前 言:作为当前先进的深度学习目标检测算法YOLOv5,已经集合了大量的trick,但是还是有提高和改进的空间,针对具体应用场景下的检测难点,可以不同的改进方法。此后的系列文章,将重点对YOLOv5的如何改进进行详细的介绍,目的是为了给那些搞科研的同学需要创新点或者搞工程项目的朋友需要达到更好的效果提供自己的微薄帮助和参考。
解决问题:YOLOv5主干特征提取网络为CNN网络,CNN具有平移不变性和局部性,缺乏全局建模长距离建模的能力,引入自然语言处理领域的框架Transformer来形成CNN+Transformer架构,充分两者的优点,提高目标检测效果,本人经过实验,对小目标以及密集预测任务会有一定的提升效果。
原理:
作者单位:UC Berkeley, 谷歌
论文:https://arxiv.org/abs/2101.1160![]() https://link.zhihu.com/?target=https%3A//arxiv.org/abs/2101.11605
https://link.zhihu.com/?target=https%3A//arxiv.org/abs/2101.11605
GitHub:https://github.com/leaderj1001/BottleneckTransformers
BoTNet是一种简单却功能强大的backbone,该架构将自注意力纳入了多种计算机视觉任务,包括图像分类,目标检测和实例分割。通过仅在ResNet的最后三个bottleneck blocks中用全局自注意力替换空间卷积,并且不进行其他任何更改,在目标检测方面显著改善了基线,同时还减少了参数,从而使延迟最小化。
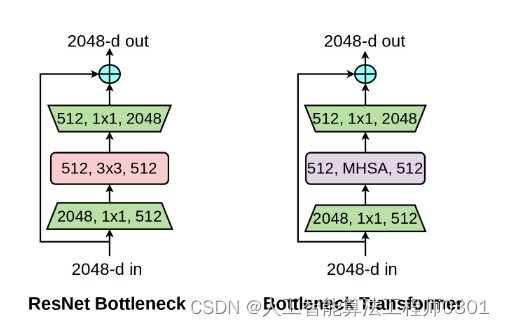
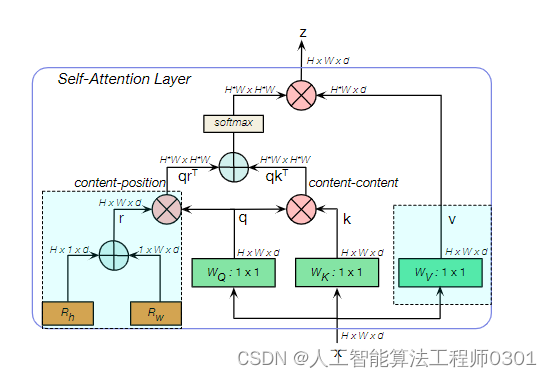
Transformer中的MHSA和BoTNet中的MHSA的区别:
归一化,Transformer使用 Layer Normalization,而BoTNet使用 Batch Normalization。
非线性激活,Transformer仅仅使用一个非线性激活在FPN block模块中,BoTNet使用了3个非线性激活。
输出投影,Transformer中的MHSA包含一个输出投影,BoTNet则没有。
优化器,Transformer使用Adam优化器训练,BoTNet使用sgd+ momentum
方 法:
第一步修改common.py,增加CTR3模块。
class MHSA(nn.Module):
def __init__(self, n_dims, width=14, height=14, heads=4,pos_emb=False):
super(MHSA, self).__init__()
self.heads = heads
self.query = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.key = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.value = nn.Conv2d(n_dims, n_dims, kernel_size=1)
self.pos=pos_emb
if self.pos :
self.rel_h = nn.Parameter(torch.randn([1, heads, (n_dims ) // heads, 1, int(height)]), requires_grad=True)
self.rel_w = nn.Parameter(torch.randn([1, heads, (n_dims )// heads, int(width), 1]), requires_grad=True)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x):
n_batch, C, width, height = x.size()
q = self.query(x).view(n_batch, self.heads, C // self.heads, -1)
k = self.key(x).view(n_batch, self.heads, C // self.heads, -1)
v = self.value(x).view(n_batch, self.heads, C // self.heads, -1)
#print('q shape:{},k shape:{},v shape:{}'.format(q.shape,k.shape,v.shape)) #1,4,64,256
content_content = torch.matmul(q.permute(0,1,3,2), k) #1,C,h*w,h*w
# print("qkT=",content_content.shape)
c1,c2,c3,c4=content_content.size()
if self.pos:
# print("old content_content shape",content_content.shape) #1,4,256,256
content_position = (self.rel_h + self.rel_w).view(1, self.heads, C // self.heads, -1).permute(0,1,3,2) #1,4,1024,64
content_position = torch.matmul(content_position, q)# ([1, 4, 1024, 256])
content_position=content_position if(content_content.shape==content_position.shape)else content_position[:,: , :c3,]
assert(content_content.shape==content_position.shape)
