本文例子参考《STM32单片机开发实例——基于Proteus虚拟仿真与HAL/LL库》
源代码:https://github.com/LanLinnet/STM32F103R6
理解H桥电路的工作原理,结合前面几个项目学习过的定时器中断、EXTI、串口通讯等,要求通过7个按钮控制步进电动机的运行状态,包括:连续正转、连续反转、停止、加速、减速、点动正转和点动反转。
在第一节的基础上,在Proteus中添加电路如下图所示。其中我们添加了一个达林顿晶体管阵列ULN2803,一个步进电动机MOTOR-STEPPER。
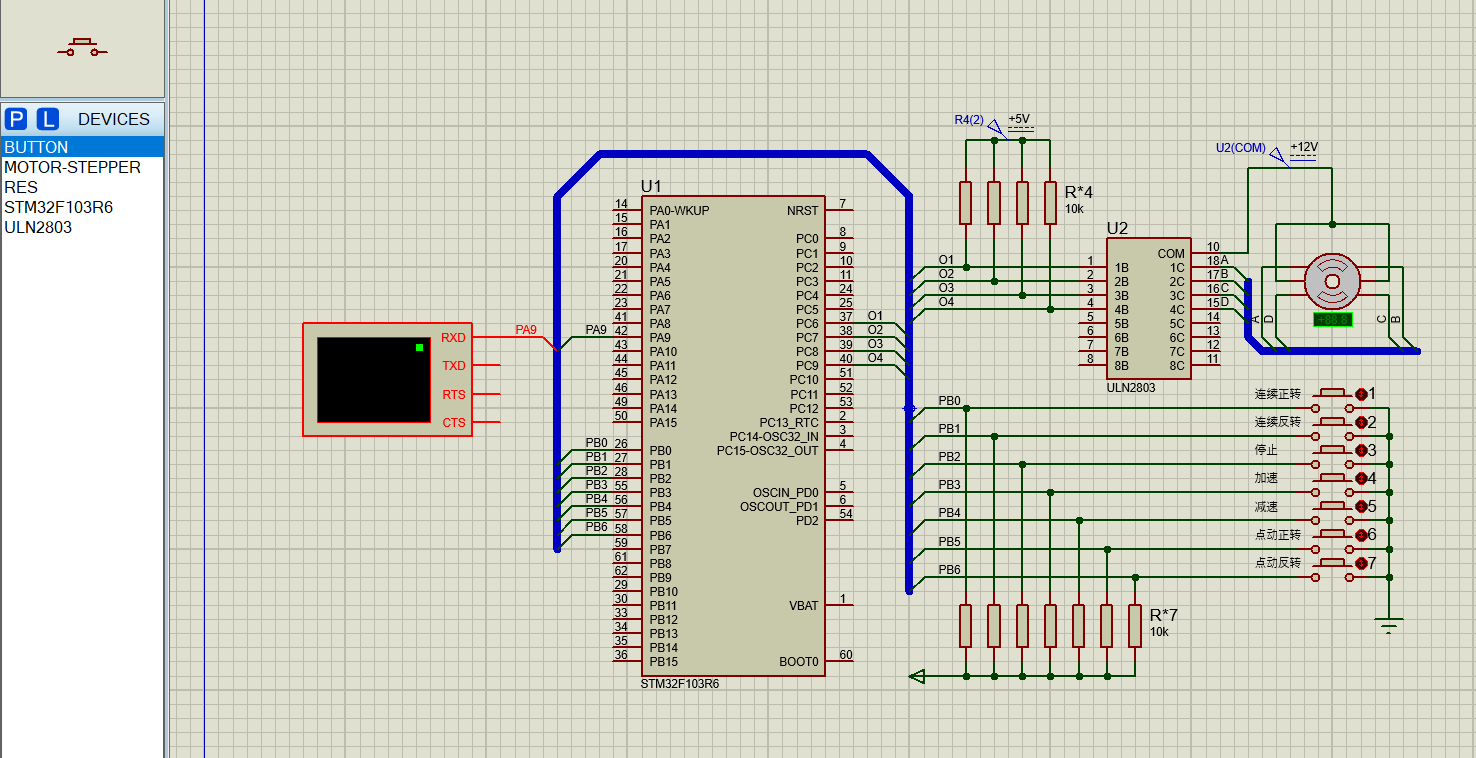
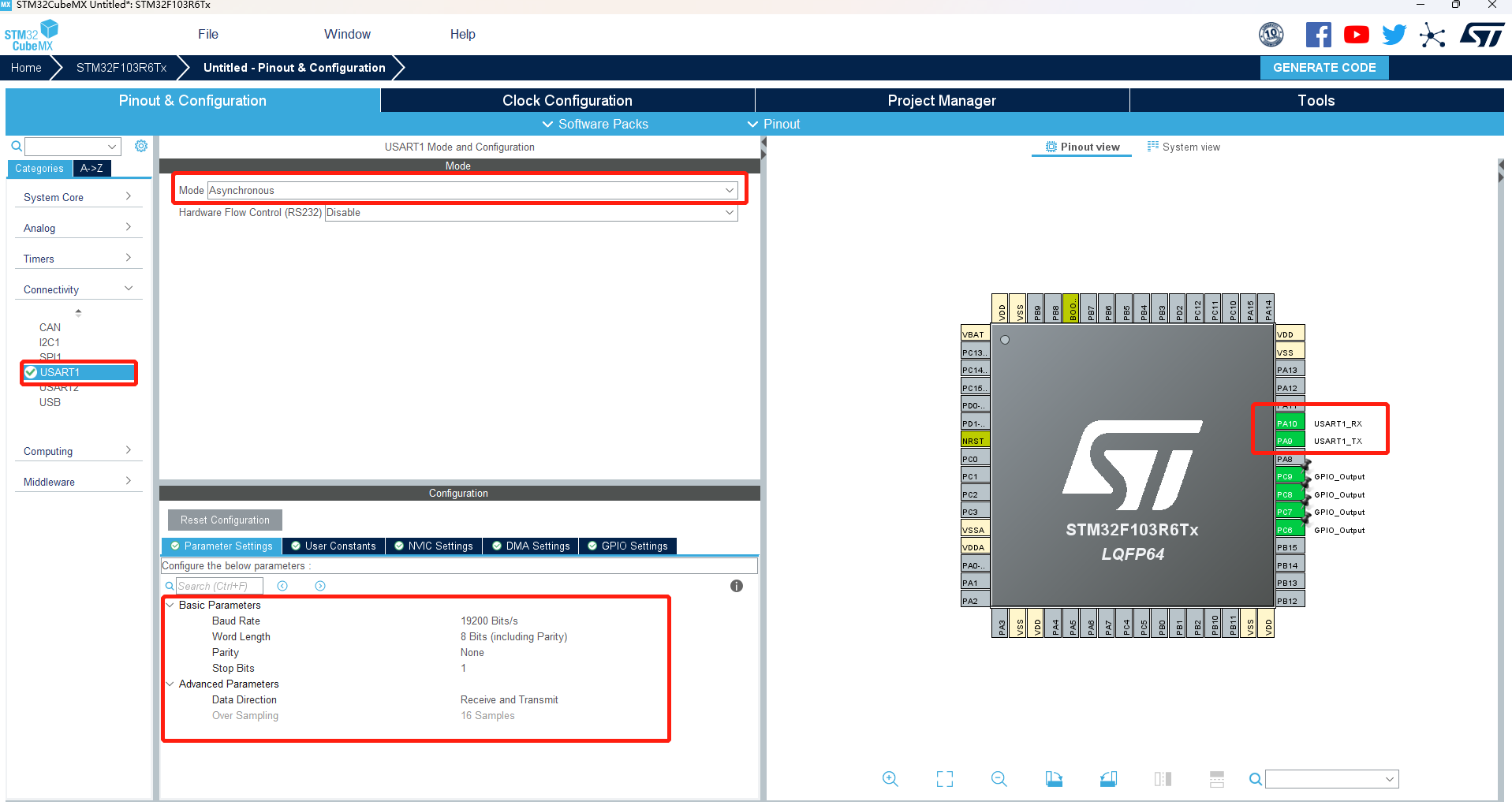
此外,我们还添加了一个虚拟仪表:虚拟终端VIRTUAL TERMINAL,将其波特率设置为19200bits/s。
达林顿晶体管阵列ULN2803:ULN2803内部具有一个8路NPN达林顿晶体管阵列,适合作为TTL、CMOS、NMOS或PMOS等低逻辑电平数字电路与继电器、步进电动机等直流高电压、大电流设备之间的接口。其引脚排序如下图所示,引脚1-8为8路输入,引脚11-18为8路输出,引脚9为GND,引脚10为公共端。

8路达林顿晶体管某1路的内部电路结构示意图如下图所示。在实际使用的时候,一般将负载一端接在公共引脚COM,将负载另一端接在输出引脚\(O_n\)(n=1,2,3...,8)。COM引脚同时连接负载高电压,输入的逻辑信号地和输出的电源地同时连接GND引脚。当输入逻辑信号为高电平时,ULN2803导通,\(O_n\)引脚接地,负载回路通路;反之,负载回路短路。
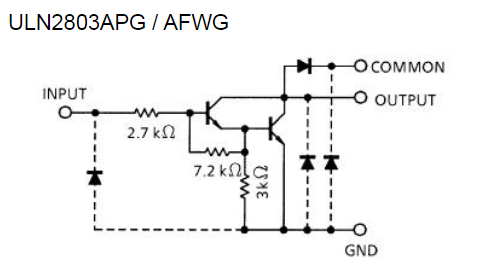
此外,由于ULN2803输入的逻辑高电平为+5V,所以STM32单片机需要选择具备“FT”特性的GPIO引脚与其连接。
步进电动机的驱动:
1)简介:步进电动机属于特种电动机,其角位移与给定的脉冲个数成正比,转速与脉冲的频率成正比。
