目录
https://github.com/Unity-Technologies/Unity-Robotics-Hub 快速链接
https://github.com/Unity-Technologies/ROS-TCP-Endpoint 快速链接
a. 用于从ROS发送/接收消息的ROS TCP Connector和用于在Unity场景中添加传入和传出消息的可视化的Visualizations Package
https://github.com/Unity-Technologies/ROS-TCP-Connector 快速链接
b. 导入URDF到Unity(好像Unity自带,但重新本地导入了一遍)
https://github.com/Unity-Technologies/URDF-Importer快速链接
https://docs.unity3d.com/Manual/upm-ui-local.html快速链接
https://plastichub.unity.cn/unity-tech-cn/Unity-Robotics-Hub快速链接
————————————————————————————————————————————
采用本地路径添加的方法
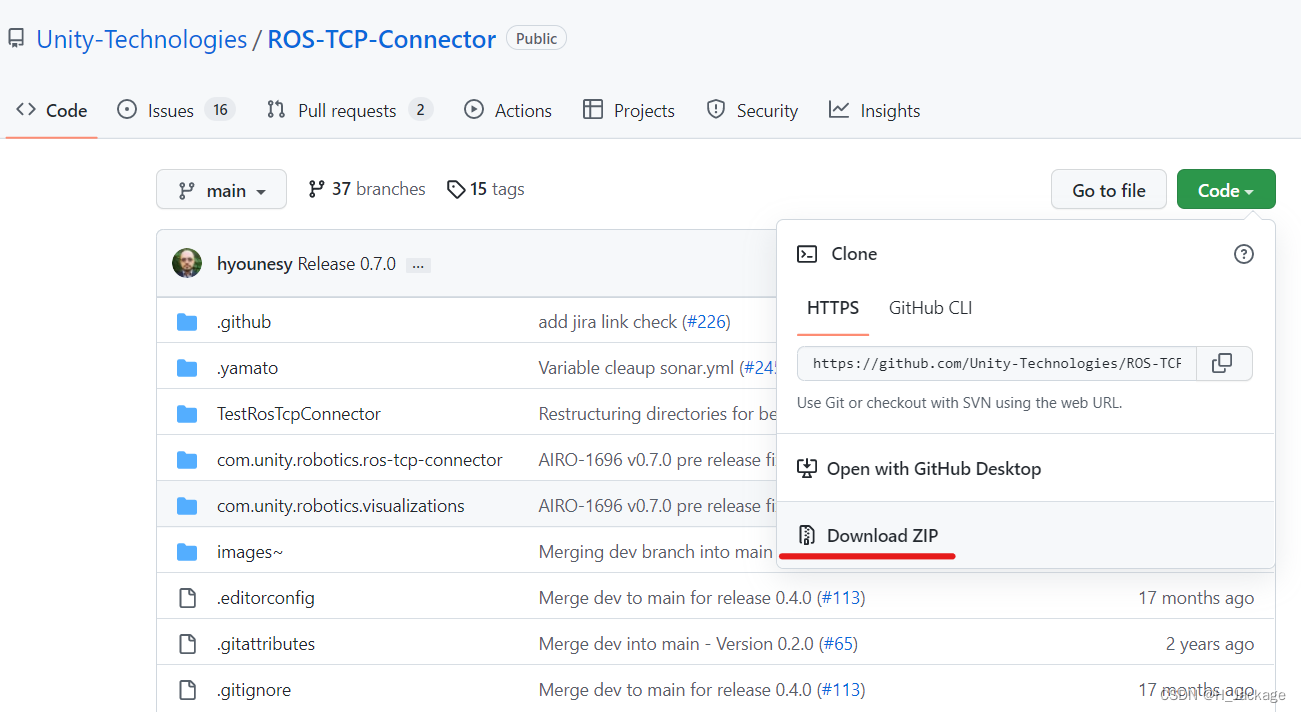
https://github.com/Unity-Technologies/ROS-TCP-Connector快速链接
下载zip文件后解压缩到自己所放置的文件路径
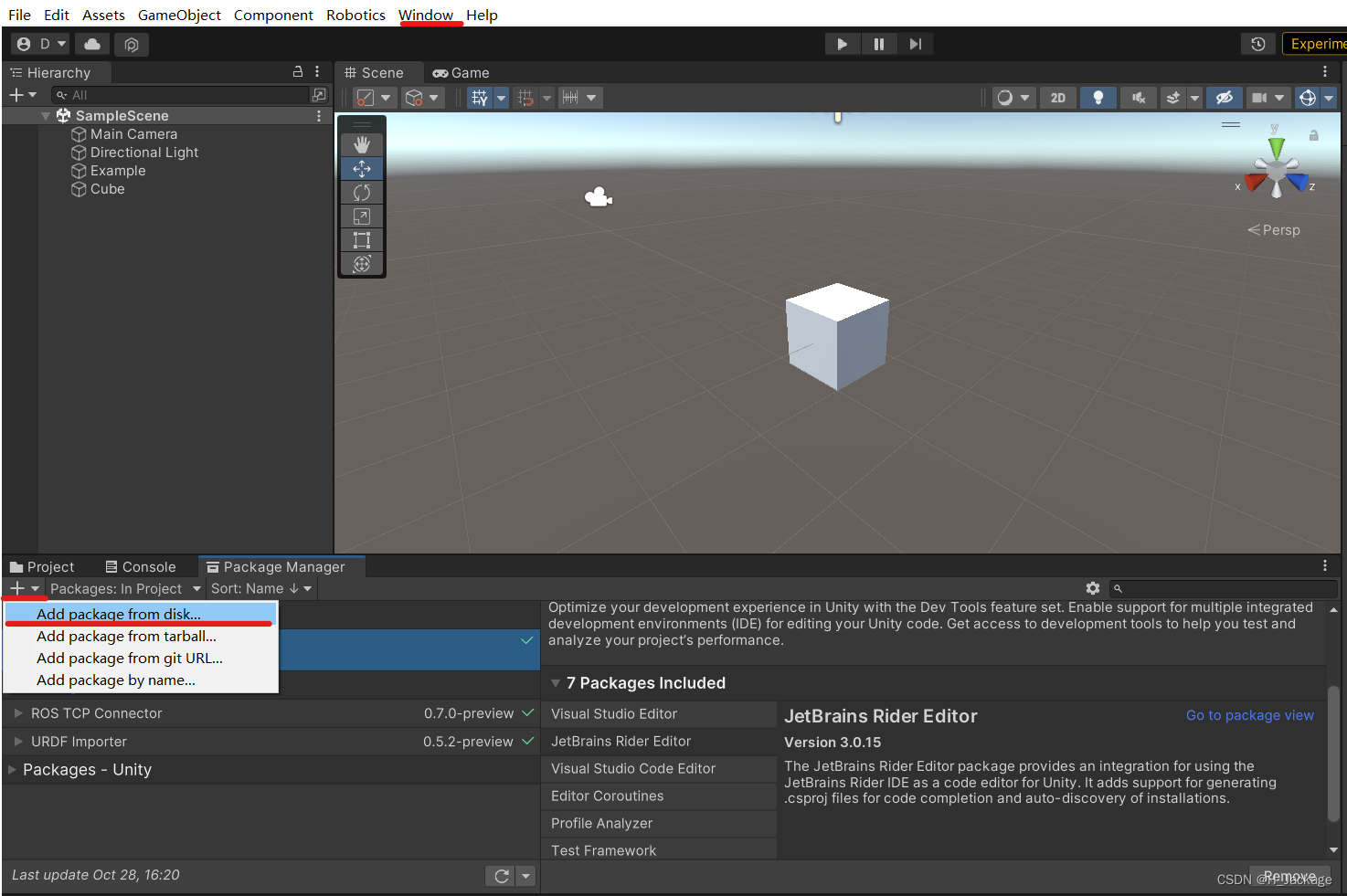
新建一个项目,“Window” ——“Package Manager ” —— “+”—— “Add package from disk…”
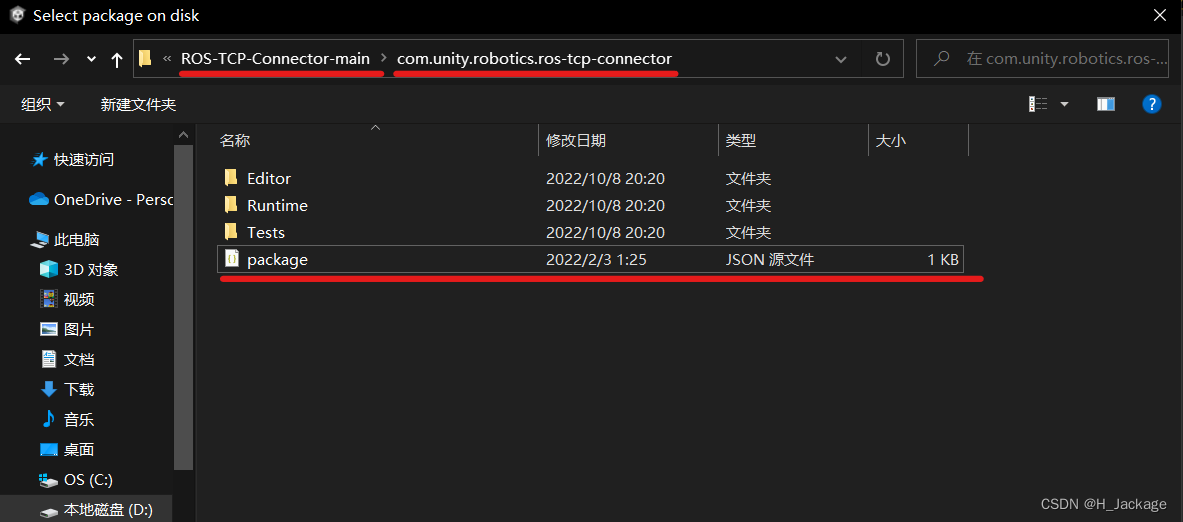
然后,选择自己下载到的本地路径,找到package的JSON源文件,点击打开(添加)
