片机系统在运行中,受到环境干扰出现程序跑飞的时候,按下复位按钮内部的程序自动从头开始执行。单片机复位电路如下图:
二、复位电路的工作原理在书本上有介绍,51单片机要复位只需要在第9引脚接个高电平持续2US就可以实现,那这个过程是如何实现的呢?在单片机系统中,系统上电启动的时候复位一次,当按键按下的时候系统再次复位,如果释放后再按下,系统还会复位。所以可以通过按键的断开和闭合在运行的系统中控制其复位。
开机的时候为什么会复位:在电路图中,电容的的大小是10uF,电阻的大小是10k。所以根据公式,可以算出电容充电到电源电压的0.7倍(单片机的电源是5V,所以充电到0.7倍即为3.5V),需要的时间是10K*10UF=0.1S。也就是说在单片机启动的0.1S内,电容两端的电压时在03.5V增加。这个时候10K电阻两端的电压为从51.5V减少(串联电路各处电压之和为总电压)。所以在0.1S内,RST引脚所接收到的电压是5V~1.5V。在5V正常工作的51单片机中小于1.5V的电压信号为低电平信号,而大于1.5V的电压信号为高电平信号。所以在开机0.1S内,单片机系统自动复位(RST引脚接收到的高电平信号时间为0.1S左右)。
按键按下的时候为什么会复位:在单片机启动0.1S后,电容C两端的电压持续充电为5V,这是时候10K电阻两端的电压接近于0V,RST处于低电平所以系统正常工作。当按键按下的时候,开关导通,这个时候电容两端形成了一个回路,电容被短路,所以在按键按下的这个过程中,电容开始释放之前充的电量。随着时间的推移,电容的电压在0.1S内,从5V释放到变为了1.5V,甚至更小。根据串联电路电压为各处之和,这个时候10K电阻两端的电压为3.5V,甚至更大,所以RST引脚又接收到高电平。单片机系统自动复位。
晶振电路:晶振是晶体振荡器的简称 在电气上它可以等效成一个电容和一个电阻并联再串联一个电容的二端网络 电工学上这个网络有两个谐振点 以频率的高低分其中较低的频率是串联谐振 较高的频率是并联谐振 由于晶体自身的特性致使这两个频率的距离相当的接近 在这个极窄的频率范围内 晶振等效为一个电感 所以只要晶振的两端并联上合适的电容它就会组成并联谐振电路 这个并联谐振电路加到一个负反馈电路中就可以构成正弦波振荡电路 由于晶振等效为电感的频率范围很窄 所以即使其他元件的参数变化很大 这个振荡器的频率也不会有很大的变化
晶振有一个重要的参数 那就是负载电容值 选择与负载电容值相等的并联电容 就可以得到晶振标称的谐振频率
一般的晶振振荡电路都是在一个反相放大器(注意是放大器不是反相器)的两端接入晶振 再有两个电容分别接到晶振的两端 每个电容的另一端再接到地 这两个电容串联的容量值就应该等于负载电容 请注意一般IC的引脚都有等效输入电容 这个不能忽略
一般的晶振的负载电容为15pF或12.5pF 如果再考虑元件引脚的等效输入电容 则两个22pF的电容构成晶振的振荡电路就是比较好的选择
如上图:晶振是给单片机提供工作信号脉冲的 这个脉冲就是单片机的工作速度 比如 12M晶振 单片机工作速度就是每秒12M 当然 单片机的工作频率是有范围的 不能太大 一般24M就不上去了 不然不稳定
晶振与单片机的脚XTAL0和脚XTAL1构成的振荡电路中会产生偕波(也就是不希望存在的其他频率的波) 这个波对电路的影响不大 但会降低电路的时钟振荡器的稳定性 为了电路的稳定性起见 ATMEL公司只是建议在晶振的两引脚处接入两个10pf-50pf的瓷片电容接地来削减偕波对电路的稳定性的影响 所以晶振所配的电容在10pf-50pf之间都可以的 没有什么计算公式
P0口的上拉电阻:
P0口作为I/O口输出的时候时 输出低电平为0 输出高电平为高组态(并非5V,相当于
悬空状态)。也就是说P0 口不能真正的输出高电平,给所接的负载提供电流,因此必须接上拉电阻(一电阻连接到VCC),由电源通过这个上拉电阻给负载提供电流。 由于P0口内部没有上拉电阻,是开漏的,不管它的驱动能力多大,相当于它是没有电源的,需要外部的电路提供,绝大多数情况下P0口是必需加上拉电阻的。
1.一般51单片机的P0口在作为地址/数据复用时不接上拉电阻。
2.作为一般的I/O口时用时,由于内部没有上拉电阻,故要接上上拉电阻!!
