PS2采用SPI通信协议
250Khz ~ 4us
数据不稳定可以适当增加频率
下面是数据意义对照表,其中idle表示空闲
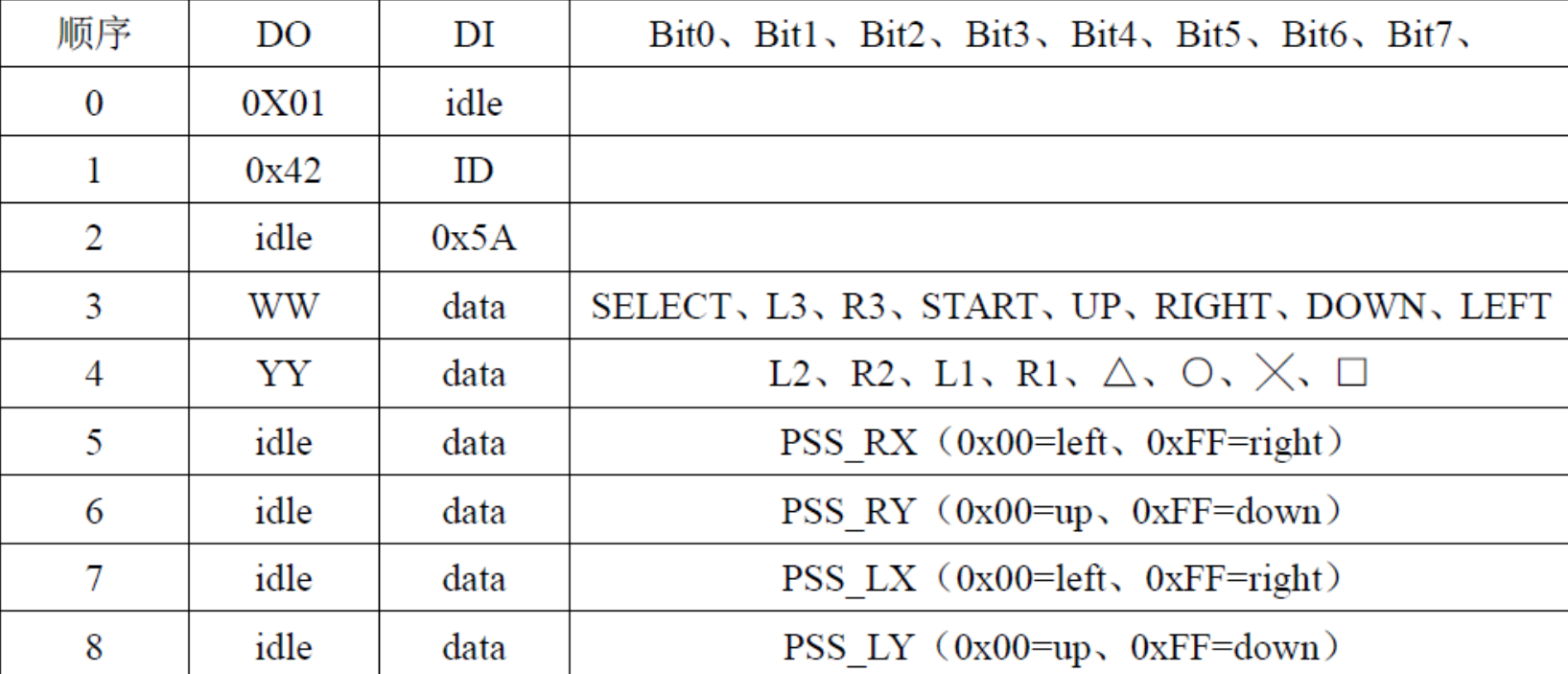
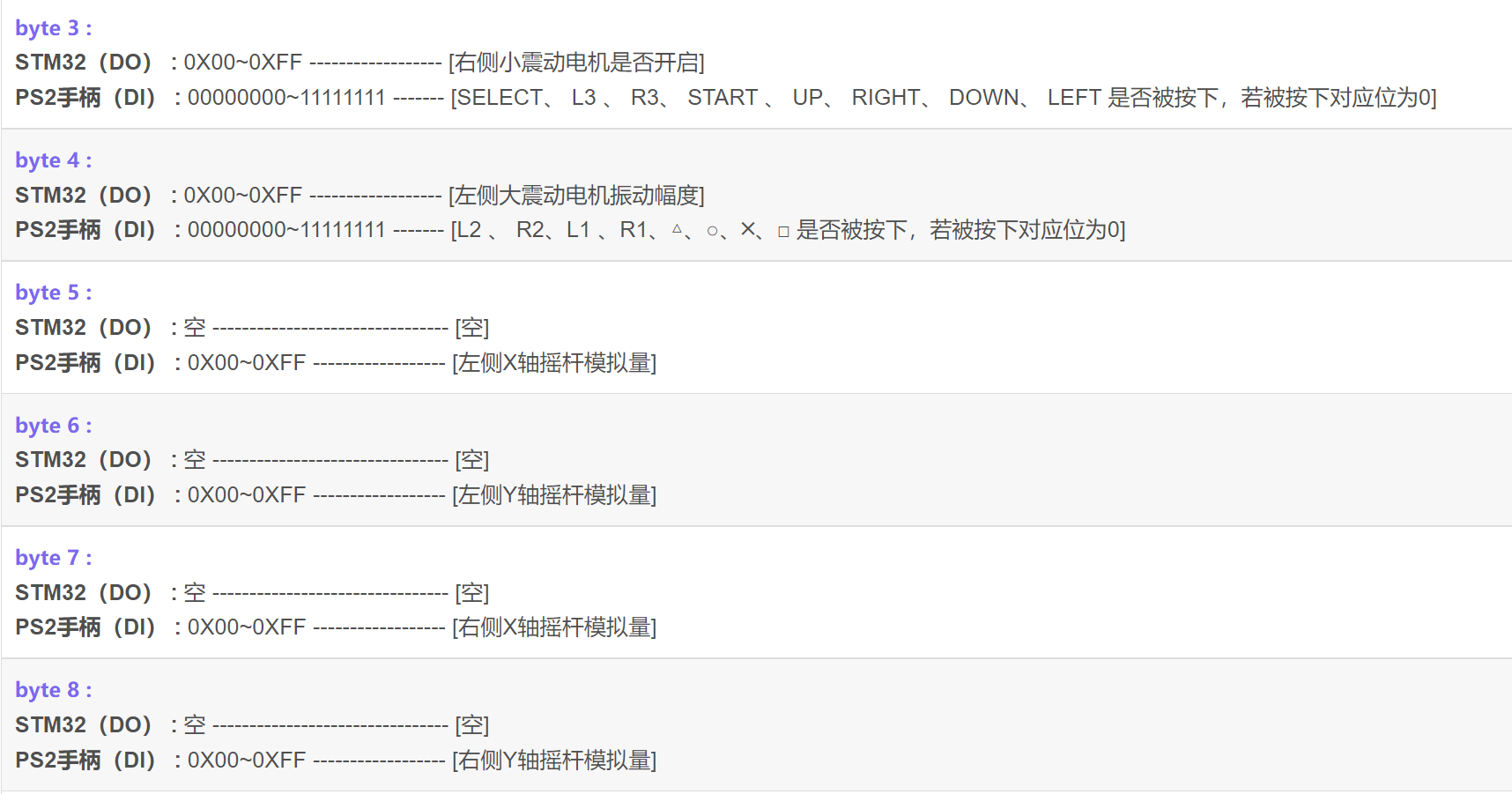
顺序3~8的解析
初始化GPIO接口
void PS2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//使能PORTB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
//配置 PB13 PB14 PB15 为 通用推挽输出,速度为50mMhz
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
//配置 PB12 为 下拉输入模式
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPD;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12;
GPIO_Init(GPIOB, &GPIO_InitStruct);
}
发送数据给PS2的同时接收PS2的数据
#define DI PBin(12) //PB12 输入
#define DO_H PBout(13)=1 //命令位高
#define DO_L PBout(13)=0 //命令位低
#define CLK_H PBout(15)=1 //时钟拉高
#define CLK_L PBout(15)=0 //时钟拉低
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
void PS2_Cmd(u8 CMD)
{
volatile u16 ref=0x01;
//重置数据
Data[1] = 0;
for(ref=0x01;ref<0x0100;ref<<=1)
{
//检测是否有指令需要发送,有指令则拉高电平
if(ref&CMD) DO_H;
else DO_L;
//先拉高时钟线电平,然后降低,然后再拉高,从而同步发送与接收数据
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
//若接受到数据,则在对应数据位写1
if(DI)
Data[1] = ref|Data[1];
}
//发送完八位数据之后延时一段时间
delay_us(16);
}
读取手柄数据
#define DI PBin(12) //PB12 输入
#define DO_H PBout(13)=1 //命令位高
#define DO_L PBout(13)=0 //命令位低
#define CS_H PBout(14)=1 //CS拉高
#define CS_L PBout(14)=0 //CS拉低
#define CLK_H PBout(15)=1 //时钟拉高
#define CLK_L PBout(15)=0 //时钟拉低
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
//用于存储两个命令,分别是开始命令和请求数据命令
u8 Comd[2]={0x01,0x42};
void PS2_ReadData(void)
{
volatile u8 byte=0;
volatile u16 ref=0x01;
//片选线拉低电平以选中接收器
CS_L;
//发送请求命令和请求数据命令
PS2_Cmd(Comd[0]);
PS2_Cmd(Comd[1]);
//依次读取数组Data的后七个位置
for(byte=2;byte<9;byte++)
{
//将数据写入Data的后七个位置
for(ref=0x01;ref<0x100;ref<<=1)
{
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[byte] = ref|Data[byte];
}
//每发送完八位数据之后延时一段时间
delay_us(16);
}
//拉高片选线电平结束通信
CS_H;
}
判断是否为红灯模式,return0则为红灯模式
红灯的ID为“0x73”,绿灯的ID为“0x41”
#define CS_H PBout(14)=1 //CS拉高
#define CS_L PBout(14)=0 //CS拉低
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
//用于存储两个命令,分别是开始命令和请求数据命令
u8 Comd[2]={0x01,0x42};
u8 PS2_RedLight(void)
{
CS_L;
PS2_Cmd(Comd[0]);
PS2_Cmd(Comd[1]);
CS_H;
//判断是否是红灯模式的ID
if( Data[1] == 0X73) return 0 ;
else return 1;
}
重置Data数组的所有位
void PS2_ClearData()
{
u8 a;
for(a=0;a<9;a++)
Data[a]=0x00;
}
返回按键的对应键值 ,键值用按键名的宏去定义
按键按下为0,未按下为1
//用于储存按键值
u16 Handkey;
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
u16 MASK[]={
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK
};
//PS2按键键值的宏定义
#define PSB_SELECT 1
#define PSB_L3 2
#define PSB_R3 3
#define PSB_START 4
#define PSB_PAD_UP 5
#define PSB_PAD_RIGHT 6
#define PSB_PAD_DOWN 7
#define PSB_PAD_LEFT 8
#define PSB_L2 9
#define PSB_R2 10
#define PSB_L1 11
#define PSB_R1 12
#define PSB_GREEN 13
#define PSB_RED 14
#define PSB_BLUE 15
#define PSB_PINK 16
#define PSB_TRIANGLE 13
#define PSB_CIRCLE 14
#define PSB_CROSS 15
#define PSB_SQUARE 16
u8 PS2_DataKey()
{
u8 index;
PS2_ClearData();
PS2_ReadData();
//将所有按键对应的位整合成一个16bit的数据
Handkey=(Data[4]<<8)|Data[3];
for(index=0;index<16;index++)
{
//遍历这个16bit的数据,并返回被按下按键的值,按键的值被宏定义
if((Handkey&(1<<(MASK[index]-1)))==0)
return index+1;
}
return 0;
}
返回摇杆的状态数值
u8 PS2_AnologData(u8 button)
{
return Data[button];
}
不同的button的值所读取的数据:
返回的摇杆的模拟值在0~255之间
x方向最左边为0,最右边为255
y方向最上方为0,最右边为255
手柄配置初始化
void PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); //进入配置模式
PS2_TurnOnAnalogMode(); //“红绿灯”配置模式,并选择是否保存
//PS2_VibrationMode(); //开启震动模式
PS2_ExitConfing(); //完成并保存配置
}
设置发送模式
void PS2_TurnOnAnalogMode(void)
{
CS_L;
PS2_Cmd(0x01); //设置成0x01为红灯模式,0x00为绿灯模式
PS2_Cmd(0x44);
PS2_Cmd(0X00);
PS2_Cmd(0x01);
PS2_Cmd(0x03); //Ox03锁存设置,即不可通过按键“MODE”设置模式。
//0xEE不锁存软件设置,可通过按键“MODE”设置模式。
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
我想在一个没有Sass引擎的类中使用Sass颜色函数。我已经在项目中使用了sassgem,所以我认为搭载会像以下一样简单:classRectangleincludeSass::Script::FunctionsdefcolorSass::Script::Color.new([0x82,0x39,0x06])enddefrender#hamlengineexecutedwithcontextofself#sothatwithintemlateicouldcall#%stop{offset:'0%',stop:{color:lighten(color)}}endend更新:参见上面的#re
我正在尝试用ruby中的gsub函数替换字符串中的某些单词,但有时效果很好,在某些情况下会出现此错误?这种格式有什么问题吗NoMethodError(undefinedmethod`gsub!'fornil:NilClass):模型.rbclassTest"replacethisID1",WAY=>"replacethisID2andID3",DELTA=>"replacethisID4"}end另一个模型.rbclassCheck 最佳答案 啊,我找到了!gsub!是一个非常奇怪的方法。首先,它替换了字符串,所以它实际上修改了
我有一些代码在几个不同的位置之一运行:作为具有调试输出的命令行工具,作为不接受任何输出的更大程序的一部分,以及在Rails环境中。有时我需要根据代码的位置对代码进行细微的更改,我意识到以下样式似乎可行:print"Testingnestedfunctionsdefined\n"CLI=trueifCLIdeftest_printprint"CommandLineVersion\n"endelsedeftest_printprint"ReleaseVersion\n"endendtest_print()这导致:TestingnestedfunctionsdefinedCommandLin
如何在Ruby中按名称传递函数?(我使用Ruby才几个小时,所以我还在想办法。)nums=[1,2,3,4]#Thisworks,butismoreverbosethanI'dlikenums.eachdo|i|putsiend#InJS,Icouldjustdosomethinglike:#nums.forEach(console.log)#InF#,itwouldbesomethinglike:#List.iternums(printf"%A")#InRuby,IwishIcoulddosomethinglike:nums.eachputs在Ruby中能不能做到类似的简洁?我可以只
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
注意:本文主要掌握DCN自研无线产品的基本配置方法和注意事项,能够进行一般的项目实施、调试与运维AP基本配置命令AP登录用户名和密码均为:adminAP默认IP地址为:192.168.1.10AP默认情况下DHCP开启AP静态地址配置:setmanagementstatic-ip192.168.10.1AP开启/关闭DHCP功能:setmanagementdhcp-statusup/downAP设置默认网关:setstatic-ip-routegeteway192.168.10.254查看AP基本信息:getsystemgetmanagementgetmanaged-apgetrouteAP配
我需要一个通过输入字符串进行计算的方法,像这样function="(a/b)*100"a=25b=50function.something>>50有什么方法吗? 最佳答案 您可以使用instance_eval:function="(a/b)*100"a=25.0b=50instance_evalfunction#=>50.0请注意,使用eval本质上是不安全的,尤其是当您使用外部输入时,因为它可能包含注入(inject)的恶意代码。另请注意,a设置为25.0而不是25,因为如果它是整数a/b将导致0(整数)。