目录
VisDrone2022数据集由中国天津大学机器学习与数据挖掘实验室的AISKYEYE团队收集。基准数据集由 265,228 帧和 10,209 张静态图像组成的 400 个视频片段组成,由各种无人机摄像头捕获,涵盖广泛的方面,包括位置(取自中国相隔数千公里的 14 个不同城市)、环境(城市和乡村)、物体(行人、车辆、自行车等)和密度(稀疏和拥挤的场景)。请注意,数据集是使用各种无人机平台(即具有不同型号的无人机)在不同的场景以及各种天气和照明条件下收集的。这些帧使用超过 260 万个边界框或经常感兴趣的目标点(如行人、汽车、自行车和三轮车)手动注释。还提供了一些重要属性,包括场景可见性、对象类和遮挡,以提高数据利用率。
Introduction – VISDRONE (aiskyeye.com)
ppyoloe实战之VisDrone2019无人机数据-pudn.com
DOTA 数据集是用于航拍图像中的目标检测的大型图像数据集。它可用于发现和评估航拍图像中的物体。无论从数量还是质量上来说,在同类型数据集中都具有很大优势
作为计算机视觉的重要数据之一,遥感图像对于分析地球信息具有重要的作用。
遥感图像一般来自卫星,航拍图像可能来自大型飞机、无人机、直升机等。这些数据通常被用来进行计算机视觉分类、检测、分割、跟踪任务的训练,以及该领域特定的建筑重建、地物提取、地物属性(高度等)预测等。
2806 幅航拍图,15 个类别详细标注
DOTA 数据集便是用于航拍图像中目标检测的图像数据集,其被用于发现和评估航拍图像中的物体。
这些图像来源包含不同传感器和平台,包括 Google Earth、JL–1 卫星拍摄,以及中国资源卫星数据和应用中心的 GF–2 卫星拍摄。
数据集共计 2806 幅航拍图,每张图像的像素尺寸在 800*800 到 4000*4000 的范围内,其中包含不同尺度、方向和形状的物体。之后这些 DOTA 图像经由专家使用 15 个常见目标类别进行注释,包括:飞机,轮船,储罐,棒球场,网球场,篮球场,地面跑道,港口,桥梁,大型车辆,小型车辆,直升机,环形交叉路口,足球场和篮球场。
完全注释的 DOTA 图像包含 188282 个实例,每个实例均由任意四边形进行标记。
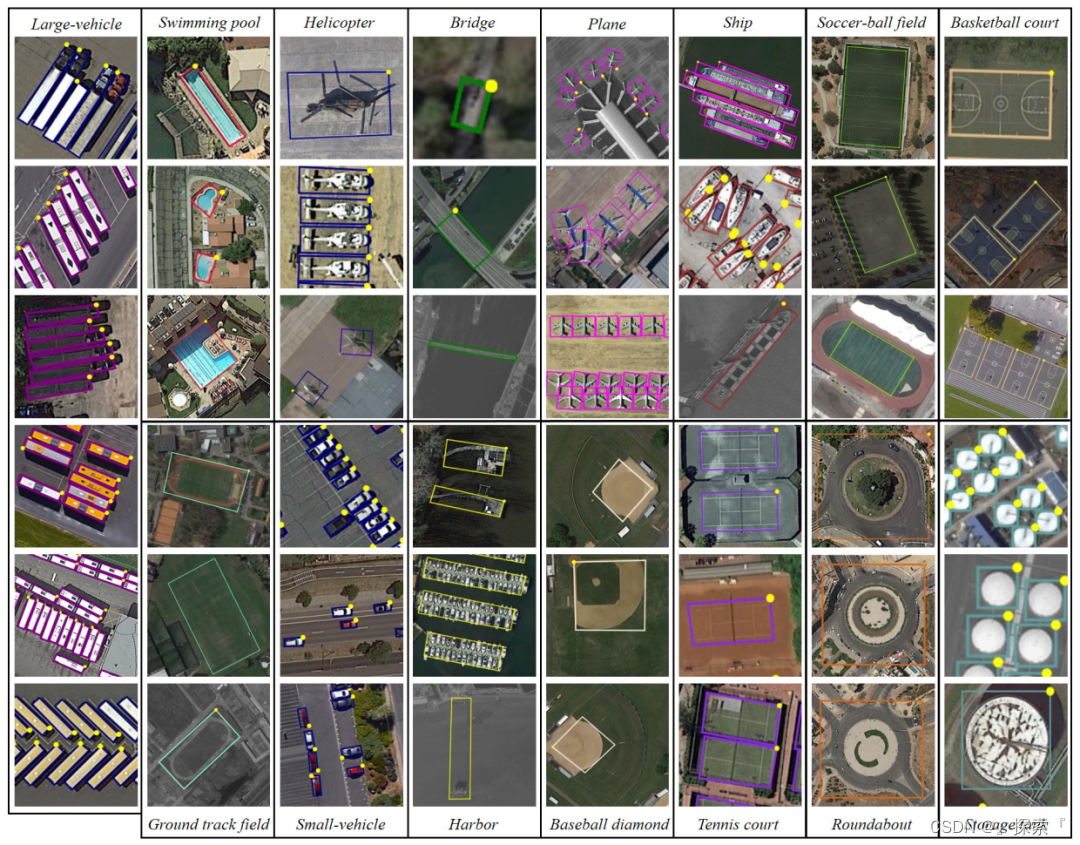
数据集中用标注有定向的边界框标注
实发布机构: 武汉大学
包含数量:2806 张航拍图片
数据格式:txt.pnd
图片尺寸:800 * 800~4000*4000
