综合实例应用:方程组的求解
文章目录
无论工程应用问题,还是数学计算问题,方程组都是解决问题转化的重要途径之一,将复杂问题转化为简单的方程组矩阵求解问题。
>> %创建方程组系数矩阵
>> A=[2 1 -5 1;1 -3 0 -6;0 2 -1 2;1 4 -7 6];
>> b=[8 9 -5 0]';
>> %判断方程是否有解
>> %求方程组的秩
>> r=rank(4)
r =
1
>> B=[A,b];%创建增广矩阵
>> s=rank(B)
s =
4
>> %r=s=n(未知数)=4,则该齐次线性方程组有唯一解。
>> %利用矩阵的逆
>> x0=pinv(A)*b
x0 =
3.0000
-4.0000
-1.0000
1.0000
利用矩阵分解来求解线性方程组,是工程计算中最常用的计算。
LU分解法是先将系数矩阵A进行LU分解,得到LU=PA,然后解Ly=Pb,最后再解Ux=y得到原方程组的解。
编写利用LU分解法求解线性方程组Ax=b的自定义函数M文件,操作方法:

函数solvebyLU的程序,如下所示
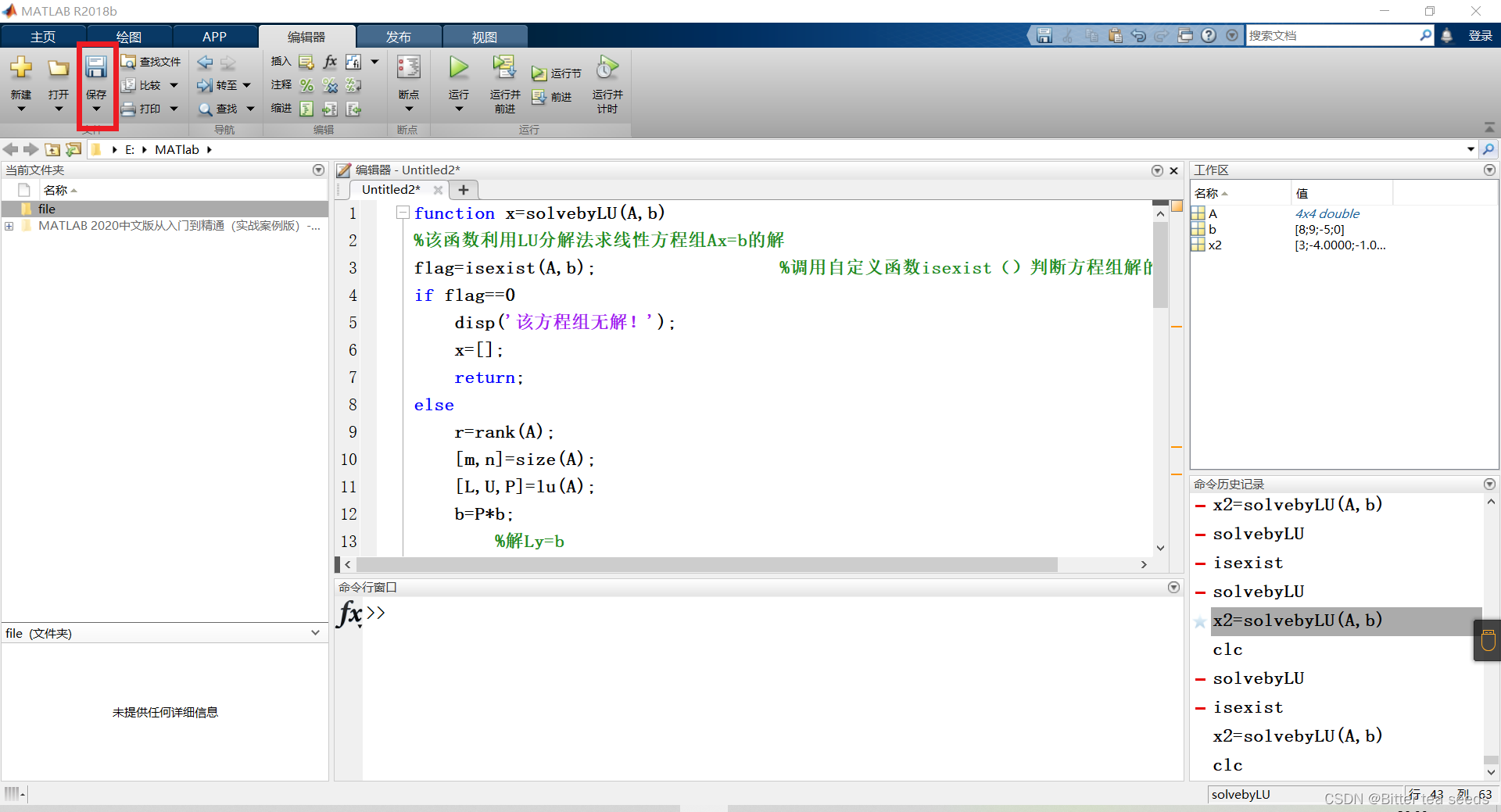
function x=solvebyLU(A,b)
%该函数利用LU分解法求线性方程组Ax=b的解
flag=isexist(A,b); %调用自定义函数isexist()判断方程组解的情况
if flag==0
disp('该方程组无解!');
x=[];
return;
else
r=rank(A);
[m,n]=size(A);
[L,U,P]=lu(A);
b=P*b;
%解Ly=b
y(1)=b(1);
if m>1
for i=2:m
y(i)=b(i)-L(i,1:i-1)*y(1:i-1)';
end
end
y=y';
%解Ux=y得原方程组得一个特解
x0(r)=y(r)/U(r,r);
if r>1
for i=r-1:-1:1
x0(i)=(y(i)-U(i,i+1:r)*x0(i+1:r)')/U(i,i);
end
end
x0=x0';
if flag==1 %若方程组有唯一解
x=x0;
return;
else %若方程组有无穷多解
format rat;
Z=null(A,'r'); %求出对应齐次方程组的基础解系
[mZ,nZ]=size(Z);
x0(r+1:n)=0;
for i=1:nZ
t=sym(char([107 48+i]));
k(i)=t; %取k=[k1,k2...,];
end
x=x0;
for i=1:nZ
x=x+k(i)*Z(:,i); %将方程组的通解表示为特解加对应齐次通解形式
end
end
end

函数isexist()的程序,如下所示
function y=isexist(A,b)
%该函数用来判断线性方程组Ax=b的解的存在性
%若方程组无解则返回0,若有唯一解则返回1,若有无穷多解则返回Inf。
[m,n]=size(A);
[mb,nb]=size(b);
if m~=mb
error('输入有误!');
return;
end
r=rank(A);
s=rank([A,b]);
if r==s &&r==n
y=1;
elseif r==s&&r<n
y=Inf;
else
y=0;
end
命令行代码,如下所示
>> A=[2 1 -5 1;1 -3 0 -6;0 2 -1 2;1 4 -7 6];
>> b=[8 9 -5 0]';
>> x2=solvebyLU(A,b)
x2 =
3
-4
-1
1
利用QR分解法先将系数矩阵A进行QR分解A=QR,然后解Qy=b,最后解Rx=y得到原方程组的解
1.编写求解线性方程组Ax=b的函数solvebyQR,代码如下:
function x=solvebyQR(A,b)
%该函数利用QR分解法求线性方程组Ax=b的解
