永磁同步电机(PMSM)
PMSM,英文全称为Permanent-magnet Synchronous Motor,直译为永磁同步电机。
永磁同步电机的工作原理简单来说就是定子通交流电产生旋转磁场,转子为永磁体,定子产生的磁场带动永磁体旋转,转速为同步转速。同步电机的特点是无论是否带载,都以同步转速运行,只要在同步电机的带载范围以内,电机都将以同步转速旋转。而永磁同步电机的特点就是将转子的励磁绕组换成了永磁体。
它需要满足几个特点:
1)三相定子之间通相序互差120度的交流电压产生旋转运动的定子磁场。
2)转子采用永磁体励磁,不管其励磁材料是铝镍钴、铁氧体还是钕铁硼;不管其安装是内埋还是表贴,通过特殊的定子与转子形状设计,最终在气隙空间中呈现正弦排列的N-S磁场。
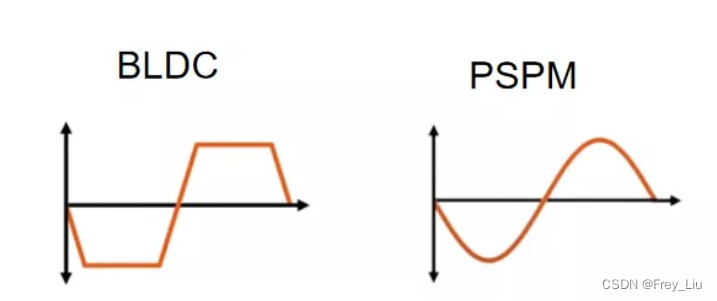
3)基于以上两点,反电势必须是正弦波,这是PMSM与BLDC(反电势梯形波)的最大区别。
任何电机控制,无非三种不同的控制目标:
但无论是哪种控制目标,无非是一个闭环还是两个闭环还是三个闭环的区别,力矩控制作为最内层的环,是必不可少的。
要控制一个电机,首先对被控对象的了解是必须的,定子三相上通过互差120度的交变电压以后,在定子铁芯上可以看到产生了旋转的磁场,在这个旋转的磁场作用下,与转子磁场产生力的作用,带动转子旋转。
电机力矩是如何产生的呢?力矩与电枢(定子)电流成正比;
电流是如何产生的呢?我们可以把电机的每一个绕组想象成一个在磁场中旋转的电阻+电感,如下面的等效电路:

假设电机开环运行,当给定电机定子三相一个互差120度的电压建立起旋转磁场以后,如果这个时候没有负载,电机会飞速的转动起来(空载),直到反电势和给定电压完全相等;此时定子绕组中的电流为仍然为0,可以将定子的旋转磁场假想(虚拟/等效)成一个绕着电机轴心旋转的磁铁,假想出来的这块磁铁的南极与转子磁铁的北极轴线相重合。
当转子上有了负载以后,根据牛顿运动定理,电机的转速必然会有一个减速的过程,这就意味着上述等效电路中的反电势降低,而在给定电压不变的情况下,剩下的那些电压就会在电阻中产生电流了。在那这一段减速的过程当中还发生了什么事情呢?因为被负载拖拽了一下,转子磁铁的轴心比虚拟出来的定子磁铁轴心要落后一个角度了,这个角度就是我们所谓的“功角”。
电机的力矩控制,就是通过一定的控制算法,去寻找一些开关管的组合来合成一个给电机定子的给定电压,这个电压抵消掉反电势后产生的电流所对应的力矩刚好与外部负载平衡。关于电机的矢量模型,互联网上可以找到各种各样的图。
电机的力矩控制当前存在的两个主要流派是磁场定向控制FOC和直接转矩控制DTC,当然这两种控制的算法从原理上说对所有的交流电机都适用,本文只是讲讲他们用于永磁同步电机控制的异同。
FOC控制理论最初于上世纪70年代由西门子的工程师提出。在上文中我们提到过可以把定子所产生的磁场虚拟成一个绕转子高速旋转磁铁。
定子磁势可分解为d轴磁势和q轴磁势,d轴磁势与转子磁势同轴,不能产生切向的力矩,但会影响永磁同步电机转子永磁体所产生的磁场;q轴与转子磁势相差90度,因而产生切向的力矩(类似两根垂直的条形磁铁所产生的相互作用力)。
FOC的控制的基本思路就是将三相静止ABC坐标系下的相关变量转换到旋转坐标系下(d,q)进行数学运算,控制改变d轴和q轴的电压达到控制d轴和q轴电流的目的。然而最终给电机三相的只能是静止坐标系下的电压,因此在控制算法中需要再次把dq轴的电压转换成ABC三相电压给驱动桥。即存在一个从物理模型 -》 数学模型 -》控制算法 -》物理模型的过程。

