总结:
- LinkedList继承自List,具备有序性
- LinkedList继承自Deque,具备链表关联性
- LinkedList集合进行增删改查操作底层实际是操作Node节点的前后链接关系
- LinkedList进行增删操作时,仅需要操作节点的前后链接关系,因此效率较ArrayList高
- LinkedList进行查找操作时,必须从头或者从尾进行查找,因此较底层依靠数组进行存储的ArrayList查找效率低
public class LinkedList01 {
public static void main(String[] args) {
LinkedList linkedList = new LinkedList(); //执行第1步
linkedList.add(1); //执行第2步
linkedList.add(2); //执行第3步
linkedList.add(3); //执行第4步
linkedList.add(1 , new Intger(8)); //执行第8步
linkedList.add(5);
linkedList.remove(); //执行第5步
linkedList.remove(2); //执行第6步
linkedList.remove(new Integer(3)); //执行第7步
System.out.println(linkedList);
}
}
//LinkedList类默认构造器
public LinkedList() {}
transient int size = 0; //集合存放对象个数
transient Node<E> first; //集合中第一个节点
transient Node<E> last; //集合中最后一个节点
...
//AbstractSequentialList类默认构造器
protected AbstractSequentialList() {}
...
//AbstractList类默认构造器
protected AbstractList() {}
protected transient int modCount = 0;
...
//AbstractCollection类默认构造器
protected AbstractCollection() {}
...
//Object类默认构造器
public Object() {}
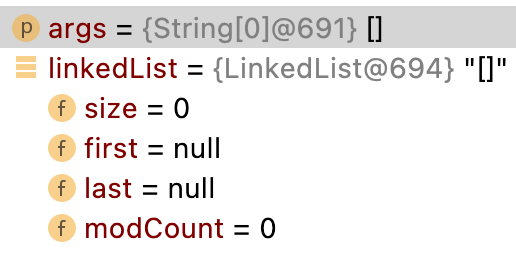
结果:还没有存放对象,属于空集合
public boolean add(E e) { //e = 1
linkLast(e);
return true;
}
...
void linkLast(E e) {
final Node<E> l = last;//l = null
final Node<E> newNode = new Node<>(l, e, null);//创建新的节点,当前节点的prev和next属性均为null,将存入集合的对象赋值给item
last = newNode;//LinkedList集合的last属性指向新节点
if (l == null)//此时i=null,条件成立
first = newNode;//LinkedList集合的first属性指向新节点
else
l.next = newNode;
size++;//LinkedList集合的容量自加1
modCount++;//LinkedList集合修改次数自加1
}
......
//Node是LinkedList类的内部类
private static class Node<E> {
E item; //LinkedLIst实际存放的对象
Node<E> next; //当前节点的下一个节点
Node<E> prev; //当前节点的前一个节点
Node(Node<E> prev, E element, Node<E> next) {
this.item = element;
this.next = next;
this.prev = prev;
}
}
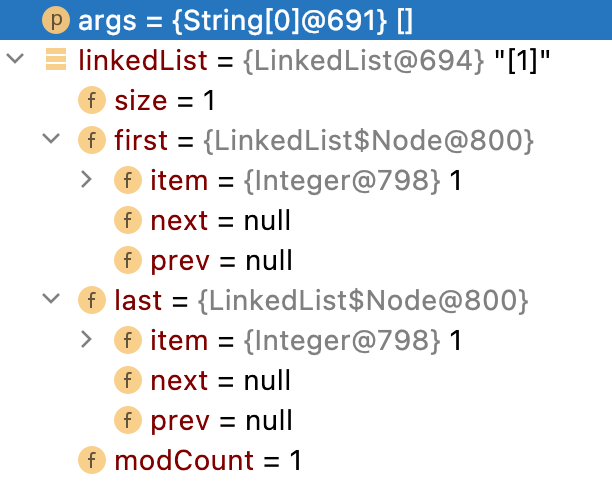
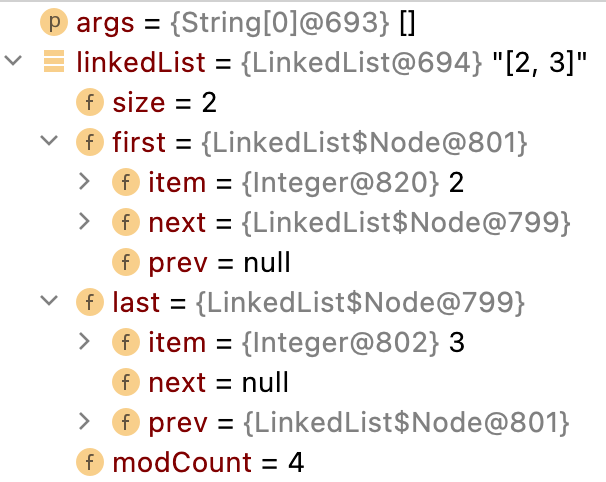
结果:集合中存放1个元素,LinkedList类中first与last属性相同,Node类中prev与next属性为null
public boolean add(E e) { //e = 2
linkLast(e);
return true;
}
...