#print('new pos222-> shape:',content_position.shape)
# print('new content222-> shape:',content_content.shape)
energy = content_content + content_position
else:
energy=content_content
attention = self.softmax(energy)
out = torch.matmul(v, attention.permute(0,1,3,2)) #1,4,256,64
out = out.view(n_batch, C, width, height)
return out
class BottleneckTransformer(nn.Module):
# Transformer bottleneck
#expansion = 1
def __init__(self, c1, c2, stride=1, heads=4, mhsa=True, resolution=None,expansion=1):
super(BottleneckTransformer, self).__init__()
c_=int(c2*expansion)
self.cv1 = Conv(c1, c_, 1,1)
#self.bn1 = nn.BatchNorm2d(c2)
if not mhsa:
self.cv2 = Conv(c_,c2, 3, 1)
else:
self.cv2 = nn.ModuleList()
self.cv2.append(MHSA(c2, width=int(resolution[0]), height=int(resolution[1]), heads=heads))
if stride == 2:
self.cv2.append(nn.AvgPool2d(2, 2))
self.cv2 = nn.Sequential(*self.cv2)
#self.bn2 = nn.BatchNorm2d(planes)
#self.cv3 = nn.Conv2d(planes, expansion * planes, kernel_size=1, bias=False)
#self.bn3 = nn.BatchNorm2d(expansion * planes)
#self.shortcut = nn.Sequential()
self.shortcut = c1==c2
if stride != 1 or c1 != expansion*c2:
self.shortcut = nn.Sequential(
nn.Conv2d(c1, expansion*c2, kernel_size=1, stride=stride),
nn.BatchNorm2d(expansion*c2)
)
self.fc1 = nn.Linear(c2, c2)
def forward(self, x):
#print("transforme input bottleck shape:",x.shape)
# out = F.relu(self.bn1(self.conv1(x)))
# out = F.relu(self.bn2(self.conv2(out)))
# out = self.bn3(self.conv3(out))
# out += self.shortcut(x)
# out = F.relu(out)
out=x + self.cv2(self.cv1(x)) if self.shortcut else self.cv2(self.cv1(x))
return out
class CTR3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1,e=0.5,e2=1,w=20,h=20): # ch_in, ch_out, number, , expansion,w,h
super(CTR3, self).__init__()
c_ = int(c2*e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)
self.m = nn.Sequential(*[BottleneckTransformer(c_ ,c_, stride=1, heads=4,mhsa=True,resolution=(w,h),expansion=e2) for _ in range(n)])
# self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)])
def forward(self, x):
#print("CTR3-INPUT:",x.shape)
# return self.cv3
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))第二步:将yolo.py中注册CTR3模块。
if m in [Conv,MobileNetV3_InvertedResidual,ShuffleNetV2_InvertedResidual,ghostc3,DepthSepConv,CTR3
]:第三步:进行修改yaml文件
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, CTR3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
结 果:本人在多个数据集上做了大量实验,针对不同的数据集效果不同,以及不同位置添加,都会有一定的差异。
预告一下:下一篇内容将继续分享其他Transformer模块的融合。有兴趣的朋友可以关注一下我,有问题可以留言或者私聊我哦
PS:Transformer不仅仅是适用改进YOLOv5,也可以改进其他的YOLO网络以及目标检测网络,比如YOLOv3、v4、v6、v7等。