2)引脚:本项目所使用的Proteus中的步进电动机MOTOR STEPPER是一种四相六线制的步进电动机,四相分别为A、B、C、D,可以选择四相单四拍、四相双四拍或四相单双八拍3种驱动方式。

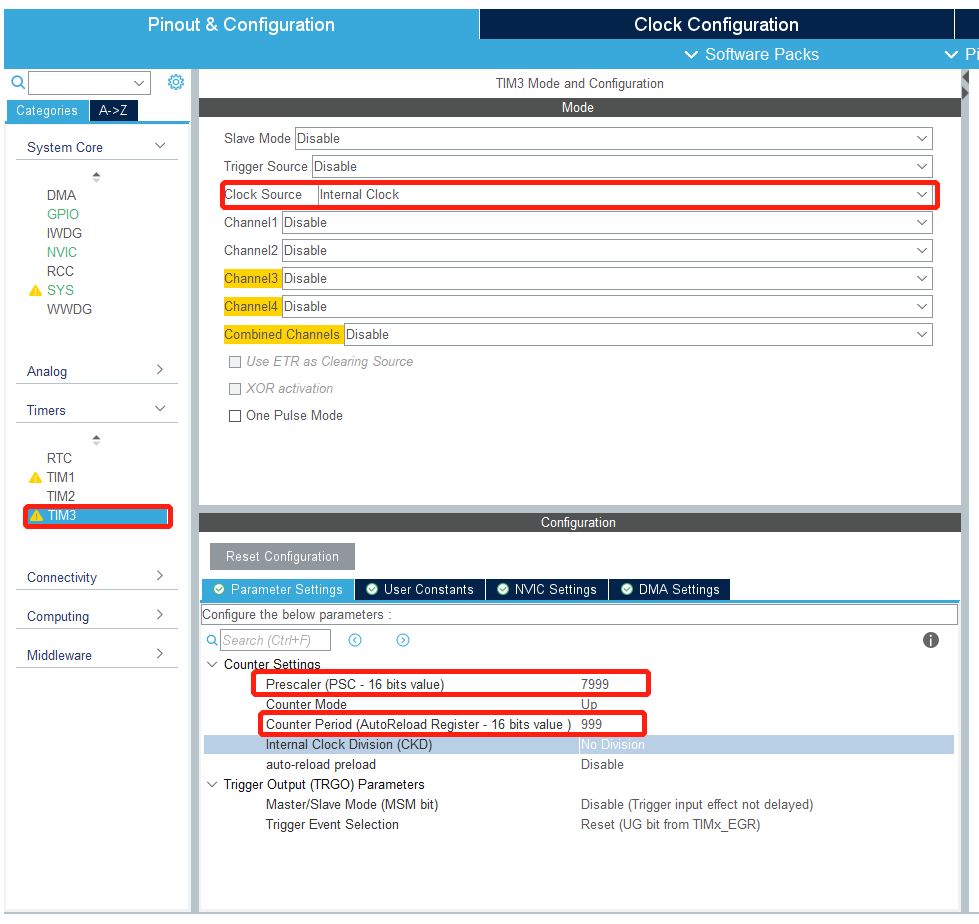
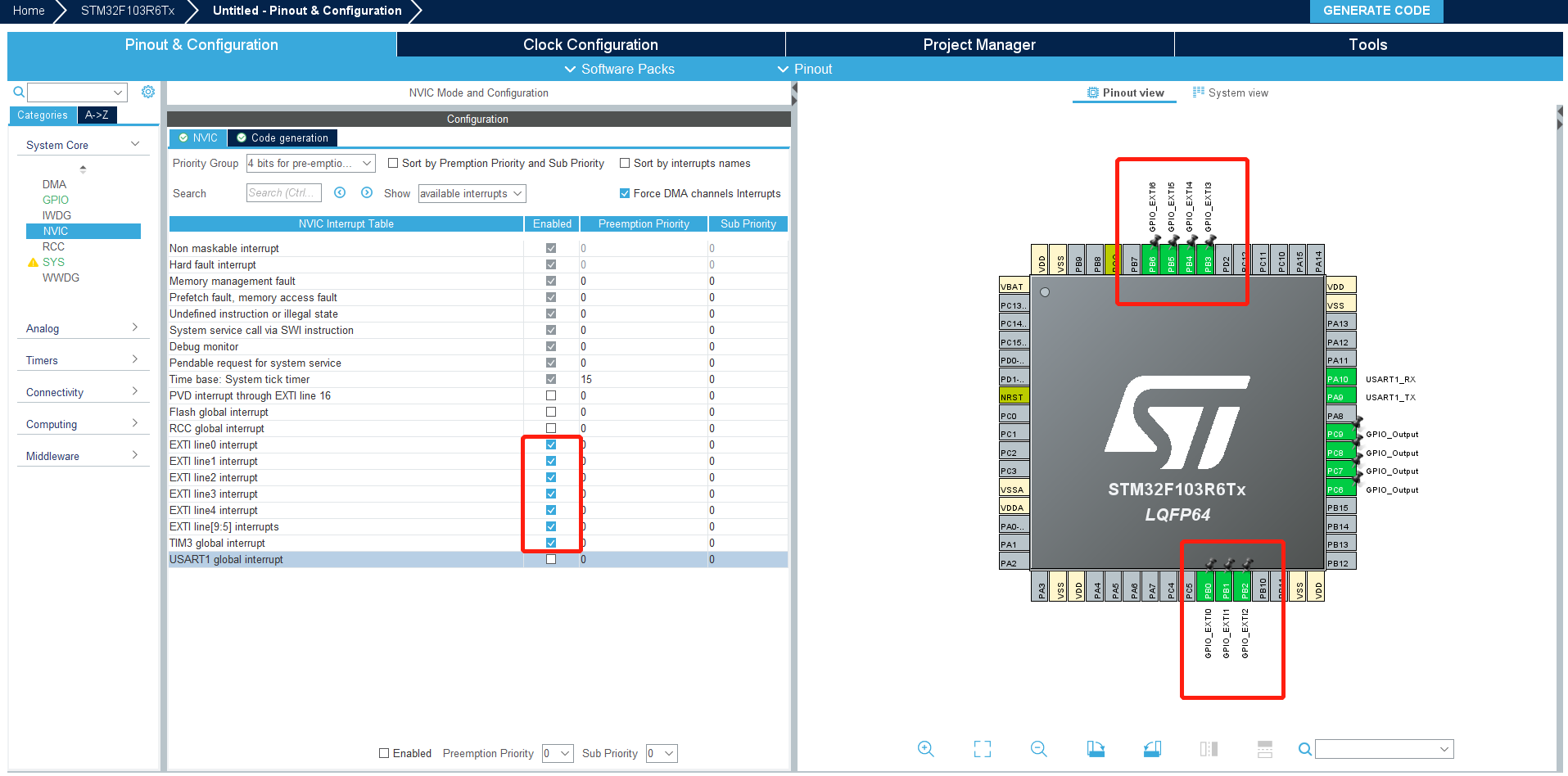
打开CubeMX,建立工程。这一项目有很多设置都与前面涉及的项目相似,若不熟悉可以进行回顾。
点击“Generator Code”生成Keil工程。
点击“Open Project”在Keil中打开工程,打开“main.c”,添加代码如下。
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h" //引入标准输入输出库头文件
/* USER CODE END Includes */
/* USER CODE BEGIN PV */
char rd = 'C'; //C表示顺时针,A表示逆时针
uint16_t arr = 49; //定时器重载值
int StepNo = 1; //步序编号,1-AB 2-BC 3-CD 4-DA
uint8_t rf = 0;
/* USER CODE END PV */
/* USER CODE BEGIN PFP */
void StepOut(uint8_t StepNo); //定义相序设置函数
/* USER CODE END PFP */
/* USER CODE BEGIN 1 */
char str[4]; //串口输出值存放数组
/* USER CODE END 1 */
/* USER CODE BEGIN 2 */
__HAL_TIM_SET_AUTORELOAD(&htim3, arr); //定时器3自动重载设定值
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1)