3.当p0口用来驱动PNP管子的时候,就不需要上拉电阻,因为此时的低电平有效; 4.当P0口用来驱动NPN管子的时候,就需要上拉电阻的,因为此时只有当P0为1时候,才能够使后级端导通。
31脚EA/Vpp接电源:
STC89C51/52或其他51系列兼容单片机特别注意:对于31脚(EA/Vpp),当接高电平时,单片机在复位后从内部ROM的0000H开始执行,当接低电平时,复位后直接从外部ROM的0000H开始执行,这一点是初学者容易忽略的。
电路元件参数RC测量电路的设计
要求:
测量仪的工作原理为:利用振荡电路,将电阻测量转变为与之成一定函数关系频率的测量,再利用单片机对不同频率进行测量和处理,用LCD显示被测量的大小。
测量电阻范围为:≤30KΩ。
测量精度〈±5%。
以下为本设计资料展示图:
开始仿真
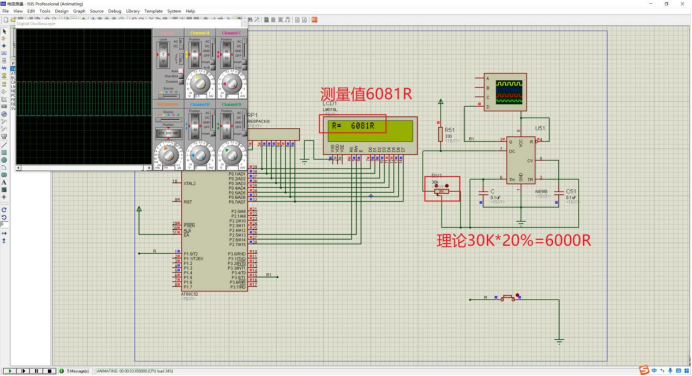
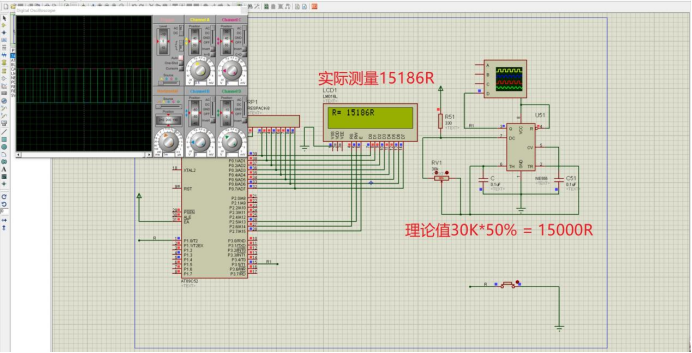
开始仿真后可以通过滑动变阻器改变测了电阻值,改动后长按测量按键显示。
测量6000R 实测数值6081R
测量15000R 实测数值15186R
#include<reg52.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit RS=P2^6;
sbit RW=P2^5;
sbit E=P2^7;
sbit R=P1^0;
sbit C=P1^1;
sbit L=P1^2;
sbit A1=P1^3;
sbit A0=P1^4;
#define LCD_data P0
uchar code table1[10]={"R= R"};
uchar code table2[10]={"C= pF"};
uchar code table3[10]={"L= mH"};
uchar code f_table[88]={13,14,15,16,17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 99, 100};
uchar code f_correct[88]={9,10, 11, 12, 12, 12, 13, 14, 15, 16, 17, 18, 18, 18, 19, 20, 21, 21, 22, 23, 24, 25, 25, 26, 26, 27, 28, 29, 29, 30, 30, 31, 32, 33, 33, 34, 35, 35, 36, 37, 38, 38, 39, 40, 41, 41, 42, 42, 43, 44, 45, 45, 46, 47, 48, 49, 49, 50, 51, 51, 52, 53, 54, 54, 55, 55, 56, 57, 57, 58, 59, 60, 60, 62, 62, 63, 64, 64, 65, 66, 66, 67, 67, 68, 69, 70, 71, 71,};
uchar a6,a5,a4,a3,a2,a1;
uchar flag;
unsigned long cnt,cnt1;
uchar f_cnt;
/********************************/
void delay_us(); //18us
void delay_ms(uint);
void lcd_init();
void lcd_write_com(uchar com);
void lcd_write_dat(uchar dat);
void lcd_init();
void lcd_display(uchar add,uchar dat);
/***********************************/
void delay_us()
{
uchar x;
for(x=0;x<5;x++);
}
void delay_ms(uint z)
{
uint x,y;
for(x=0;x<z;x++)
for(y=0;y<123;y++);
}
void lcd_write_com(uchar com)
{
E=0;
RS=0;
RW=0;
delay_us();
LCD_data=com;
E=1; //高脉冲写入数据
delay_us();
E=0;
}
void lcd_write_dat(uchar dat)
{
E=0;