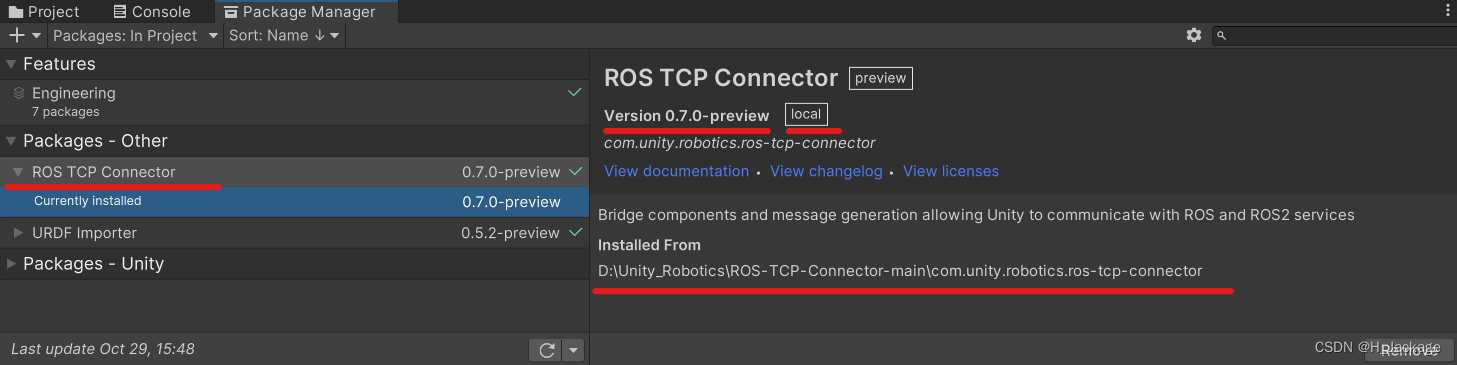
在“Package Manager ”会看到添加成功,里面包括版本、路径等信息。
采用本地路径添加的方法
https://github.com/Unity-Technologies/URDF-Importer快速链接
下载zip文件后解压缩到自己所放置的文件路径
“Window” ——“Package Manager ” —— “+”—— “Add package from disk…”
然后,选择自己下载到的本地路径,找到package的JSON源文件,点击打开(添加)
方法同上。
网址:https://plastichub.unity.cn/unity-tech-cn/Unity-Robotics-Hub/src/branch/main…/tutorials/pick_and_place/README.md
快速链接
翻译:
ROS提供消息传递、包管理、底层设备控制和硬件抽象等服务。
Unity Robotics Hub能够支持导入URDF文件,并在ROS和Unity之间发送和接收消息。
本教程将介绍将ROS与Unity集成所需的步骤,从安装Unity编辑器到使用导入的URDF创建场景,到使用MoveIt轨迹规划完成带有已知姿势的拾取和放置任务。
网址:https://github.com/Unity-Technologies/Robotics-Object-Pose-Estimation
快速链接
网址:https://github.com/Unity-Technologies/articulations-robot-demo
快速链接
由于里面有详细的教程,因此按照教程跑一遍就可以了。这里只记录个人遇到的一些问题。
因为历程中用到了开源的机械臂模型,因此,要用合适的版本才能打开。
Unity 2020.3: 2020.3.10f1 or later
Unity 2021.1: 2021.1.8f1 or later
Unity 2021.2: 2021.2.a16 or later
一开始自己从头弄的一个场景一直走到Part 3,结果在最后,ROS不能实现对Unity机械臂的路径规划和抓取,终端出现报错
[ERROR] [1668429397.373772594]: RRTConnect: Unable to sample any valid states for goal tree
后来换了场景重新再走一遍历程才成功。
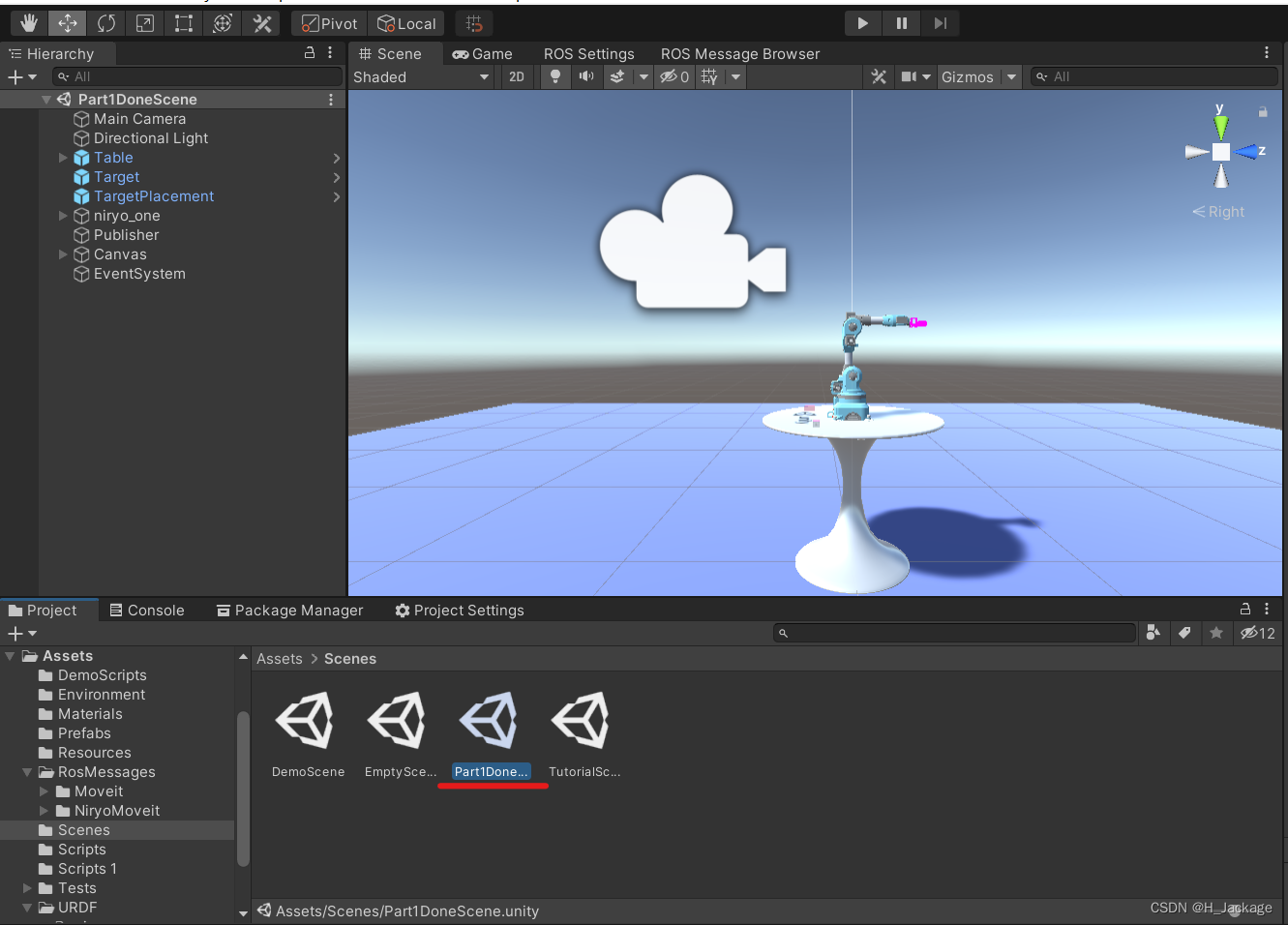
因此在Part 1里,导入了Projects以后
如图,得选择到该场景才适合接着进行。
解决办法可以根据教程进行补救,原教程很详细地说了。
我这里用了最直接的方法,把他们一个一个模块拆分下载再粘贴回去。
第一个:moveit_msgs
https://github.com/ros-planning/moveit_msgs快速链接
第二个:niryo_one_ros
https://github.com/NiryoRobotics/niryo_one_ros快速链接
第三个:ROS-TCP-Endpoint
https://github.com/Unity-Technologies/ROS-TCP-Endpoint快速链接
以上三个都是在Unity-Robotics-Hub/tutorials/pick_and_place/ROS/src/路径下
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
目录1.AdmobSDK下载地址2.将下载好的unityPackagesdk导入到unity里编辑 3.解析依赖到项目中
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
写在之前Shader变体、Shader属性定义技巧、自定义材质面板,这三个知识点任何一个单拿出来都是一套知识体系,不能一概而论,本文章目的在于将学习和实际工作中遇见的问题进行总结,类似于网络笔记之用,方便后续回顾查看,如有以偏概全、不祥不尽之处,还望海涵。1、Shader变体先看一段代码......Properties{ [KeywordEnum(on,off)]USL_USE_COL("IsUseColorMixTex?",int)=0 [Toggle(IS_RED_ON)]_IsRed("IsRed?",int)=0}......//中间省略,后续会有完整代码 #pragmamulti_c
三分钟集成Tap防沉迷SDK(Unity版)一、SDK介绍基于国家对上线所有游戏必须增加防沉迷功能的政策下,TapTap推出防沉迷SDK,供游戏开发者进行接入;允许未成年用户在周五、六、日以及法定节假日晚上8:00-9:00进行游戏,防沉谜时间段进入游戏会弹窗进行提示!开发环境要求:Unity2019.4或更高版本iOS10或更高版本Android5.0(APIlevel21)或更高版本🔗Unity集成Demo参考链接🔗UnityTapSDK功能体验APK下载链接二、集成前准备1.创建应用进入开发者后台,按照提示开始创建应用;2.开通服务在使用TDS实名认证和防沉迷服务之前,需要在上面创建的应
写在前面前两天学习并整理的大气散射基础知识:【Unity大气渲染】关于单次大气散射的理论知识,收获了很多,但不得不承认的是,这其实已经是最早的、90年代的非常古老的方法了,后来也出现了一些优化性的计算思路和方法。因此,我打算先不急着跟各种教程在Unity中实现大气散射,而是再花时间来看看最近的游戏是如何去实现大气渲染的:06.游戏中地形大气和云的渲染(下)|GAMES104-现代游戏引擎:从入门到实践接下来就跟着GAMES104讲地形大气和云渲染的部分学习并做简单的记录,涉及到之前没提到的Mie散射也只选择直接截图PPT的方式记录啦!毕竟对于做作品来说,之后实现出来才是重要的~当然,May佬的
