推荐阅读
大家好,我是佛系工程师☆恬静的小魔龙☆,不定时更新Unity开发技巧,觉得有用记得一键三连哦。
最近,有小伙伴再整串口通信,问我有没有写好的串口代码,我一瞅我最近写的都在19年了。
比如:
2017-12-04 写的【Unity3D软硬件】Unity3D 与串口的通信程序的开发,软件硬件结合
2019-09-20 写的【Unity3D软硬件】Unity3d与串口通信程序的开发
实在是有段时间没有搞软硬件通信了,那么这篇文章就总结一下如何让Unity3D与串口的通信。
要想完美的完成一件事件,首先需要在脑子里将思路进行整理,确定自己的思路。
先说串口通信。
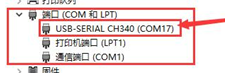
串口通信,首先要扫描那些端口是可用的,只有端口可用才能正常的发送指令。
扫描完端口,获得可用的端口列表,如下图所示:
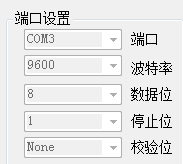
打开串口需要端口号、波特率、数据位、停止位、校验位,如下图所示:
打开完串口,之后就是向串口发送信息,发送信息就是串口的API就可以了。
发送信息,肯定就有接收信息,接收信息可以使用线程不停的接收信息,也可以使用回调委托接收。
最后,断开串口。
总结一下就是:
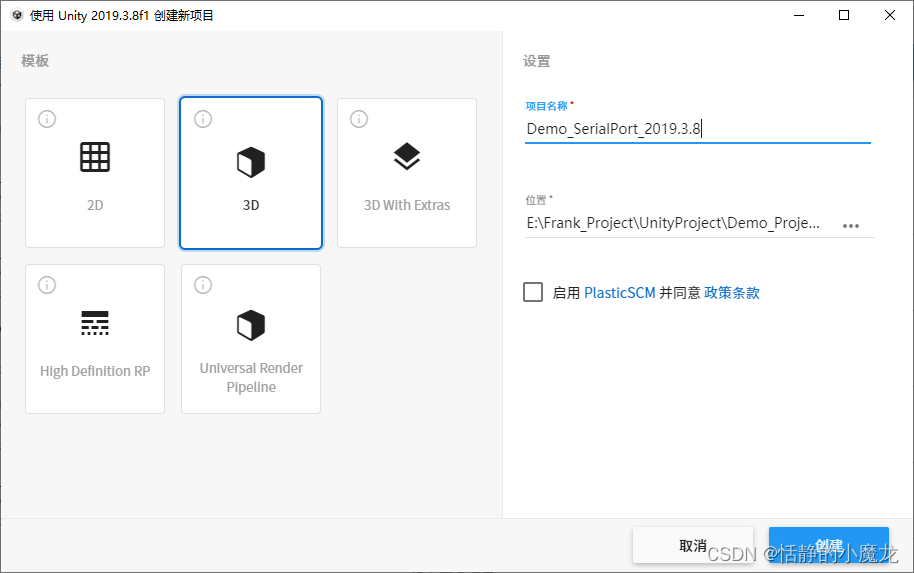
新建项目,使用版本Unity 2019.3.8f1,模板就用3D就好啦,命名为Demo_SerialProt_2019.3.8:
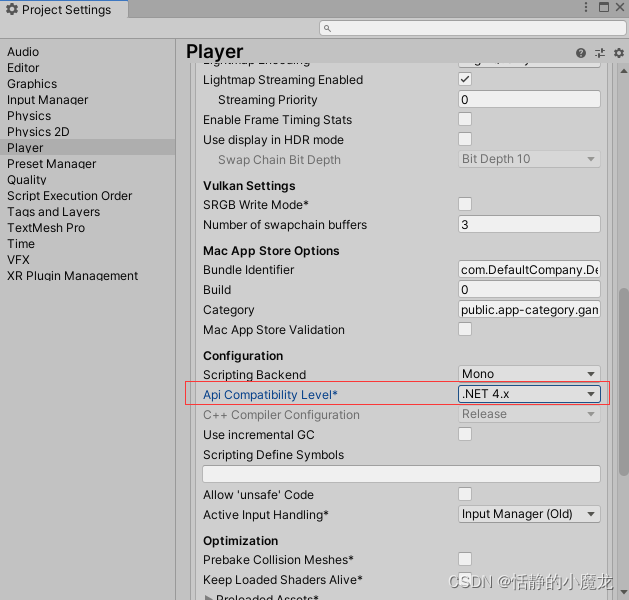
首先,引入命名空间using System.IO.Ports;,如果显示命名空间“System.IO”中不存在类型或命名空间名"Ports",缺少程序集引用错误:

可以在Project Settings面板中,将Api Compatibility Level设置为.NET 4.x:
编译完成就可以了。
第一种:使用SerialPort类自带的GetPortNames的方法获取端口。
//使用API扫描
private string[] ScanPorts_API()
{
string[] portList = SerialPort.GetPortNames();
return portList;
}
第二种:获取注册表中的端口信息的方法获取端口。
//使用注册表信息扫描
private string[] ScanPorts_Regedit()
{
RegistryKey keyCom = Registry.LocalMachine.OpenSubKey("Hardware\\DeviceMap\\SerialComm");
string[] SubKeys = keyCom.GetValueNames();
string[] portList = new string[SubKeys.Length];
for (int i = 0; i < SubKeys.Length; i++)
{
portList[i] = (string)keyCom.GetValue(SubKeys[i]);
}
return portList;
}
第三种:试错的方法获取有效的端口。
//试错方式扫描
private string[] ScanPorts_TryFail()
{
List<string> tempPost = new List<string>();
bool mark = false;
for (int i = 0; i < 10; i++)
{
try
{
SerialPort sp = new SerialPort("COM" + (i + 1).ToString());
sp.Open();
sp.Close();
tempPost.Add("COM" + (i + 1).ToString());
mark = true;
}
catch (System.Exception)
{
continue;
}
}
if (mark)
{
string[] portList = tempPost.ToArray();
return portList;
}
else
{
return null;
}
}
推荐使用一、二中方法,第三种方法只能说是鬼点子,循环打开COM1-COM10端口:
打开串口:
/// <summary>
/// 打开串口
/// </summary>
/// <param name="_portName">端口号</param>
/// <param name="_baudRate">波特率</param>
/// <param name="_parity">校验位</param>
/// <param name="dataBits">数据位</param>
/// <param name="_stopbits">停止位</param>
private void OpenSerialPort(string _portName, int _baudRate, Parity _parity, int dataBits, StopBits _stopbits)