{
if(rf == 1)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&"Time Interval[ms]", 18, 18);
sprintf(str, "%d", arr);
HAL_UART_Transmit(&huart1, (uint8_t *)str, 3, 3);
HAL_UART_Transmit(&huart1, (uint8_t *)&"\n\r", 2, 2);
rf = 0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
/* USER CODE BEGIN 4 */
//步序设置函数
void StepOut(uint8_t StepNo)
{
if(StepNo==1) //步序1-AB
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_SET);
}
else if(StepNo==2) //步序2-BC
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_6|GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7|GPIO_PIN_8, GPIO_PIN_SET);
}
else if(StepNo==3) //步序3-CD
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_SET);
}
else if(StepNo==4) //步序4-DA
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7|GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9|GPIO_PIN_6, GPIO_PIN_SET);
}
}
//定时器3中断回调函数
void HAL_TIM_PeriodElapsedCallback (TIM_HandleTypeDef *htim)
{
if(htim==&htim3)
{
if(rd=='C') //正转
{
StepNo++;
if(StepNo>4)StepNo=1;
StepOut(StepNo);
}
else if(rd=='A') //反转
{
StepNo--;
if(StepNo<0)StepNo=4;
StepOut(StepNo);
}
}
}
//外部中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin==GPIO_PIN_0) //按键0-连续正转
{
rd='C';
HAL_TIM_Base_Start_IT(&htim3);
StepOut(StepNo);
rf=1;
}
else if(GPIO_Pin==GPIO_PIN_1) //按键1-连续反转
{
rd='A';
HAL_TIM_Base_Start_IT(&htim3);
StepOut(StepNo);
rf=1;
}
else if(GPIO_Pin==GPIO_PIN_2) //按键2-停止
{
HAL_TIM_Base_Stop(&htim3);
}
else if(GPIO_Pin==GPIO_PIN_3) //按键3-加速
{
if(arr>49)arr-=50;
__HAL_TIM_SET_AUTORELOAD(&htim3,arr);
rf=1;
}
else if(GPIO_Pin==GPIO_PIN_4) //按键4-减速
{
if(arr<999)arr+=50;
__HAL_TIM_SET_AUTORELOAD(&htim3,arr);
rf=1;
}
else if(GPIO_Pin==GPIO_PIN_5) //按键5-点动正转
{