数据大小:35 GB
类别数:15 类
发布时间:2017 年 11 月
DOTA 数据集:2806 张遥感图像,近 19 万个标注实例_HyperAI超神经的博客-CSDN博客
Dataset of Object Detection in Aerial Images,中国科学院大学模式识别与智能系统开发实验室标注的,只包含两类目标:汽车,飞机,以及背景负样本。样本数量如下:

相关链接:http://www.ucassdl.cn/resource.asp
DownLoad: Dataset 及其基本情况概述Instruction Instruction-cn
References:[1]H. Zhu, X. Chen, W. Dai, K. Fu, Q. Ye, J. Jiao, "Orientation Robust Object Detection in Aerial Images Using Deep Convolutional Neural Network," IEEE Int'l Conf. Image Processing, 2015.
UAVDT是一个具有大规模的挑战性的无人机检测和跟踪基准(即10小时原始视频中约8万帧的代表性帧),用于3项重要的基本任务,即目标检测(DET)、单目标跟踪(SOT)和多目标跟踪(MOT)。
数据集由无人机在各种复杂场景中捕获。本基准中关注的对象是车辆。使用边界框和一些有用的属性(例如,车辆类别和遮挡)对帧进行手动注释。
UAVDT基准由100个视频序列组成,这些视频序列是从城市地区多个地点的UAV平台拍摄的超过10小时的视频中选择的,代表各种常见场景,包括广场、主干道、收费站、高速公路、交叉口和T形交叉口。视频以每秒30帧(fps)的速度录制,JPEG图像分辨率为1080×540像素。
该数据集包含的是原始图片,不包括注释
来源:https://sites.google.com/view/grli-uavdt/%E9%A6%96%E9%A1%B5
参考:D. Du, Y. Qi, H.g Yu, Y. Yang, K. Duan, G. Li, W.g Zhang, Q. Huang, Q. Tian, " The Unmanned Aerial Vehicle Benchmark: Object Detection and Tracking", European Conference on Computer Vision (ECCV), 2018.
UAVDT:无人机目标检测与跟踪数据集 - 飞桨AI Studio (baidu.com)
数据集图片:
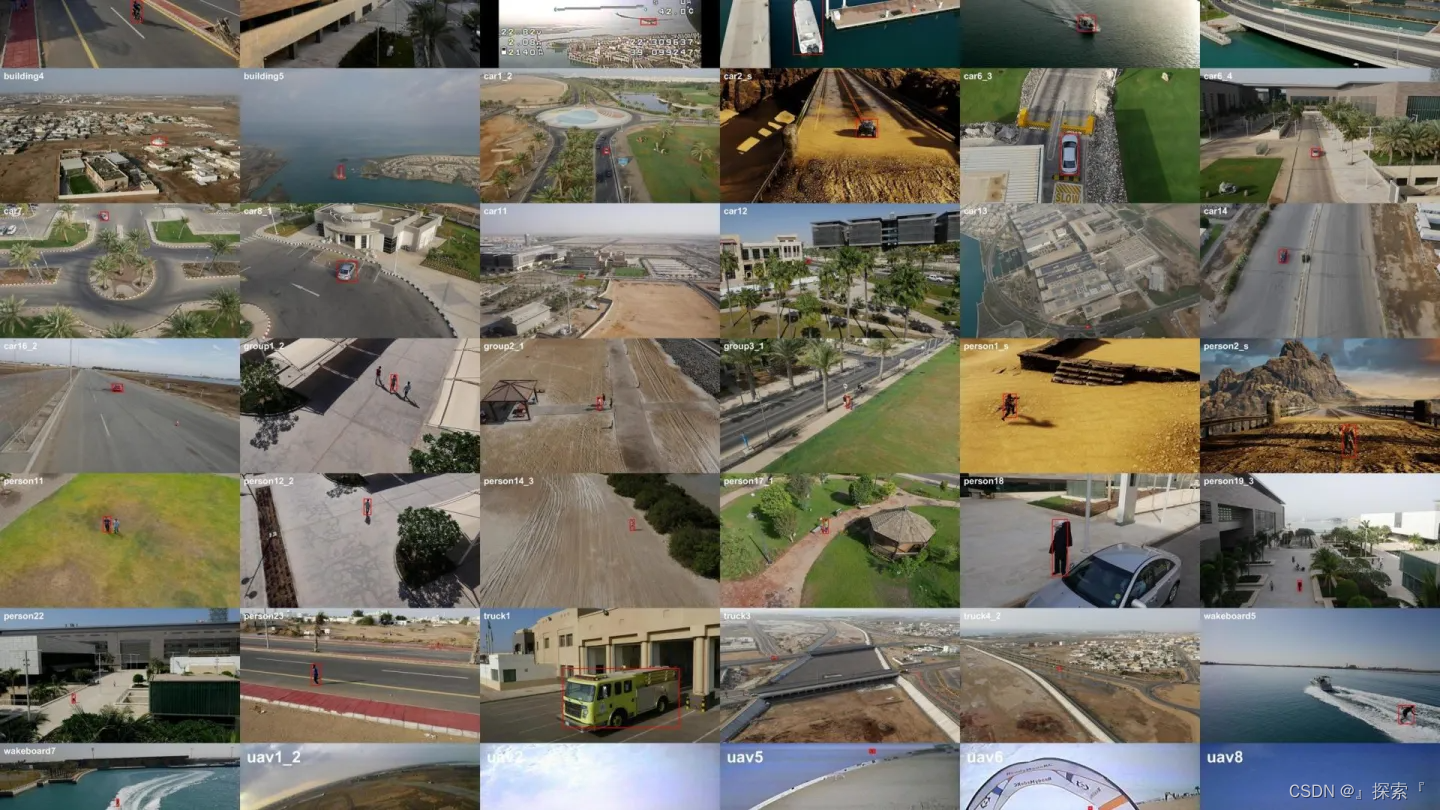
数据集内容:UAV123是一个从低空无人机捕获的视频跟踪数据集,目标功能在于长期空中跟踪(UAV20L)。
数据集数量:UAV123数据集,包含总共123个视频序列和超过110K帧,使其成为仅次于ALOV300 ++的第二大对象跟踪数据集。
UAV123数据集可以分为3个子集
第一,103个视频序列,由专业的高级的无人机稳定可控的相机捕获,高度5~25meters,frame rates30
96fps,resolution·720p4K。最后所有的视频提供720p,30fps,并完全手工标注。
第二,12个视频序列,由价格比较低的无人机不稳定的相机捕获,这些序列拥有低的质量和分辨率,还包含合理的噪声,并完全手工标注。
第三,8个合成的视频序列,由我们提出的UAV模拟器。目标随着预先定义的轨迹移动,使用Unreal Game Engine rendered,同时自动标注在30fps,同时也可以获得目标mask/segmentation
UAV123数据集包含了大量的场景,目标,和动作。很自然的,这些序列包含了通常目标跟踪的一些挑战。
下图是很现有数据集的一个比较:
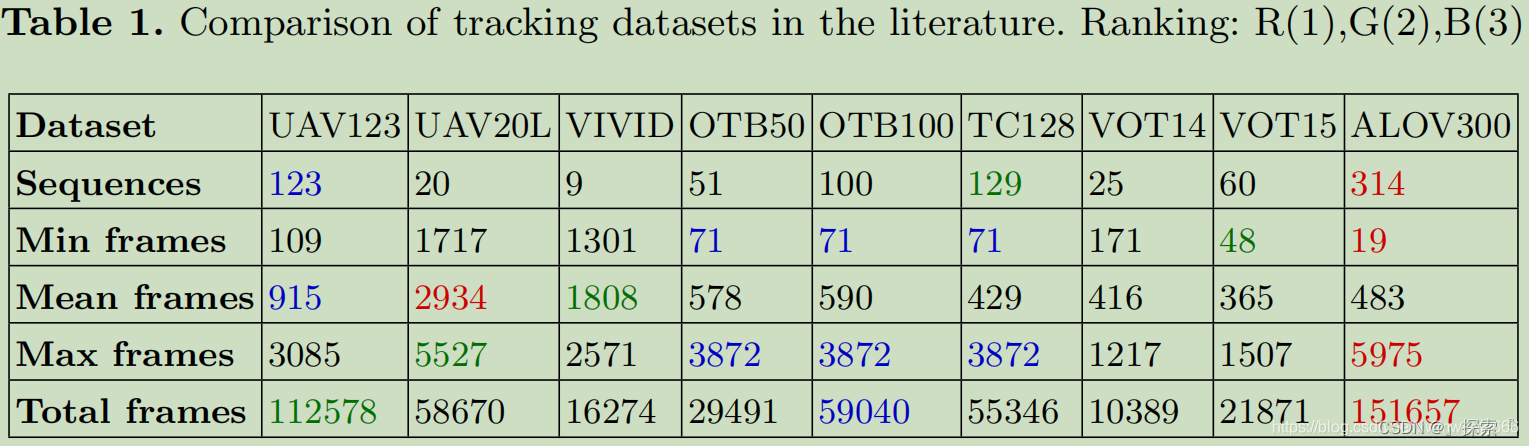
目标跟踪数据集整理(六)-----UAV_xwmwanjy666的博客-CSDN博客_uav数据集
汽车停车场数据集(CARPK)包含了无人机(PHANTOM 3 PROFESSIONAL)从4个不同的停车场收集的近9万辆汽车。这些图像是在大约40米高度的无人机视角下收集的。每辆车用边界框标注图像集。所有标记的边界框都已很好地记录了左上角的点和右下角的点。它支持对象计数、对象本地化以及对边界框中的注释格式的进一步研究。