{
try
{
if (!sp.IsOpen)
{
sp = new SerialPort(_portName, _baudRate, _parity, dataBits, _stopbits);//绑定端口
sp.Open();
}
}
catch (Exception e)
{
sp = new SerialPort();
Debug.Log(e);
}
}
对打开串口可能出现的问题进行了规避,比如说打开串口失败,就新建一个串口对象。
串口不在打开的状态,才去打开串口。
关闭串口:
/// <summary>
/// 关闭串口
/// </summary>
private void CloseSerialPort()
{
sp.Close();
}
很简单,就不多说了。
发送数据封装了两个函数,一个是发送string类型数据,一个是发送byte[]数据:
/// <summary>
/// 发送数据
/// </summary>
/// <param name="_info">string数据</param>
private void SendData(string _info)
{
try
{
if (sp.IsOpen)
{
sp.WriteLine(_info);
}
else
{
sp.Open();
sp.WriteLine(_info);
}
}
catch (Exception ex)
{
Debug.Log(ex);
}
}
/// <summary>
/// 发送数据
/// </summary>
/// <param name="send">byte数据</param>
/// <param name="offSet">起始位</param>
/// <param name="count">byte长度</param>
private void SendData(byte[] send, int offSet, int count)
{
try
{
if (sp.IsOpen)
{
sp.Write(send, offSet, count);
}
else
{
sp.Open();
sp.Write(send, offSet, count);
}
}
catch (Exception ex)
{
Debug.Log(ex);
}
}
接收数据有两种方式,一种是使用委托,一种是使用线程,下面分开讲解。
委托绑定回调函数,进行数据接收:
/// <summary>
/// 打开串口
/// </summary>
/// <param name="_portName">端口号</param>
/// <param name="_baudRate">波特率</param>
/// <param name="_parity">校验位</param>
/// <param name="dataBits">数据位</param>
/// <param name="_stopbits">停止位</param>
private void OpenSerialPort(string _portName, int _baudRate, Parity _parity, int dataBits, StopBits _stopbits)
{
try
{
if (!sp.IsOpen)
{
sp = new SerialPort(_portName, _baudRate, _parity, dataBits, _stopbits);//绑定端口
sp.Open();
//使用委托
sp.DataReceived += DataReceived;
}
}
catch (Exception ex)
{
sp = new SerialPort();
Debug.Log(ex);
}
}
/// <summary>
/// 接收数据 回调函数
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
private void DataReceived(object sender, SerialDataReceivedEventArgs e)
{
byte[] ReDatas = new byte[sp.BytesToRead];
sp.Read(ReDatas, 0, ReDatas.Length);//读取数据
DataProcessing(ReDatas);//数据处理
}
/// <summary>
/// 数据处理
/// </summary>
/// <param name="data">字节数组</param>
public void DataProcessing(byte[] data)
{
StringBuilder sb = new StringBuilder();
for (int i = 0; i < data.Length; i++)
{
sb.AppendFormat("{0:x2}" + "", data[i]);