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5)==GPIO_PIN_RESET) //检测下降沿
{
rd='C';
HAL_TIM_Base_Start_IT(&htim3);
StepOut(StepNo);
rf=1;
}
else //检测上升沿
{
HAL_TIM_Base_Stop(&htim3);
}
}
else if(GPIO_Pin==GPIO_PIN_6) //按键6-点动正转
{
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_6)==GPIO_PIN_RESET) //检测下降沿
{
rd='A';
HAL_TIM_Base_Start_IT(&htim3);
StepOut(StepNo);
rf=1;
}
else //检测上升沿
{
HAL_TIM_Base_Stop(&htim3);
}
}
}
/* USER CODE END 4 */

至此为止,STM32F103R6的项目已经全部写完,我们即将开始新的旅途。
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
提供3种Ubuntu系统安装微信的方法,在Ubuntu20.04上验证都ok。1.WineHQ7.0安装微信:ubuntu20.04安装最新版微信--可以支持微信最新版,但是适配的不是特别好;比如WeChartOCR.exe报错。2.原生微信安装:linux系统下的微信安装(ubuntu20.04)--微信适配的最好,反应最快,但是微信版本只到2.1.1,版本太老,很多功能都没有。3.深度deepin-wine6安装微信:ubuntu20.04+系统deepin-wine6安装新版微信--综合比较好,当前个人使用此种方法1个月,微信版本3.4;没什么大问题,尚可。一、WineHQ7.0安装微信
