选择模型:选择cmosedu_models自带的N_50n 50nm晶体管
方法:使用直流扫描,对vds,vgs同时扫描 范围都为0-1v,间隔为0.1(vds也可不选择间隔)
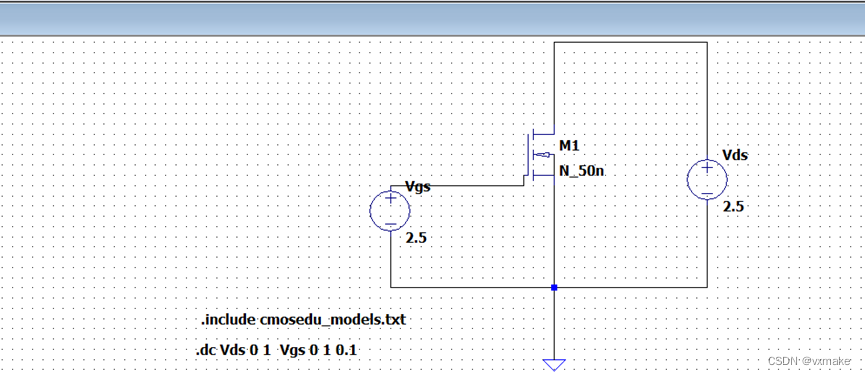
模型图
选择run运行,将表笔放在d段,当表笔出现黑色时查看d端的电流。
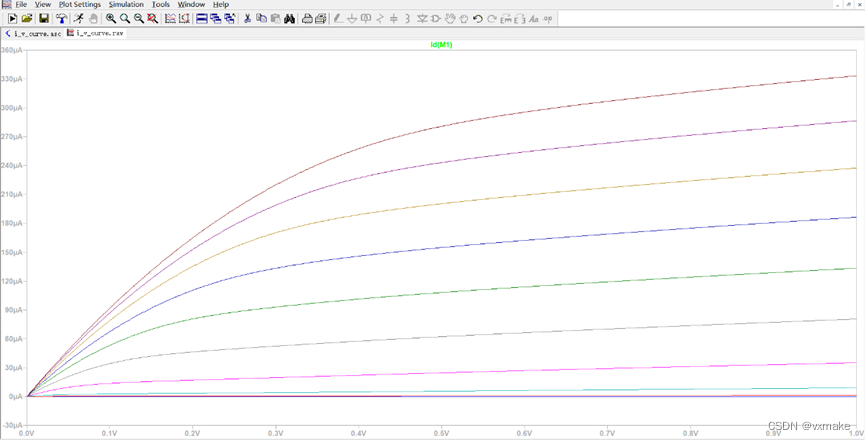
获得如图所示的nmos i-v曲线横轴为vds,纵轴为id,不同曲线代表不同的vgs下的id-vds曲线(默认背景色为黑色,选择在tools中的color preference 更改背景颜色)
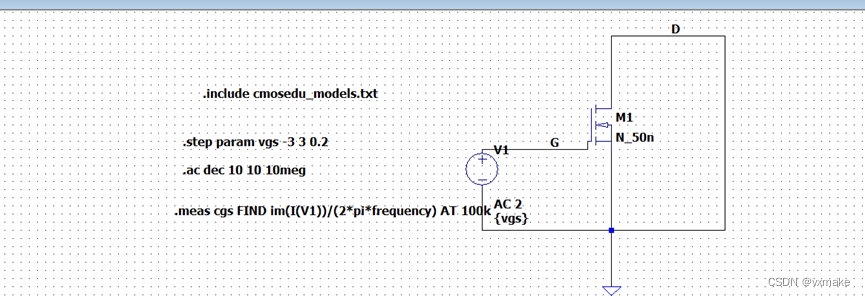
加一个小的交流信号在栅极,根据公式C=1/(Xw),X=1/im(I(V1)),w=2PIF,则可获得栅极电容。
模型选择: 选择cmosedu_models自带的N_50n 50nm晶体管
方法选择:交流分析 从10hz到10M hz定义vgs为一个量(param),并进行扫描(.step),
用meas定义cgs量
运行:点击run运行,在view中查看spice error log,找到定义的cgs量,右键选择plot
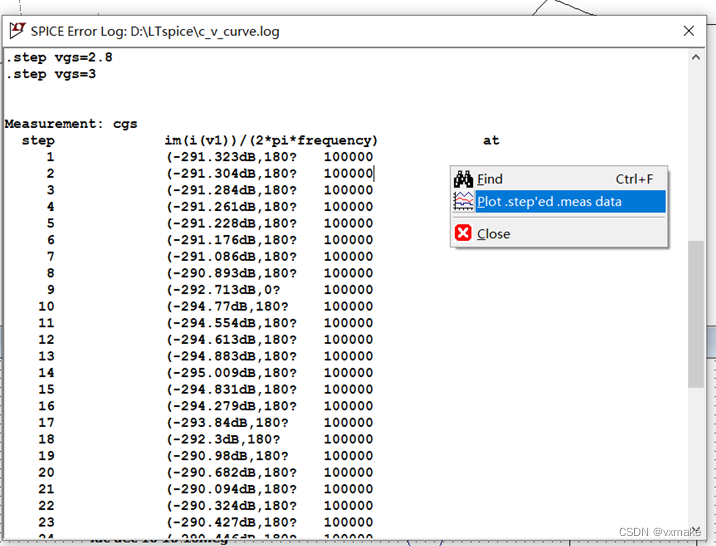
此时横轴为vgs,竖轴单位为db,右键竖轴修改为linear
则可得到合适的c-v曲线
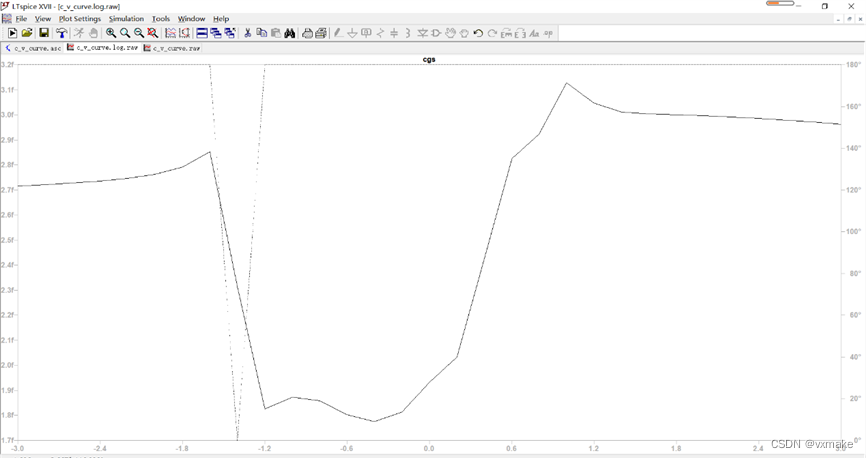
可以看出在VGS接近VT时,栅电容下降,截止区和电阻区的电容大致相当且为直线
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
我在一家express公司工作。我们目前通过“手动”解决了50多个位置路线。我一直在考虑使用GoogleMapsAPI来解决这个问题,但我读到有24分的限制。目前我们在服务器中使用Rails,所以我正在考虑使用ruby脚本来获取50多个位置的坐标并输出合理的解决方案。您会使用什么算法来解决这个问题?Ruby是解决这类问题的好编程语言吗?你知道任何现有的ruby脚本吗? 最佳答案 这可能是您正在寻找的:警告:此站点被firefox标记为攻击站点-但我似乎没有。其实我之前用过没问题[检查URL的修订历史]rubyquiz似乎已关
我正在寻找进行对数回归(对数方程的曲线拟合)的Rubygem或库。我试过statsample(http://ruby-statsample.rubyforge.org/),但它似乎没有我要找的东西。有人有什么建议吗? 最佳答案 尝试使用“statsample”gem。您可以使用类似的方法执行指数、对数、幂、正弦或任何其他变换。我希望这有帮助。require'statsample'#IndependentVariablex_data=[Math.exp(1),Math.exp(2),Math.exp(3),Math.exp(4),Ma
我正在尝试编写Ruby代码来检查我发现的特定消息上的椭圆曲线数字签名算法(ECDSA)签名here.问题是我不知道如何将公钥的八位字节字符串转换为OpenSSL::PKey::EC::Point目的。如果我用C写这个,我会把八位字节字符串传递给OpenSSL的o2i_ECPublicKey,它做的事情接近我想要的,实际上被referenceimplementation使用.但是,我搜索了sourcecodeofRuby(MRI)而且它不包含对o2i_ECPublicKey的调用,所以我不知道如何在不编写C扩展的情况下使用Ruby中的该函数。这是十六进制的八位字节字符串。它只是一个0x0
汽车芯片赛道的「卷」,或许超出了所有人的预期。对于单纯TOPS算力的比拼,已经翻篇,如何让车企有的用,用得上,还要用得好,已经是新风向。实际上,在汽车智能化刚刚开始的2018年,彼时类似斑马智行这样的车机系统仅仅是从软件层面改变传统座舱的人机交互体验(从功能机到智能机)。而类似Mobileye这样的ADAS视觉感知系统方案(EyeQ5之前),也仅仅是辅助驾驶的入门级。在高工智能汽车研究院看来,汽车芯片赛道经历了几个发展周期,1.0时代(以2020年上车的高通8155为代表),智能座舱进入硬件变革节点;2.0时代(以2021年上车的英伟达Orin为代表),智能驾驶进入硬件变革节点。而3.0时代,
1、单片机控制液晶显示模块1602LCD的显示。液晶显示器(LiquidCrystalDisplay,LCD)具有省电、体积小、抗干扰能力强等优点,LCD显示器分为字段型、字符型和点阵图形型。(1)字段型。以长条状组成字符显示,主要用于数字显示,也可用于显示西文字母或某些字符,广泛用于电子表、计算器、数字仪表中。(2)字符型。专门用于显示字母、数字、符号等。一个字符由5、7或5、10的点阵组成,在单片机系统中已广泛使用(3)点阵图形型。广泛用于图形显示,如笔记本电脑、彩色电视和游戏机等。它是在平板上排列的多行列的矩阵式的晶格点,点大小与多少决定了显示的清晰度。引脚包括8条数据线、3条控制线和3
虽然我在本地主机上工作正常,但我不确定为什么我的下面的代码不能处理我主机上任何大于50kb的文件。我测试了许多不同的文件大小,我很确定50kb是它的极限。如果文件大于50kb,则永远不会将其传递给process.php。如果一个文件小于50kb,它会被传递给process.phpok。有没有人可以帮我解决这个问题。我被这个问题困了几个小时。我确实在php.ini中将upload_max_filesize设置为5M。$(document).ready(function(){$('#img_uploader').on('change',function(){uploadFiles(this
所以我写了一个微生物动画。这一切都很酷,但我认为,如果微生物能够吃掉硅藻并破坏气泡,那就更好了。问题在于微生物是由贝塞尔曲线构成的。我不知道如何以合理的方式检查由贝塞尔曲线构成的对象与圆之间的碰撞。我唯一想到的是在隐藏的Canvas上绘制微生物形状和气泡,然后检查它们是否绘制到相同的像素。但这会导致严重的性能问题恕我直言。代码:https://codepen.io/michaelKurowski/pen/opWeKYclassCell是单元格,而classCellWallNode是贝塞尔曲线的节点,以防有人需要查看实现。气泡和硅藻可以很容易地简化为圆形。 最
你能给我一个算法的例子吗?alttexthttp://ryancalderoni.com/archive/ideal_curve.jpg编辑:然后我将如何使用Javascript计算数学?有人可以添加吗?很抱歉最初没有包含该上下文..注意:我正在使用“flot”来绘制它,flot的输入是一个javascript数组,如下所示:[[x,y],[x,y],[x,y]...]因此,给定改变曲线的值,我将所有点输出到一个带有循环的数组,然后将其吐出以float到图形中。 最佳答案 典型的S型曲线是tanh(x)曲线。根据定义,tanh(x)