要实现FOC,下列输入必不可少:
下列控制模块必不可少:
下图给出了具体的控制过程。

过程如下:
DTC的出现比FOC晚了十多年,是上世纪80年代中期由德国学者Depenbrock教授提出。其基本思路是不再将定子侧的相关变量折算到转子的旋转坐标系下,放弃了矢量控制中电流解耦的控制思想 ,去掉了PI调节模块、反Clark-Park变换和SVPWM模块,转而通过检测母线电压和定子电流,直接计算出电机的磁链和转矩,并利用两个滞环比较器直接实现对定子磁链和转矩的解耦控制。(定子绕组本身就是一个传感器,直接测量感应出来的电压,定子电压直接积分就是磁通,电压就是磁场的微分,可以判断磁场的位置方向,这种方法称为直接转矩控制(DTC))

从上框图我们可看到,控制算法首先根据电机的线电流和相电压,得到在静止两相坐标轴下的电压和电流 Uα 、Uβ、 Iα、 Iβ。然后根据这四个量,对定子的磁通和力矩进行估计。同时,还要根据电机定子的电压和电流来估算当前转子的位置所在的区间。
当然如果担心软件中积分运算有累计误差导致不准确,或者转子磁通的值不准确,或者功率角的值不准确,也可以在系统中加入角度传感器,将相关参数都放到旋转坐标dq轴坐标系下后去计算。
计算得到定子磁通和扭矩值以后,与其参考值做比较并经过滞缓比较器以后,得到两个非零即1的状态量,表征当前磁和力与参考值的关系。
永磁同步电机(Permanent magnet Synchronous Motor——PMSM)和无刷直流电机(Brushless Direct Current Motor——BLDC)都属于永磁电机,转子由永磁体组成基本结构,定子安防有多相交流电绕组,都是永磁铁转子和定子的交流电产生的磁场相互作用产生电机的转矩,绕组中定子电流须与转子位置反馈同步。
PMSM电机的正弦波形,需要使用磁场定向控制 (FOC) 算法。FOC 通常用于最大限度地提高 PMSM 三相电机的效率。与 BLDC 的梯形控制器相比,PMSM的正弦控制器更为复杂,成本也更高。然而,成本的增加也带来了一些优势,如减少了电流波形中的噪声和谐波。BLDC 的主要优势是更易于控制。
因设计上和控制上的区别,PMSM和BLDC特性对比如下:
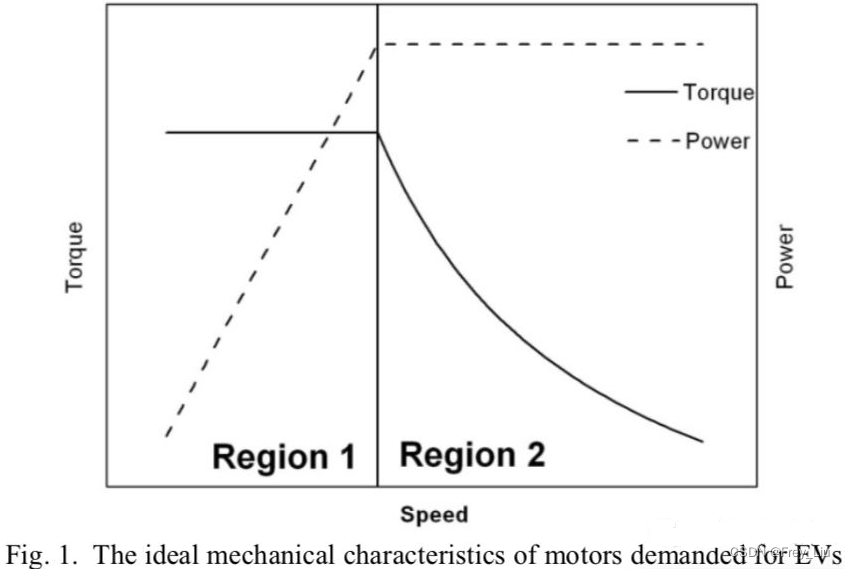
电动汽车电机的理想机械特性:
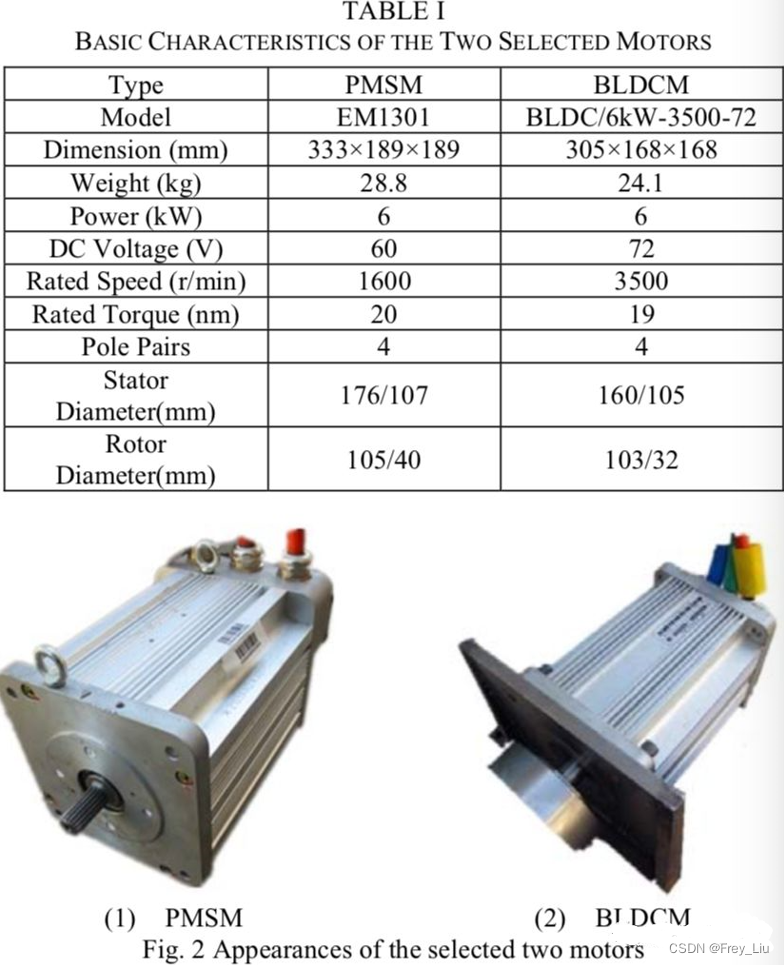
作为比较的PMSM和BLDCM:
功率和转矩特性测试结果:
 两个电机在低速和中速区有相似的功率特征,但是BLDCM转速超过3000rpm时功率下降。
两个电机在低速和中速区有相似的功率特征,但是BLDCM转速超过3000rpm时功率下降。
系统效率MAP比较:

高效率区都分布在中高速区,低速区效率下降明细。考虑一般的运行条件,PMSM续航里程更远。
电机模型:


1000rpm磁场云图:

PMSM的转子軛部和定子齿部磁密都比BLDCM低。
齿槽转矩:

BLDCM的齿槽转矩比PMSM大。
反电势波形:

BLDCM的反电势大于PMSM。
电机控制学习笔记——PMSM数学模型
怎么获取PMSM电机转子位置Offset值
永磁同步电机的FOC/ DTC
BLDC和PMSM在低速电动车应用的性能比较
永磁同步电机的直接转矩控制(一)一一一DTC仿真模型的搭建
电机控制:直接转矩控制(DTC)
DTC(Direct Torque Control)直接转矩控制
BLDC和PMSM电机的区别
文章目录一、概述简介原理模块二、配置Mysql使用版本环境要求1.操作系统2.mysql要求三、配置canal-server离线下载在线下载上传解压修改配置单机配置集群配置分库分表配置1.修改全局配置2.实例配置垂直分库水平分库3.修改group-instance.xml4.启动监听四、配置canal-adapter1修改启动配置2配置映射文件3启动ES数据同步查询所有订阅同步数据同步开关启动4.验证五、配置canal-admin一、概述简介canal是Alibaba旗下的一款开源项目,Java开发。基于数据库增量日志解析,提供增量数据订阅&消费。Git地址:https://github.co
类似的问题,但对于java,Keepingi18nresourcessynced如何保持i18nyamllocals的key同步?即,当将key添加到en.yml时,如何将它们添加到nb.yml或ru.yml?如果我在my_title:"atitle"旁边添加键my_label:"sometextinenglish"我想把它给我的其他本地人我指定,因为我不能做所有的翻译,它应该回到其他语言的英语例如en.ymlsomegroup:my_tile:"atitleinenglish"my_label:"sometextinenglish"othergroup:...我想发出命令,将整个键和
目录FIFO一.自定义同步FIFO1.1代码设计1.2Testbech1.3行为仿真***学习位宽计算函数$clog2()***$clog2()系统函数使用,可以不关注***分布式资源或者BLOCKBRAM二.异步FIFO2.1在FIFO判满的时候有两种方式:2.2异步FIFO为什么要使用格雷码2.2.1介绍格雷码2.2.2格雷码在异步FIFO中的应用2.2.2格雷码判满2.4二进制与格雷码之间的转换2.4.1二进制码转换为格雷码的方法2.4.2格雷码转换为二进制码的方法2.3实现框图2.5实现及仿真代码2.6仿真图验证2.7结论FIFO 这篇更多的是记录FIFO学习,参考了众多优秀的文章,
数据同步的方式数据同步的2大方式基于SQL查询的CDC(ChangeDataCapture):离线调度查询作业,批处理。把一张表同步到其他系统,每次通过查询去获取表中最新的数据。也就是我们说的基于SQL查询抽取;无法保障数据一致性,查的过程中有可能数据已经发生了多次变更;不保障实时性,基于离线调度存在天然的延迟;工具软件以Kettle(ApacheHop最新版)、DataX为代表,需要结合任务调度系统使用。基于日志的CDC:实时消费日志,流处理,例如MySQL的binlog日志完整记录了数据库中的变更,可以把binlog文件当作流的数据源;保障数据一致性,因为binlog文件包含了所有历史变更