我正在使用devise登录omniauth,authid。当用户登录时,我得到user_info:name:RiccardoTacconilast_name:Tacconiemail:email@gmail.comfirst_name:Riccardouid:https://www.google.com/accounts/o8/id?id=xxxxxxxxxprovider:google_apps我找到了一个插件:http://stakeventures.com/articles/2009/10/06/portable-contacts-in-ruby获取Google通讯录。我只需要使
所以我看到unity支持c#、JS和Boo。我可以学习其中一个,但我想制作一个“编译器”或类似的东西,让我可以编写ruby代码并输出JS代码或制作一个可以被Unity编译器读取的层。这有可能吗?我愿意在这方面投入很多时间并且有相当多的经验。 最佳答案 如果您的问题实际上是“我如何将Ruby编译为JavaScript”,那么这更容易回答:Opal:RubytoJavaScriptcompiler但是,学习其中一种受支持的语言会更好。当运行的是用另一种语言解释的代码时,很难调试“您的”代码。
1.Scenes游戏场景文件夹用于放置unity的场景文件 2.Plugins插件文件夹用于放置unity的依赖文件,例如dll 3.Scripts脚本文件夹用于放置unity的c#脚本文件 4.Resources游戏资源文件夹用于放置unity的各种游戏资源,比如images,prefabs,同时只有放到Resources文件夹的游戏资源才能使用Resource.load(资源路径不加后缀)加载到游戏内存中进行使用 5.EditorUnity编辑器扩展脚本文件夹usingUnityEditor;这个名称空间就是Unity编辑器的名称空间这个名称空间提供了扩展Unity编辑器的各种类 【你所有