void linkLast(E e) {
final Node<E> l = last;//l = 1,表示上一个节点
final Node<E> newNode = new Node<>(l, e, null);//创建新的节点,节点的prev属性指向上一个节点,item属性存放当前对象
last = newNode;//LinkedList集合的last属性指向新节点
if (l == null)//此时i!=null,条件不成立
first = newNode;
else
l.next = newNode;//上一个节点的next属性指向当前节点,即新创建的节点
size++;//LinkedList集合的容量自加1
modCount++;//LinkedList集合修改次数自加1
}
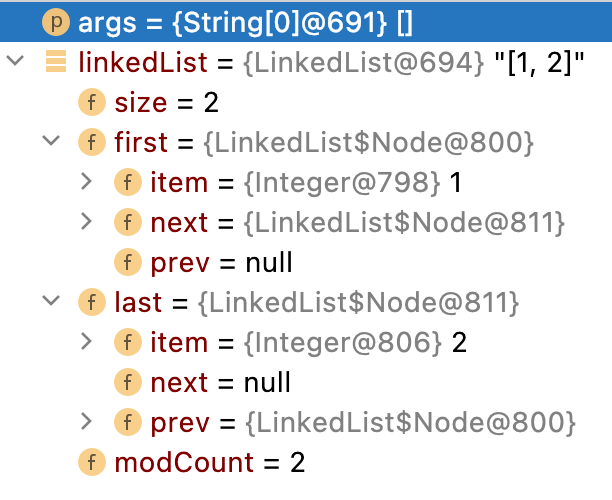
结果:
public boolean add(E e) { //e = 3
linkLast(e);
return true;
}
...
void linkLast(E e) {
final Node<E> l = last;//l = 2,表示上一个节点
final Node<E> newNode = new Node<>(l, e, null);//创建新的节点,节点的prev属性指向上一个节点,
item属性存放当前对象
last = newNode;//LinkedList集合的last属性指向新节点
if (l == null)//此时i!=null,条件不成立
first = newNode;
else
l.next = newNode;//上一个节点的next属性指向当前节点,即新创建的节点
size++;//LinkedList集合的容量自加1
modCount++;//LinkedList集合修改次数自加1
}
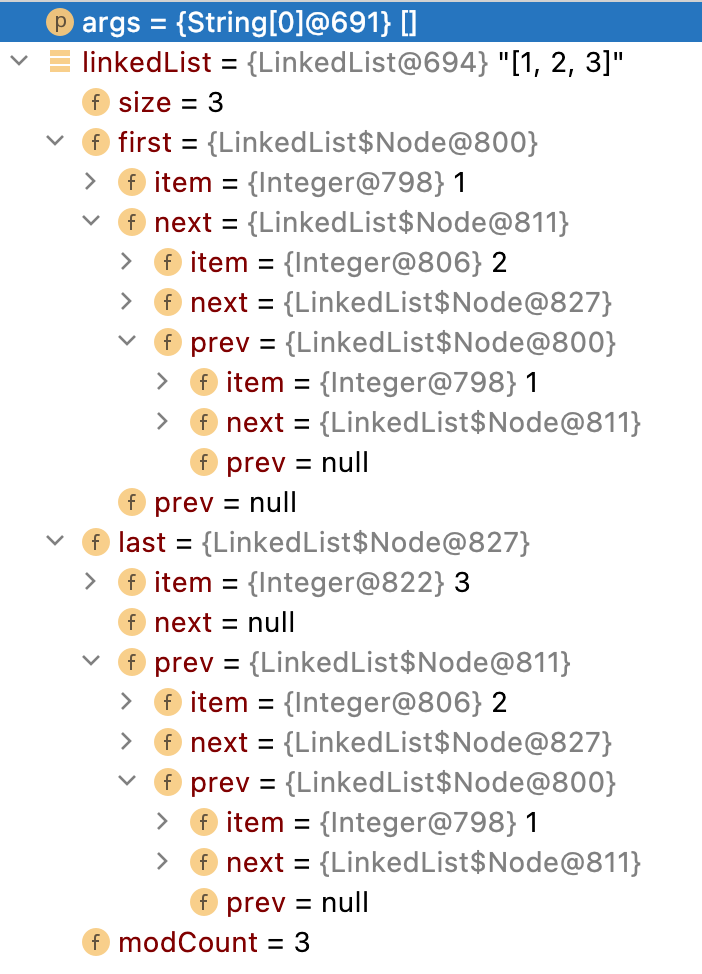
结果:

public E remove() {
return removeFirst();
}
...