我正在尝试从使用RubyonRails的散列创建http参数,我尝试使用URI.encode_www_form(params),但这没有正确生成参数。下面是我的哈希值params['Name'.to_sym]='NiaKun'params['AddressLine1'.to_sym]='AddressOne'params['City'.to_sym]='CityName'这个方法把空格转成+,我要的是把空格转成%20我收到"Name=Nia+Kun&AddressLine1=Address+One&City=City+Name"但我需要将此空格转换为%20
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方
有道无术,术尚可求,有术无道,止于术。本系列SpringBoot版本3.0.4本系列SpringSecurity版本6.0.2本系列SpringAuthorizationServer版本1.0.2源码地址:https://gitee.com/pearl-organization/study-spring-security-demo文章目录前言1.OAuth2AuthorizationServerMetadataEndpointFilter2.OAuth2AuthorizationEndpointFilter3.OidcProviderConfigurationEndpointFilter4.N
在我的代码中,我需要使用各种算法(包括CRC32)对文件进行哈希处理。因为我还在Digest系列中使用其他加密哈希函数,所以我认为为它们维护一个一致的接口(interface)会很好。为了记录,我确实找到了digest-crc,一颗完全符合我要求的gem。问题是,Zlib是标准库的一部分,并且有一个我想重用的CRC32工作实现。此外,它是用C编写的,因此它应该提供与digest-crc相关的卓越性能,后者是纯ruby实现。实现Digest::CRC32一开始看起来非常简单:%w(digestzlib).each{|f|requiref}classDigest::CRC32一切正常: