本文例子参考《STM32单片机开发实例——基于Proteus虚拟仿真与HAL/LL库》
源代码:https://github.com/LanLinnet/STM32F103R6
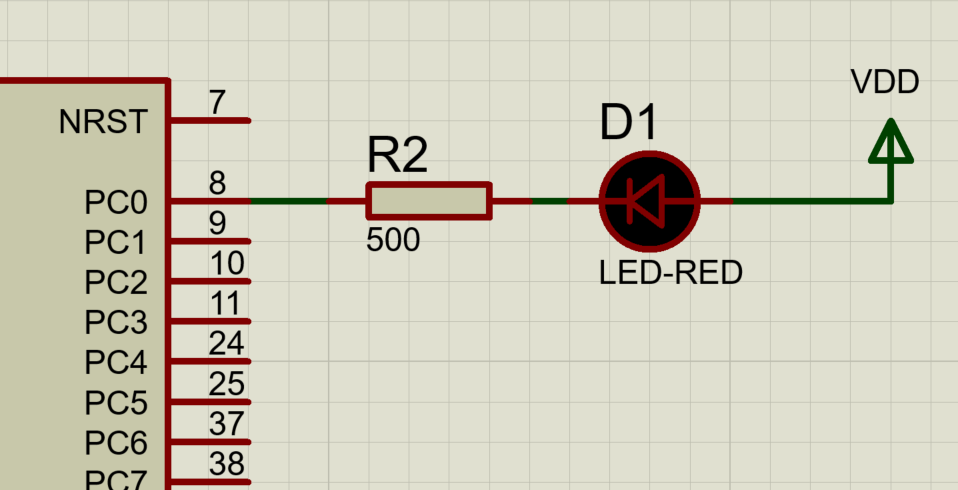
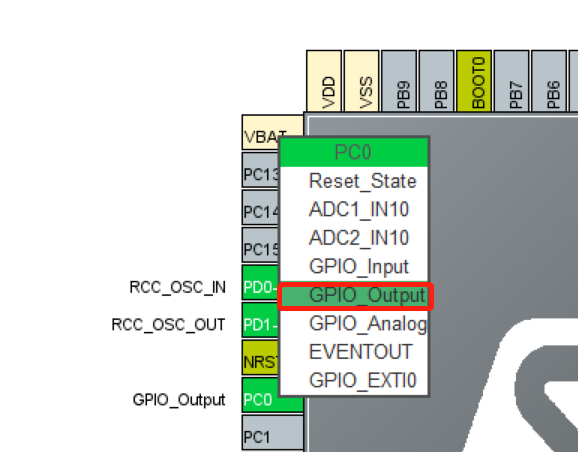
STM32单片机控制单个LED灯亮灭,在PC0引脚控制LED灯以1s为周期闪烁。
/* USER CODE BEGIN */和/* USER CODE END */之间,这样我们如果后面在CubeMX中修改一些配置并重新“Generator Code”时就不会影响我们自己写的代码了。

HAL_GPIO_TogglePin()函数实现管脚电平反转。
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_0); //翻转PC0输出状态
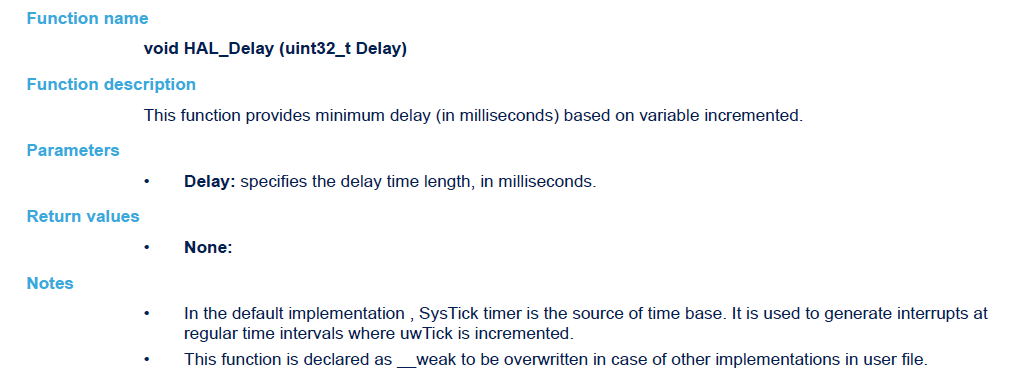
HAL_Delay(500); //延时500ms

//1.验证返回状态码是否是200pm.test("Statuscodeis200",function(){pm.response.to.have.status(200);});//2.验证返回body内是否含有某个值pm.test("Bodymatchesstring",function(){pm.expect(pm.response.text()).to.include("string_you_want_to_search");});//3.验证某个返回值是否是100pm.test("Yourtestname",function(){varjsonData=pm.response.json
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
1.在Python3中,下列关于数学运算结果正确的是:(B)a=10b=3print(a//b)print(a%b)print(a/b)A.3,3,3.3333...B.3,1,3.3333...C.3.3333...,3.3333...,3D.3.3333...,1,3.3333...解析: 在Python中,//表示地板除(向下取整),%表示取余,/表示除(Python2向下取整返回3)2.如下程序Python2会打印多少个数:(D)k=1000whilek>1: print(k)k=k/2A.1000 B.10C.11D.9解析: 按照题意每次循环K/2,直到K值小于等
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
目录一、ESP32简单介绍二、ESP32Wi-Fi模块介绍三、ESP32Wi-Fi编程模型四、ESP32Wi-Fi事件处理流程 五、ESP32Wi-Fi开发环境六、ESP32Wi-Fi具体代码七、ESP32Wi-Fi代码解读6.1主程序app_main7.2自定义代码wifi_init_sta()八、ESP32Wi-Fi连接验证8.1测试方法8.2服务器模拟工具sscom58.3测试代码8.4测试结果前言为了开发一款亚马逊物联网产品,开始入手ESP32模块。为了能够记录自己的学习过程,特记录如下操作过程。一、ESP32简单介绍ESP32是一套Wi-Fi(2.4GHz)和蓝牙(4.2)双模解决方
有道无术,术尚可求,有术无道,止于术。本系列SpringBoot版本3.0.4本系列SpringSecurity版本6.0.2本系列SpringAuthorizationServer版本1.0.2源码地址:https://gitee.com/pearl-organization/study-spring-security-demo文章目录前言1.OAuth2AuthorizationServerMetadataEndpointFilter2.OAuth2AuthorizationEndpointFilter3.OidcProviderConfigurationEndpointFilter4.N
在我的代码中,我需要使用各种算法(包括CRC32)对文件进行哈希处理。因为我还在Digest系列中使用其他加密哈希函数,所以我认为为它们维护一个一致的接口(interface)会很好。为了记录,我确实找到了digest-crc,一颗完全符合我要求的gem。问题是,Zlib是标准库的一部分,并且有一个我想重用的CRC32工作实现。此外,它是用C编写的,因此它应该提供与digest-crc相关的卓越性能,后者是纯ruby实现。实现Digest::CRC32一开始看起来非常简单:%w(digestzlib).each{|f|requiref}classDigest::CRC32一切正常:
我正在尝试在我的机器上安装win32-apigem,但在构建native扩展时我遇到了一些问题:$geminstallwin32-api--no-ri--rdocTemporarilyenhancingPATHtoincludeDevKit...Buildingnativeextensions.Thiscouldtakeawhile...C:\Programs\dev_kit\bin\make.exe:***Couldn'treservespaceforcygwin'sheap,Win32error0ERROR:Errorinstallingwin32-api:ERROR:Failed