CARPK Dataset | Papers With Code
数据集图片:
数据集内容:AU-AIR数据集是第一个用于目标检测的多模式UAV数据集。
数据集来自不同机载传感器的,多模式数据的无人机视觉和机器人技术,并推动了空中监视的计算机视觉和机器人算法的开发。
数据集数量:AU-AIR数据集包括2小时的原始视频,32823个标记的帧,132034个对象实例,与交通监控有关的8个对象类别
数据集功能:目标检测
无人机视角的这10个数据集,千万不要错过! - 知乎 (zhihu.com)
数据集图片:
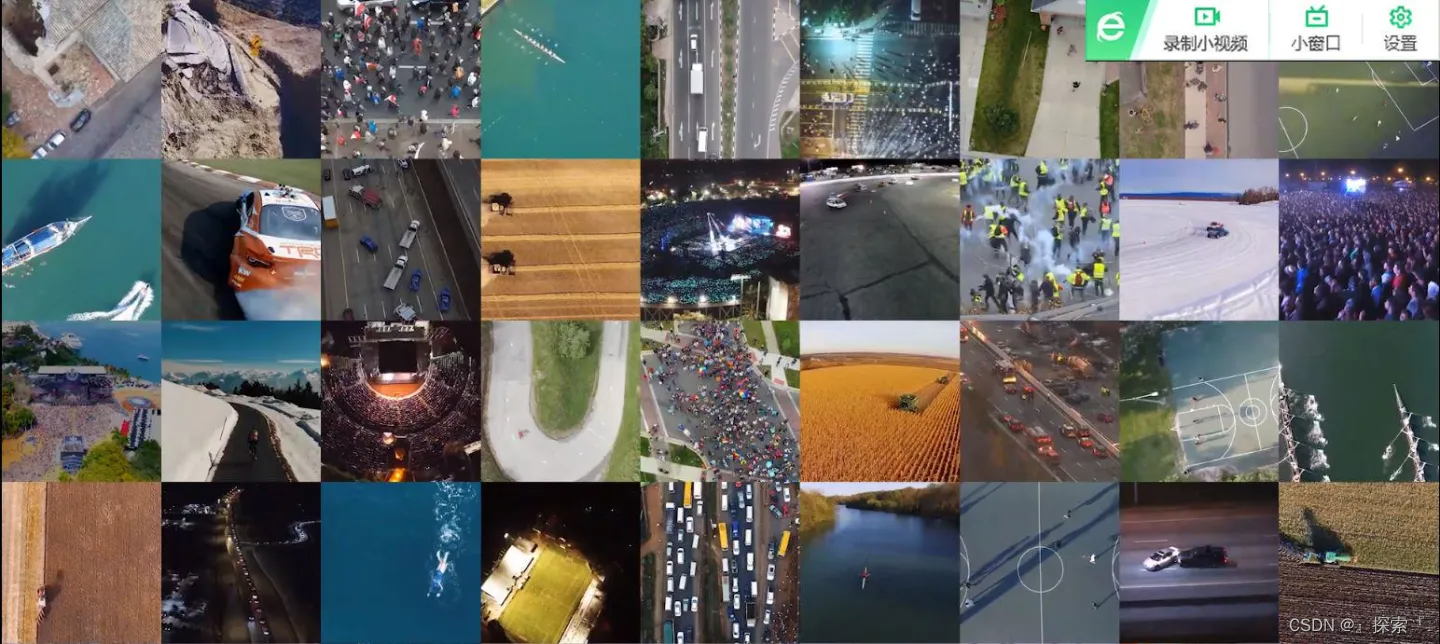
数据集内容:随着无人驾驶飞机(UAV)的广泛普及,已经制作了大量的航拍视频。人们筛选如此大的数据并理解其内容是不现实的。因此,对无人机视频自动理解的方法学研究至关重要。
数据集数量:在这项工作中,提出了一个大型的数据集,称为ERA(航拍视频中的事件识别),由2864个视频组成,每个视频都包含一个来自25个不同类别的标签,对应于展开5秒640*640大小的视频。
数据集功能:视频分析、目标检测
数据集介绍
数据集背景:
数据集内容:
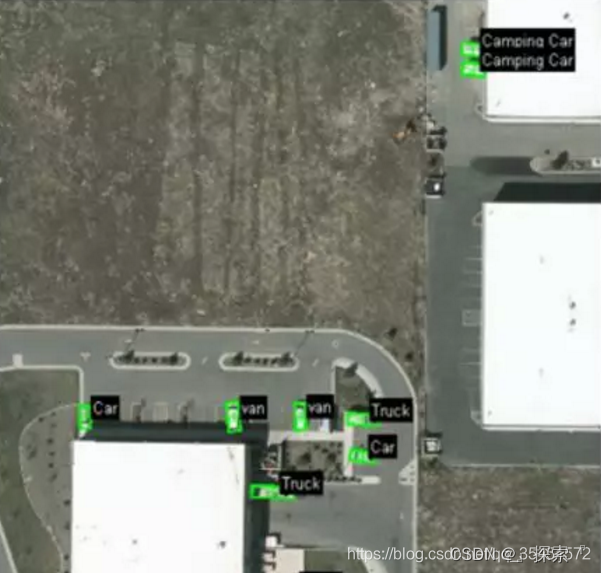
包括512*512、1024*1024两种尺寸数据,每种数据包含rgb、nir2种图像,共4波段
影像信息:
标注信息:
9类,共3640个目标
来源:
Vehicle Detection in Aerial Imagery (VEDAI) : a benchmark
遥感目标检测——VEDAI - 飞桨AI Studio (baidu.com)

数据集介绍
数据集背景:
数据集内容:
影像信息:
标注信息:
1类,共23543个目标
来源:
ITCVD Dataset — University of Twente Research Information
遥感目标检测——ITCVD - 飞桨AI Studio (baidu.com)
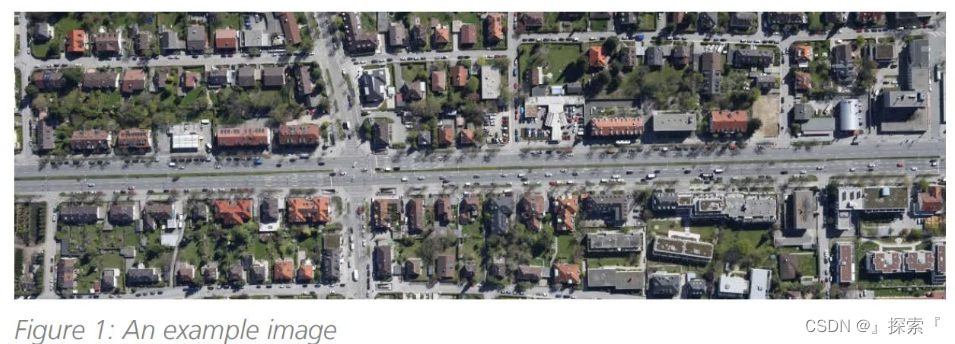
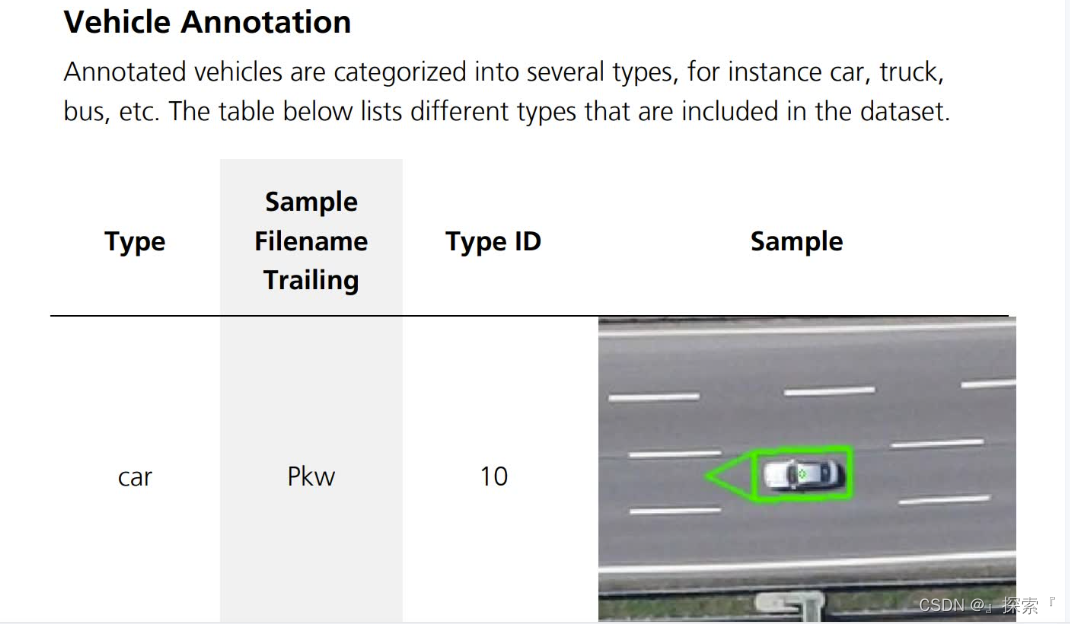
DLR 3K车辆:DLR 3K车辆数据集(Liu and Mattyus, 2015)是另一个设计用于车辆检测的数据集。它包含20张5616 3744航拍图像,空间分辨率为13厘米。它们是在距地面1000米的高空使用DLR 3K摄像机系统(一种近乎实时的机载数字监控系统)在德国慕尼黑地区拍摄的。有14235辆车是通过在图片中使用定向包围框手动标记的。
其bbox不是coco的格式,给出的是中心点的坐标,宽度和长度以及与x轴形成的角度,具体信息在Dataset Description.pdf中有解释。
数据集介绍
数据集背景:
数据集内容:
影像信息:
标注信息:
5类,共1800个目标
来源:
Overhead Imagery Research Data Set download | SourceForge.net
遥感目标检测——OIRDS - 飞桨AI Studio (baidu.com)
NWPU Dataset 是一个遥感影像数据集,其中 NWPU-RESISC45 Dataset 是由西北工业大学创建的遥感图像场景分类可用基准,该数据集包含像素大小为 256*256 共计 31500 张图像,涵盖 45 个场景类别,其中每个类别有 700 张图像。
这 45 个场景类别包括飞机、机场、棒球场、篮球场、海滩、桥梁、丛林、教堂、圆形农田、云、商业区、密集住宅、沙漠、森林、高速公路、高尔夫球场、地面田径、港口、工业地区、交叉口、岛、湖、草地、中型住宅、移动房屋公园、山、立交桥、宫、停车场、铁路、火车站、矩形农田、河、环形交通枢纽、跑道、海、船舶、雪山、稀疏住宅、体育场、储水箱、网球场、露台、火力发电站和湿地。