}
Debug.Log(sb.ToString());
}
使用线程:
/// <summary>
/// 打开串口
/// </summary>
/// <param name="_portName">端口号</param>
/// <param name="_baudRate">波特率</param>
/// <param name="_parity">校验位</param>
/// <param name="dataBits">数据位</param>
/// <param name="_stopbits">停止位</param>
private void OpenSerialPort(string _portName, int _baudRate, Parity _parity, int dataBits, StopBits _stopbits)
{
try
{
if (!sp.IsOpen)
{
sp = new SerialPort(_portName, _baudRate, _parity, dataBits, _stopbits);//绑定端口
sp.Open();
//使用线程
Thread thread = new Thread(new ThreadStart(DataReceived));
thread.Start();
}
}
catch (Exception ex)
{
sp = new SerialPort();
Debug.Log(ex);
}
}
/// <summary>
/// 接收数据 线程
/// </summary>
private void DataReceived()
{
while (true)
{
if (sp.IsOpen)
{
int count = sp.BytesToRead;
if (count > 0)
{
byte[] readBuffer = new byte[count];
try
{
sp.Read(readBuffer, 0, count);
DataProcessing(readBuffer);//数据处理
}
catch (Exception ex)
{
Debug.Log(ex.Message);
}
}
}
Thread.Sleep(10);
}
}
推荐使用线程,因为Unity3D不支持SerialDataReceivedEventHandler,收数据的回调不会触发。
整体代码如下所示:
using Microsoft.Win32;
using System;
using System.Collections;
using System.Collections.Generic;
using System.IO.Ports;
using System.Text;
using System.Threading;
using UnityEngine;
public class PortManager
{
private SerialPort sp;
#region 扫描端口
//使用API扫描
public string[] ScanPorts_API()
{
string[] portList = SerialPort.GetPortNames();
return portList;
}
//使用注册表信息扫描
public string[] ScanPorts_Regedit()
{
RegistryKey keyCom = Registry.LocalMachine.OpenSubKey("Hardware\\DeviceMap\\SerialComm");
string[] SubKeys = keyCom.GetValueNames();
string[] portList = new string[SubKeys.Length];
for (int i = 0; i < SubKeys.Length; i++)
{
portList[i] = (string)keyCom.GetValue(SubKeys[i]);
}
return portList;
}
//试错方式扫描
public string[] ScanPorts_TryFail()
{
List<string> tempPost = new List<string>();
bool mark = false;
for (int i = 0; i < 10; i++)
{
try
{
SerialPort sp = new SerialPort("COM" + (i + 1).ToString());
sp.Open();
sp.Close();
tempPost.Add("COM" + (i + 1).ToString());
mark = true;
}
catch (System.Exception)
{
continue;
}
}
if (mark)
{
string[] portList = tempPost.ToArray();
return portList;