RS=1;
RW=0;
delay_us();
LCD_data=dat;
E=1; //高脉冲写入数据
delay_us();
E=0;
}
void lcd_init() //lcd初始化
{
delay_ms(15);
lcd_write_com(0x38);
delay_ms(10);
lcd_write_com(0x0c);
lcd_write_com(0x06);
lcd_write_com(0x01);
delay_ms(2);
}
void timer_init(void) //定时器初始化
{
TMOD=0X51;
PT0=1; /*中断优先*/
TH0=0x3c;
TL0=0xb0;
TH1=0;
TL1=0;
ET0=1;
ET1=1;
TR0=1;
TR1=1;
EA=1;
}
void lcd_display(uchar add,uchar dat) //lcd显示(地址,数据)
{
lcd_write_com(add);
lcd_write_dat(dat);
delay_us();
}
void real_display(void)
{
if(!R)
{
// while(!R);
A1=A0=0;
lcd_display(0x80,table1[0]);
lcd_display(0x80+1,table1[1]);
lcd_display(0x80+8,table1[8]);
lcd_display(0x80+9,table1[9]);
}
else if(!C)
{
A0=0;A1=1;
lcd_display(0x80,table2[0]);
lcd_display(0x80+1,table2[1]);
lcd_display(0x80+8,table2[8]);
lcd_display(0x80+9,table2[9]);
}
else if(!L)
{
A0=1;A1=0;
lcd_display(0x80,table3[0]);
lcd_display(0x80+1,table3[1]);
lcd_display(0x80+8,table3[8]);
lcd_display(0x80+9,table3[9]);
}
if(a6)
lcd_display(0x80+2,0x30+a6);
else
lcd_display(0x80+2,' ');
if(a6||a5)
lcd_display(0x80+3,0x30+a5);
else
lcd_display(0x80+3,' ');
if(a6||a5||a4)
lcd_display(0x80+4,0x30+a4);
else
lcd_display(0x80+4,' ');
if(a6||a5||a4||a3)
lcd_display(0x80+5,0x30+a3);
else
lcd_display(0x80+5,' ');
if(a6||a5||a4||a3||a2)
lcd_display(0x80+6,0x30+a2);
else
lcd_display(0x80+6,' ');
lcd_display(0x80+7,0x30+a1);
}
void correct(void) //误差修正函数
{
uchar i,k;
unsigned long wucha;
if(cnt<100000) //100KHz以内的修正
{
if(cnt>980&&cnt<2100) cnt-=1;
if(cnt>=2100&&cnt<3900) cnt-=2;
if(cnt>=3900&&cnt<4800) cnt-=3;
if(cnt>=4800&&cnt<5700) cnt-=4;
if(cnt>=5700&&cnt<8000) cnt-=5;
if(cnt>=8000&&cnt<9100) cnt-=6;
if(cnt>=9100&&cnt<10900) cnt-=7;
if(cnt>=10900&&cnt<11900) cnt-=8;
if(cnt>=11900&&cnt<13000) cnt-=9;
if(cnt>=13000&&cnt<=100000)
{
k=cnt/1000;
for(i=0;i<88;i++)
{
if(k==f_table[i])
{
cnt-=f_correct[i];
}
}
}
}
if(cnt>100000)
{
wucha=(cnt/1000)*73065/100000;