该数据集由西北工业大学发布,相关论文有《Remote Sensing Image Scene Classification: Benchmark and State of the Art》。
NWPU Data Set 遥感影像数据集 - 数据集下载 - 超神经 (hyper.ai)
西工大韩军伟课题组提出了一种用于光学遥感图像中目标检测的大规模基准数据集“DIOR”,由23463幅图像和190288个目标实例组成,并对近年来基于深度学习的目标检测方法进行了综述。目标类别如下图。大小800 * 800,分辨率0.5m到30m。包括不同季节、不同天气。位置增强。来源Google Earth。

我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳
我正在尝试使用Curbgem执行以下POST以解析云curl-XPOST\-H"X-Parse-Application-Id:PARSE_APP_ID"\-H"X-Parse-REST-API-Key:PARSE_API_KEY"\-H"Content-Type:image/jpeg"\--data-binary'@myPicture.jpg'\https://api.parse.com/1/files/pic.jpg用这个:curl=Curl::Easy.new("https://api.parse.com/1/files/lion.jpg")curl.multipart_form_
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录一、概述简介原理模块二、配置Mysql使用版本环境要求1.操作系统2.mysql要求三、配置canal-server离线下载在线下载上传解压修改配置单机配置集群配置分库分表配置1.修改全局配置2.实例配置垂直分库水平分库3.