public E removeFirst() {
final Node<E> f = first;
if (f == null)
throw new NoSuchElementException();
return unlinkFirst(f);
}
...
private E unlinkFirst(Node<E> f) {
// assert f == first && f != null;
final E element = f.item; //将集合中第一个节点的item 属性赋值给element
final Node<E> next = f.next; //将集合中第一个节点的next属性赋值给next
f.item = null;
f.next = null; // help GC
first = next; //将原集合中的第二个节点赋给集合的first属性
if (next == null)
last = null;
else
next.prev = null;//将原集合中的第二个节点的prev属性赋值为null
size--; //集合元素个数自减1
modCount++; //集合修改次数自加1
return element; //返回被删除的节点item值
}
public E remove(int index) { //index = 2
checkElementIndex(index); //1.嵌套执行下边两个方法①和②,确定索引正确后继续往下执行
return unlink(node(index)); //2.执行方法③与④
}
...
//方法①
private void checkElementIndex(int index) {
if (!isElementIndex(index))
throw new IndexOutOfBoundsException(outOfBoundsMsg(index));
}
...
//方法②
private boolean isElementIndex(int index) {
return index >= 0 && index < size;
}
...
//方法③
Node<E> node(int index) { //index = 2, size = 4
// assert isElementIndex(index);
if (index < (size >> 1)) { //index < size/2时
Node<E> x = first; //x记录首个节点
for (int i = 0; i < index; i++)
x = x.next; //找到索引位置对应的节点
return x;
} else {
Node<E> x = last;
for (int i = size - 1; i > index; i--)
x = x.prev;
return x;
}
}
...
//方法④
E unlink(Node<E> x) { //需要删除的节点
// assert x != null;
final E element = x.item;
final Node<E> next = x.next;
final Node<E> prev = x.prev;
if (prev == null) { //对于首个节点的情况
first = next;
} else {
prev.next = next;
x.prev = null;
}
if (next == null) { //对于尾端节点的情况
last = prev;
} else {
next.prev = prev;
x.next = null;
}
x.item = null; //此时该节点中的属性item、prev、next均为null
size--; //集合元素个数自减1
modCount++; //集合修改次数自加1
return element; //返回被删除节点中的内容
}
//本方法可以用来删除集合中对象和null
public boolean remove(Object o) { o = new Integer(3)
if (o == null) {
for (Node<E> x = first; x != null; x = x.next) {
if (x.item == null) {
unlink(x);
return true;
}
}
} else {
for (Node<E> x = first; x != null; x = x.next) {
if (o.equals(x.item)) {
unlink(x); //调用方法与第6步中流程一致
return true;
}
}
}
return false;
}
public void add(int index, E element) { //index=1, element = new Integer(8)
checkPositionIndex(index); //检查索引没有问题
if (index == size) //如果索引与集合大小相等
linkLast(element);
else
linkBefore(element, node(index)); //node(index)方法找到该索引位置的节点,然后采用linkBefore方法在其节点前链接入新的节点
}
...
void linkLast(E e) {
final Node<E> l = last;
final Node<E> newNode = new Node<>(l, e, null);
last = newNode;
if (l == null) //表示原集合中还没有存放元素
first = newNode;
else
l.next = newNode;
size++;
modCount++;
}
...