}
else
{
return null;
}
}
#endregion
#region 打开串口/关闭串口
/// <summary>
/// 打开串口
/// </summary>
/// <param name="_portName">端口号</param>
/// <param name="_baudRate">波特率</param>
/// <param name="_parity">校验位</param>
/// <param name="dataBits">数据位</param>
/// <param name="_stopbits">停止位</param>
public void OpenSerialPort(string _portName, int _baudRate, Parity _parity, int dataBits, StopBits _stopbits)
{
try
{
sp = new SerialPort(_portName, _baudRate, _parity, dataBits, _stopbits);//绑定端口
sp.Open();
//使用委托
//sp.DataReceived += DataReceived;
//使用线程
Thread thread = new Thread(new ThreadStart(DataReceived));
thread.Start();
}
catch (Exception ex)
{
sp = new SerialPort();
Debug.Log(ex);
}
}
/// <summary>
/// 关闭串口
/// </summary>
public void CloseSerialPort()
{
sp.Close();
}
#endregion
#region 发送数据
/// <summary>
/// 发送数据
/// </summary>
/// <param name="_info">string数据</param>
public void SendData(string _info)
{
try
{
if (sp.IsOpen)
{
sp.WriteLine(_info);
}
else
{
sp.Open();
sp.WriteLine(_info);
}
}
catch (Exception ex)
{
Debug.Log(ex);
}
}
/// <summary>
/// 发送数据
/// </summary>
/// <param name="send">byte数据</param>
/// <param name="offSet">起始位</param>
/// <param name="count">byte长度</param>
public void SendData(byte[] send, int offSet, int count)
{
try
{
if (sp.IsOpen)
{
sp.Write(send, offSet, count);
}
else
{
sp.Open();
sp.Write(send, offSet, count);
}
}
catch (Exception ex)
{
Debug.Log(ex);
}
}
#endregion
#region 接收数据
/// <summary>
/// 接收数据 回调函数
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
public void DataReceived(object sender, SerialDataReceivedEventArgs e)
{
byte[] ReDatas = new byte[sp.BytesToRead];
sp.Read(ReDatas, 0, ReDatas.Length);//读取数据
DataProcessing(ReDatas);//数据处理
}
/// <summary>
/// 接收数据 线程
/// </summary>
public void DataReceived()
{
while (true)
{
if (sp.IsOpen)
{
int count = sp.BytesToRead;
if (count > 0)
{
byte[] readBuffer = new byte[count];
try
{
sp.Read(readBuffer, 0, count);
DataProcessing(readBuffer);//数据处理
}
catch (Exception ex)
{
Debug.Log(ex.Message);
}
}
}
Thread.Sleep(10);
}
}
/// <summary>
/// 数据处理
/// </summary>
/// <param name="data">字节数组</param>
public void DataProcessing(byte[] data)
{