目录前言一、定时器部分和按键部分二、PWM调速三、电机驱动部分三、编码器接口部分(测速)四.主函数总结推荐STM32学习课程:[6-8]编码器接口测速_哔哩哔哩_bilibili[6-8]编码器接口测速是STM32入门教程-2022持续更新中的第20集视频,该合集共计30集,视频收藏或关注UP主,及时了解更多相关视频内容。https://www.bilibili.com/video/BV1th411z7sn/?p=20&spm_id_from=pageDriver&vd_source=ed36b2700bbc2bac7746c270bc391540OLED显示屏代码
最近玩步进电机时候,发现步进电机驱动种类多;A4988,drv8825,tb6600,lv8731……;tb6600驱动电流可达4A,1600细分,十分强大,但是体积大,用在平衡车上不太合适。drv8825加散热器驱动电流可达2.5A,32细分,还不错。芯片介绍这里的介绍只介绍其引脚连接。如图是它的说明书中对引脚的解释在这里把它翻译成中文。 为了方便大家使用,说明书还给出了一种典型的连接方式 这样初始化好之后,将AOUT1、AOUT2、BOUT1、BOUT2分别连接到步进电机对应信号线,AOUT1与AOUT2同相,BOUT1与BOUT2同相。判断步进电机信号线是否同相的一个方法是将其中两条接
IGH主站通信测试linuxcnc配置基础机器人控制LinuxCNC与EtherCAT介绍&&PDO&SDO,搭建环境步骤需要配置IGH主站的查看这篇文章linux系统学习笔记7——一次性安装igh-ethercat主站CSP模式DC同步方式preemrt实时补丁直接上代码,这部分是直接控制使用csp模式控制一个从站运动使能后直接运动,10s,每秒607a(目标位置)增加100.注意:急停按下ESC代码分为两部分,一个是通信线程主要负责和伺服通信,使能伺服,读取和写入寄存器值。第二个是操作线程,负责修改位置的值,和监控按键。使用此代码,首先根据手册1.修改PDO条目,要和自己的伺服一致2.修改
电动势,是导体内电子运动的必要条件,也是电子运动趋势的一种表现,因而具有一定的方向性。电动势的方向,规定为从电源的负极,经过电源内部指向电源的正极,即与电源两端电压的方向相反。反电动势,是指由反抗电流发生改变的趋势而产生电动势。反电动势一般出现在电磁线圈中,如继电器线圈、电磁阀、接触器线圈、电动机、电感等。对于电动机产品,定子部分是电能的输入端,而转子部分则是电机做功的输出端;通过定子部分输入的电能,一部分用于转子部分做功,另一部分则会消耗于线路内阻,以及其他损耗。转子部分产生的反电动势,即电动机做功的要素。反电动势消耗了电路中的电能,但它并不是一种“损耗”,与反电动势对应的那部分电能,将转
目录l298n模块详解l298n芯片简介 在嵌入式领域中l298n属于最常用的电机驱动模块,该模块稳定,耐用,操作简单备受广大电子爱好者的喜爱,今天小编结合自己开发的经验来给初学者门聊聊如何使用这款模块及芯片的用法l298n模块详解如图所示,模块左右两侧的2P的端子是接入电机的,左右两端分别可以接入一个直流电机。由于直流电机不分正负所以怎样接都是可以的。中间3P的端子分别接12V,GND,5V。黑色排针部分左右两端的跳帽插上代表使能,l298n有两个通道,所以有两个使能跳帽。中间的四个排针是逻辑输入,左边两个为一组,右边两个为另一组,真值表如下图所示下图附带了l298n模块的原理图,想自己di
为什么新的JavaScript模块request同步?它应该只用于作业队列吗?有什么方法可以在ArangoDB中发出异步http(s)请求吗? 最佳答案 完全披露:我是ArangoDB开发团队的一员,主要从事Foxx和所有JavaScript方面的工作。我也是写org/arangodb/request的人模块。ArangoDB是一个不同于Node.js的环境,尽管有许多相似之处(例如使用V8JavaScript引擎)。与Node.js(或浏览器)不同,ArangoDB使用基于线程的并发模型并且没有事件循环。然而,线程并没有在Java