void linkBefore(E e, Node<E> succ) { //e = new Integer(8)待链接入的节点,succ为原index位置的节点
// assert succ != null;
final Node<E> pred = succ.prev;
final Node<E> newNode = new Node<>(pred, e, succ);
succ.prev = newNode;
if (pred == null)
first = newNode;
else
pred.next = newNode;
size++;
modCount++;
}
一、引擎主循环UE版本:4.27一、引擎主循环的位置:Launch.cpp:GuardedMain函数二、、GuardedMain函数执行逻辑:1、EnginePreInit:加载大多数模块int32ErrorLevel=EnginePreInit(CmdLine);PreInit模块加载顺序:模块加载过程:(1)注册模块中定义的UObject,同时为每个类构造一个类默认对象(CDO,记录类的默认状态,作为模板用于子类实例创建)(2)调用模块的StartUpModule方法2、FEngineLoop::Init()1、检查Engine的配置文件找出使用了哪一个GameEngine类(UGame
//1.验证返回状态码是否是200pm.test("Statuscodeis200",function(){pm.response.to.have.status(200);});//2.验证返回body内是否含有某个值pm.test("Bodymatchesstring",function(){pm.expect(pm.response.text()).to.include("string_you_want_to_search");});//3.验证某个返回值是否是100pm.test("Yourtestname",function(){varjsonData=pm.response.json
Transformers开始在视频识别领域的“猪突猛进”,各种改进和魔改层出不穷。由此作者将开启VideoTransformer系列的讲解,本篇主要介绍了FBAI团队的TimeSformer,这也是第一篇使用纯Transformer结构在视频识别上的文章。如果觉得有用,就请点赞、收藏、关注!paper:https://arxiv.org/abs/2102.05095code(offical):https://github.com/facebookresearch/TimeSformeraccept:ICML2021author:FacebookAI一、前言Transformers(VIT)在图
我正在构建一个小部件来显示奥运会的奖牌数。我有一个“国家”对象的集合,其中每个对象都有一个“名称”属性,以及奖牌计数的“金”、“银”、“铜”。列表应该排序:1.首先是奖牌总数2.如果奖牌相同,按类型分割(金>银>铜,即2金>1金+1银)3.如果奖牌和类型相同,则按字母顺序子排序我正在用ruby做这件事,但我想语言并不重要。我确实找到了一个解决方案,但如果感觉必须有更优雅的方法来实现它。这是我做的:使用加权奖牌总数创建一个虚拟属性。因此,如果他们有2个金牌和1个银牌,加权总数将为“3.020100”。1金1银1铜为“3.010101”由于我们希望将奖牌数排序为最高的,因此列表按降序排
我想开始使用“Sinatra”框架进行编码,但我找不到该框架的“MVC”模式。是“MVC-Sinatra”模式或框架吗? 最佳答案 您可能想查看Padrino这是一个围绕Sinatra构建的框架,可为您的项目提供更“类似Rails”的感觉,但没有那么多隐藏的魔法。这是使用Sinatra可以做什么的一个很好的例子。虽然如果您需要开始使用这很好,但我个人建议您将它用作学习工具,以对您来说最有意义的方式使用Sinatra构建您自己的应用程序。写一些测试/期望,写一些代码,通过测试-重复:)至于ORM,你还应该结帐Sequel其中(imho
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
网站的日志分析,是seo优化不可忽视的一门功课,但网站越大,每天产生的日志就越大,大站一天都可以产生几个G的网站日志,如果光靠肉眼去分析,那可能看到猴年马月都看不完,因此借助网站日志分析工具去分析网站日志,那将会使网站日志分析工作变得更简单。下面推荐两款网站日志分析软件。第一款:逆火网站日志分析器逆火网站日志分析器是一款功能全面的网站服务器日志分析软件。通过分析网站的日志文件,不仅能够精准的知道网站的访问量、网站的访问来源,网站的广告点击,访客的地区统计,搜索引擎关键字查询等,还能够一次性分析多个网站的日志文件,让你轻松管理网站。逆火网站日志分析器下载地址:https://pan.baidu.
1.回顾.TransportServicepublicclassTransportServiceextendsAbstractLifecycleComponentTransportService:方法:1publicfinalTextendsTransportResponse>voidsendRequest(finalTransport.Connectionconnection,finalStringaction,finalTransportRequestrequest,finalTransportRequestOptionsoptions,TransportResponseHandlerT>
参考文章搭建文章gitte源码在线体验可以注册两个号来测试演示图:一.整体介绍 介绍SignalR一种通讯模型Hub(中心模型,或者叫集线器模型),调用这个模型写好的方法,去发送消息。 内容有: ①:Hub模型的方法介绍 ②:服务器端代码介绍 ③:前端vue3安装并调用后端方法 ④:聊天室样例整体流程:1、进入网站->调用连接SignalR的方法2、与好友发送消息->调用SignalR的自定义方法 前端通过,signalR内置方法.invoke() 去请求接口3、监听接受方法(渲染消息)通过new signalR.HubConnectionBuilder().on
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接