Transformers开始在视频识别领域的“猪突猛进”,各种改进和魔改层出不穷。由此作者将开启VideoTransformer系列的讲解,本篇主要介绍了FBAI团队的TimeSformer,这也是第一篇使用纯Transformer结构在视频识别上的文章。如果觉得有用,就请点赞、收藏、关注!paper:https://arxiv.org/abs/2102.05095code(offical):https://github.com/facebookresearch/TimeSformeraccept:ICML2021author:FacebookAI一、前言Transformers(VIT)在图
我有这个代码:context"Visitingtheusers#indexpage."dobefore(:each){visitusers_path}subject{page}pending('iii'){shouldhave_no_css('table#users')}pending{shouldhavecontent('Youhavereachedthispageduetoapermissionic错误')}它会导致几个待处理,例如ManagingUsersGivenapractitionerloggedin.Visitingtheusers#indexpage.#Noreason
在尝试实现应用auto_orient的过程之后!对于我的图片,我收到此错误:ArgumentError(noimagesinthisimagelist):app/uploaders/image_uploader.rb:36:in`fix_exif_rotation'app/controllers/posts_controller.rb:12:in`create'Carrierwave在没有进程的情况下工作正常,但在添加进程后尝试上传图像时抛出错误。流程如下:process:fix_exif_rotationdeffix_exif_rotationmanipulate!do|image|
希望我没有误解“ducktyping”的含义,但从我读到的内容来看,这意味着我应该根据对象如何响应方法而不是它是什么类型/类来编写代码。代码如下:defconvert_hash(hash)ifhash.keys.all?{|k|k.is_a?(Integer)}returnhashelsifhash.keys.all?{|k|k.is_a?(Property)}new_hash={}hash.each_pair{|k,v|new_hash[k.id]=v}returnnew_hashelseraise"CustomattributekeysshouldbeID'sorPropertyo
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
我已经安装了最新版本的compass、sass和susy。但我仍然收到此错误:Unabletoactivatesusy-2.1.1,becausesass-3.2.17conflictswithsass(~>3.3.0)有人知道这个Ruby是如何工作的吗?这是我安装的gem的列表:***LOCALGEMS***CFPropertyList(2.2.0)chunky_png(1.3.0)compass(0.12.4)compass-core(1.0.0.alpha.19)compass-import-once(1.0.4)compass-rails(1.1.3)fssm(0.2.10)l
我在Backtrack5中使用Ruby1.9.2dev编写脚本,但在尝试使用库“htmlentities”解析html实体时遇到了一些问题。虽然我已经用gem安装了它,但我无法加载它。我将向您展示我在控制台中遇到的问题:root@bt:~#gemlist-dhtmlentities***LOCALGEMS***htmlentities(4.3.1)Author:PaulBattleyHomepage:https://github.com/threedaymonk/htmlentitiesInstalledat:/var/lib/gems/1.9.2Amoduleforencodinga
我用这个错误搜索了jekyll。jekyll处理页面时似乎出现了ruby错误,但我根本不了解ruby。杰基尔版本1.3.1我什至重新安装了ruby和jekyll,但结果没有改变。更新:在我将jekyll从1.31降级到1.20后,这个错误消失了注意:我的网站是用jekyll1.20创建的,所以它不能用1.3.1构建?这是核心问题吗?E:\GitHub\sample>jekyll服务--trace:Configurationfile:E:/GitHub/sample/_config.ymlSource:E:/GitHub/sampleDestination:E:/GitHub
我有一个作为守护程序运行的Sinatra应用程序,使用Apache端口转发在端口80和端口7655之间进行调解。这在过去一直运行良好。今天,不太好。我不明白为什么。问题:sudorubymy_process.rb返回:/var/lib/gems/1.9.1/gems/eventmachine-1.0.0/lib/eventmachine.rb:526:in`start_tcp_server':noacceptor(portisinuseorrequiresrootprivileges)(RuntimeError)尝试过:更新所有系统包,更新所有gem。没有帮助(除了来自eventm
或者,更具体地说:我不能只使用私有(private)方法吗? 最佳答案 据我了解,Thor具有将方法标记为notasks的方法因为方法是任务的概念不同于方法的visibility的概念。.他们需要区分,因为他们从事不同的工作。类Thor的子类的每个方法(独立于其可见性)都被视为任务,除非它被明确标记为无任务。通过控制任务的可见性,您可以控制对该任务的访问,例如如果您将任务设为私有(private),则它不能被子类调用或直接被用户调用。访问控制不同于某事是否是任务。非任务的方法不能被Thor直接调用,它们不能有options.这里举个