StringBuilder sb = new StringBuilder();
for (int i = 0; i < data.Length; i++)
{
sb.AppendFormat("{0:x2}" + "", data[i]);
}
Debug.Log(sb.ToString());
}
#endregion
}
因为,我没有串口硬件,就推荐一款比较好用的软件VSPD:
https://download.csdn.net/download/q764424567/82748610
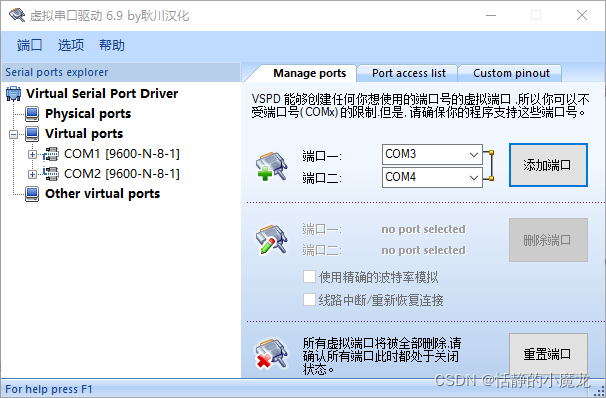
打开虚拟串口工具,新建两个串口:
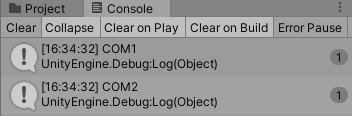
在Unity中新建脚本,去扫描串口:
using System.IO.Ports;
using UnityEngine;
public class TestPort : MonoBehaviour
{
PortManager portManager;
void Start()
{
portManager = new PortManager();
string[] portArray = portManager.ScanPorts_TryFail();//使用试错函数,可以解决COM被占用问题
foreach (string port in portArray)
{
Debug.Log(port);
}
}
}
PortManager类就是上一节编写代码的名称,运行如下图所示:
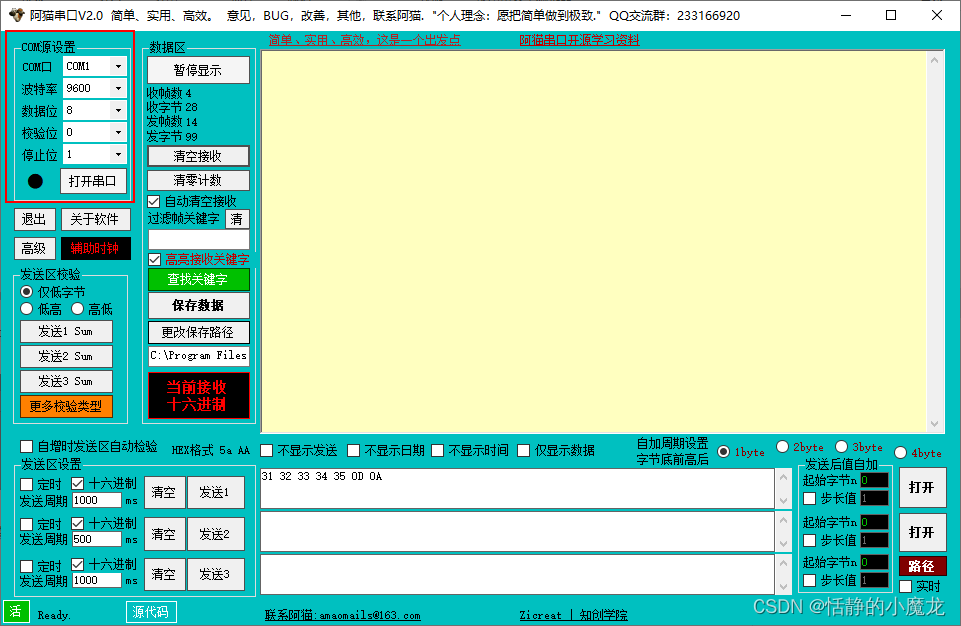
然后,打开串口调试工具,打开串口:
修改代码:
using System.IO.Ports;
using UnityEngine;
public class TestPort : MonoBehaviour
{
PortManager portManager;
void Start()
{
portManager = new PortManager();
string[] portArray = portManager.ScanPorts_TryFail();//使用试错函数,可以解决COM被占用问题
portManager.OpenSerialPort(portArray[0], 9600, Parity.None, 8, StopBits.None);
portManager.SendData("12345");
}
}
运行程序,就可以让Unity3D与串口进行数据通信了:
我打算为ruby脚本创建一个安装程序,但我希望能够确保机器安装了RVM。有没有一种方法可以完全离线安装RVM并且不引人注目(通过不引人注目,就像创建一个可以做所有事情的脚本而不是要求用户向他们的bash_profile或bashrc添加一些东西)我不是要脚本本身,只是一个关于如何走这条路的快速指针(如果可能的话)。我们还研究了这个很有帮助的问题:RVM-isthereawayforsimpleofflineinstall?但有点误导,因为答案只向我们展示了如何离线在RVM中安装ruby。我们需要能够离线安装RVM本身,并查看脚本https://raw.github.com/wayn
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
目录1.AdmobSDK下载地址2.将下载好的unityPackagesdk导入到unity里编辑 3.解析依赖到项目中
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
背景here.在上面的链接中,给出了以下示例:classauthor.id)endend除了这种语法对于像我这样的初学者来说很陌生——我一直认为类方法是用defself.my_class_method定义的——我在哪里可以找到关于类的文档RubyonRails中的方法?据我所知,类方法总是在类本身(MyClass.my_class_method)上调用,但如果Rails中的类方法是可链接的,似乎必须进行其他操作在这里!编辑:我想我通过对类方法的语法发表评论有点被骗了。我真的想问Rails如何使类方法可链接—我了解方法链接的工作原理,但不知道Rails如何允许您链接类方法而无需实际返
首先,关于我们系统的一些信息,它基本上是建筑行业的电子招标解决方案。所以:列表项我们的系统有多家公司每个公司都有多个用户每家公司可以创建多个拍卖然后其他公司可以为可用的拍卖提交他们的出价。一个出价包含数百或数千个单独的项目,我们只需要加密这些记录的“价格”部分。我们面临的问题是,我们的大客户不希望我们知道投标价格,至少在投标过程中是这样,这是完全可以理解的。现在,我们只是通过对称加密对价格进行加密,因此即使价格在数据库中有效加密,他们担心的是我们拥有解密价格的key。因此,我们正在研究某种形式的公钥加密系统。以下是我们对解决方案的初步想法:当一家公司注册时,我们会使用OpenSSL为其