修改group-instance.xml4.启动监听四、配置canal-adapter1修改启动配置2配置映射文件3启动ES数据同步查询所有订阅同步数据同步开关启动4.验证五、配置canal-admin一、概述简介canal是Alibaba旗下的一款开源项目,Java开发。基于数据库增量日志解析,提供增量数据订阅&消费。Git地址:https://github.co
我正在尝试在Rails上安装ruby,到目前为止一切都已安装,但是当我尝试使用rakedb:create创建数据库时,我收到一个奇怪的错误:dyld:lazysymbolbindingfailed:Symbolnotfound:_mysql_get_client_infoReferencedfrom:/Library/Ruby/Gems/1.8/gems/mysql2-0.3.11/lib/mysql2/mysql2.bundleExpectedin:flatnamespacedyld:Symbolnotfound:_mysql_get_client_infoReferencedf
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手
前言一般来说,前端根据后台返回code码展示对应内容只需要在前台判断code值展示对应的内容即可,但要是匹配的code码比较多或者多个页面用到时,为了便于后期维护,后台就会使用字典表让前端匹配,下面我将在微信小程序中通过wxs的方法实现这个操作。为什么要使用wxs?{{method(a,b)}}可以看到,上述代码是一个调用方法传值的操作,在vue中很常见,多用于数据之间的转换,但由于微信小程序诸多限制的原因,你并不能优雅的这样操作,可能有人会说,为什么不用if判断实现呢?但是if判断的局限性在于如果存在数据量过大时,大量重复性操作和if判断会让你的代码显得异常冗余。wxswxs相当于是一个独立