cnt-=wucha;
}
}
void main()
{
timer_init();
lcd_init();
while(1)
{
if(flag==1)
{
real_display();
flag=0;
}
}
}
void timer0() interrupt 1
{
uchar timer0;
TH0=0x3c; //50ms
TL0=0xb0;
timer0++;
if(timer0==20)
{
TR1=0; //关闭的计数器
EA=0;
cnt=TL1+TH1*256+f_cnt*65536;
correct();
//cnt1=(1e+9)/(2*0.693 *cnt)-20000/2;
if(!R)
{
// while(!R);
cnt1=1000000/(0.2*0.693*cnt)-165;
}
else if(!C)
{
cnt1=1000000000/(0.693*3*510*cnt);
}
else if(!L)
{
cnt1=(1e+9)/(4*3.14*3.14*cnt*cnt*0.05);
}
timer0=0;
a6=cnt1%10000000/100000;
a5=cnt1%100000/10000;
a4=cnt1%10000/1000;
a3=cnt1%1000/100;
a2=cnt1%100/10;
a1=cnt1%10;
flag=1;
TH1=0;
TL1=0;
TH0=0x3c;
TL0=0xb0;
cnt=0;
f_cnt=0;
EA=1;
TR1=1; //打开计数器
}
}
void int1() interrupt 3
{
f_cnt++;
}
报告格式规范,字数6952,含各种框图。
报告部分内容
1 电阻测试仪的发展历史及研究现状
当今电子测试领域,电阻,电容和电感的测量已经在测量技术和产品研发中应用的十分广泛。 电阻测试发展已经很久,方法众多,常用测量方法如下。电阻测量依据产生恒流源的方法分为电位降法、比例运算器法和积分运算器法。比例运算器法测量误差稍大,积分运算器法适用于高电阻的测量。传统的测量电容方法有谐振法和电桥法两种。前者电路简单,速度快,但精度低;后者测量精度高,但速度慢。随着数字化测量技术的发展,在测量速度和精度上有很大的改善,电容的数字化测量常采用恒流法和比较法。电感测量可依据交流电桥法,这种测量方法虽然能较准确的测量电感但交流电桥的平衡过程复杂,且通过测量Q值确定电感的方法误差较大,所以电感的数字化测量常采用时间常数发和同步分离法。
将一个运算放大器的输出端与其反相输入端直接连接,形成一个电压跟随器; 将基准精密电阻®的一端与被隔离的在线元件(Z↓[x])的一端通过导线连接,基准精密电阻®的另一端与信号源(V↓[i])或者地连接,被隔离的在线元件(Z↓[x])的另一端通过导线与地或者信号源(V↓[i])连接,基准精密电阻®与被隔离的在线元件(Z↓[x])连接的一端同时与运算放大器的同相输入端连接;中国本土测量仪器设备发展的主要瓶颈。尽管本土测试测量产业得到了快速发展,但客观地说中国开发测试测量仪器还普遍比较落后。每当提起中国测试仪器落后的原因,就会有许多不同的说法,诸如精度不高,外观不好,可靠性差等。实际上,这些都还是表面现象,
真正影响中国测量仪器发展的瓶颈为:
测试在整个产品流程中的地位偏低。由于人们的传统观念的影响,在产品的制造流程中,研发始终处于核心位置,而测试则处于从属和辅助位置。关于这一点,在几乎所有的研究机构部门配置上即可窥其一斑。这种错误观念上的原因,造成整个社会对测试的重视度不够,从而造成测试仪器方面人才的严重匮乏,造成相关的基础科学研究比较薄弱,这是中国测量仪器发展的一个主要瓶颈。实际上,即便是研发队伍本身,对测试的重视度以及对仪器本身的研究也明显不够。
面向应用和现代市场营销模式还没有真正建立起来。本土仪器设备厂商只是重研发,重视生产,重视狭义的市场,还没有建立起一套完整的现代营销体系和面向应用的研发模式。传统的营销模式在计划经济年代里发挥过很大作用,但无法满足目前整体解方案流行年代的需求。所以,为了快速缩小与国外先进公司之间的差距,国内仪器研发企业应加速实现从面向仿制的研发向面向应用的研发的过渡。特别是随着国内应用需求的快速增长,为这一过渡提供了根本动力,应该利用这些动力,跟踪应用技术的快速发展。
下载方式见文章开头视频或下方链接
百度云网盘资料下载链接:
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
因为我现在正在做一些时间测量,我想知道是否可以在不使用Benchmark类或命令行实用程序time的情况下测量用户时间或系统时间。使用Time类只显示挂钟时间,而不显示系统和用户时间,但是我正在寻找具有相同灵active的解决方案,例如time=TimeUtility.now#somecodeuser,system,real=TimeUtility.now-time原因是我有点不喜欢Benchmark,因为它不能只返回数字(编辑:我错了-它可以。请参阅下面的答案。)。当然,我可以解析输出,但感觉不对。*NIX系统的time实用程序也应该可以解决我的问题,但我想知道是否已经在Ruby中实
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
本人是音乐爱好者,从小就特别喜欢那个随着音乐跳动的方框效果,就是这个:arduino上一大把对,我忍你很久了,我就想用mpy做,全网没有,行我自己研究。果然兴趣是最好的老师,我之前有篇博客专门讲音频,有兴趣的可以回顾一下。提到可视化频谱,必然绕不开fft,大学学过这玩意,当时一心玩,老师讲的一个字都么听进去,网上教程简略扫了一下,大该就是把时域转频域的工具,我大mpy居然没有fft函数,奶奶的,先放着。音频信息如何收集?第一种傻瓜式的ADC,模拟转数字,原始粗暴,第二种,I2S库,我之前博客有讲过,数据是PCM编码。然后又去学PCM编码,一学豁然开朗,舒服,以代码为例:audio_in=I2S
我编写了一个非常简单的Sassmixin,用于将像素值转换为rem值(请参阅JonathanSnook的articleonthebenefitsofusingrems)。这是代码://MixinCode$base_font_size:10;//10px@mixinrem($key,$px){#{$key}:#{$px}px;#{$key}:#{$px/$base_font_size}rem;}//Includesyntaxp{@includerem(font-size,14);}//RenderedCSSp{font-size:14px;font-size:1.4rem;}这个mixi
目录SPI总线SPI总线概述 SPI总线分类SPI优点及缺点SPI接口硬件原理SPI四种工作模式 74HC595应用74HC595芯片概述74HC595封装及管脚功能74HC595工作原理 编辑 74HC595串行转并行点亮LED灯 程序实现 Proteus运行结构示意图SPI总线SPI总线概述 SPI(SerialPeripheralinterface):串行外围设备接口 用途:用来在微控制器与外围设备芯片之间实现数据交换 特点:高速、全双工、同步 SPI总线分类四线制全双工SPI(同时收发)MISO 主机输入/从机输出MOSI 主机输出/从机输入SCLK 串行时钟CS或
文章目录1简介2绪论2.1课题背景与目的3系统设计详细设计描述3.2硬件部分温度测量电路其他电路部分3.3软件部分主程序子系统程序温湿度程序流程键盘显示子程序3.4实现效果3.5部分相关代码4最后1简介Hi,大家好,这里是丹成学长,今天向大家介绍一个单片机项目基于单片机的智能温控农业大棚系统大家可用于课程设计或毕业设计单片机-嵌入式毕设选题大全及项目分享:https://blog.csdn.net/m0_71572576/article/details/1254090522绪论2.1课题背景与目的近年来我国的温室控制取得了长足的进步,首先在温室群控制方面,进行了初步的探索和理论研究,其次在温室
一、概述在之前的一篇博文中,记录了AT24C01、AT24C02芯片的读写驱动,先将之前的相关文章include一下:1.IIC驱动:4位数码管显示模块TM1637芯片C语言驱动程序2.AT24C01/AT24C02读写:AT24C01/AT24C02系列EEPROM芯片单片机读写驱动程序本文记录分享AT24C04、AT24C08、AT24C16芯片的单片机C语言读写驱动程序。二、芯片对比介绍型号容量bit容量byte页数字节/页器件寻址位可寻址器件数WordAddress位数/字节数备注AT24C044k5123216A2A149/1WordAddress使用P0位AT24C088k1024