flag=isexist(A,b); %调用自定义函数isexist()
if flag==0
disp('方程组无解');
x=[];
return;
else
r=rank(A);
[m,n]=size(A);
[Q,R]=qr(A);
b=Q'*b;
%解Rx=b得原方程组得一个特解
x0(r)=b(r)/R(r,r);
if r>1
for i=r-1:-1:1
x0(i)=(b(i)-R(i,i+1:r)*x0(i+1:r)')/R(i,i);
end
end
x0=x0';
if flag==1 %若方程组有唯一解
x=x0;
return;
else %若方程组有无穷多解
format rat;
Z=null(A,'r'); %求出对应齐次方程组得基础解系
[mZ,nZ]=size(Z);
x0(r+1:n)=0;
for i=1:nZ
t=sym(char([107 48+i]));
k(i)=t; %取k=[k1,...,kr];
end
x=x0;
for i=1:nZ
x=x+k(i)*Z(:,i); %将方程组的通解表示为特解加对应齐次通解形式
end
end
end
综合实例—方程组的求解,到这里就结束啦!感谢观看,希望这篇文章对大家有帮助。
为什么以下不同?Time.now.end_of_day==Time.now.end_of_day-0.days#falseTime.now.end_of_day.to_s==Time.now.end_of_day-0.days.to_s#true 最佳答案 因为纳秒数不同:ruby-1.9.2-p180:014>(Time.now.end_of_day-0.days).nsec=>999999000ruby-1.9.2-p180:015>Time.now.end_of_day.nsec=>999999998
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
我编写了一个非常简单的Sassmixin,用于将像素值转换为rem值(请参阅JonathanSnook的articleonthebenefitsofusingrems)。这是代码://MixinCode$base_font_size:10;//10px@mixinrem($key,$px){#{$key}:#{$px}px;#{$key}:#{$px/$base_font_size}rem;}//Includesyntaxp{@includerem(font-size,14);}//RenderedCSSp{font-size:14px;font-size:1.4rem;}这个mixi
慢跑者与狗问题描述一个慢跑者在平面上沿椭圆以恒定的速率𝒗=𝟏跑步,设椭圆方程为:𝒙=𝟏𝟎+𝟐𝟎𝒄𝒐𝒔(𝒕),𝒚=𝟐𝟎+𝟓𝒔𝒊𝒏(𝒕)。突然有一只狗攻击他,这只狗从原点出发,以恒定速率𝒘跑向慢跑者,狗的运动方向始终指向慢跑者。分别求出𝒘=𝟐𝟎,𝒘=𝟓时狗的运动轨迹。模型建立设时刻t慢跑者的坐标为(𝑿(𝒕),𝒀(𝒕)),狗的坐标为(𝒙(𝒕),𝒚(𝒕))。则𝑿=𝟏𝟎+𝟐𝟎𝒄𝒐𝒔(𝒕),𝒀=𝟐𝟎+𝟏𝟓𝒔𝒊𝒏(𝒕),狗从(0,0)出发,建立狗的运动轨迹的参数方程:由于狗始终对准人,因而狗的速度方向平行于狗与人位置的差向量:消去𝝀,得由题意𝑿=𝟏𝟎+𝟐𝟎𝒄𝒐𝒔𝒕,𝒀=𝟐𝟎+1𝟓𝒔𝒊𝒏(𝒕),狗从(0,0)
在正常工作环境中往往是可以使用无线网络的,此时安装一个matlab也不是什么难事;但是也难免也会遇到一些工作电脑不允许链接无线网络,此时若安装一个matlab则是一件非常痛苦的事,因为其安装包就20多个G,当时我是用手机开热点下载的,仅仅下载安装包就浪费了一个下午+一个晚上; 下面就举一个例子,针对安装过matlab和未安装过matlab的情况去介绍C++调用matlab函数的操作流程:一、封装matlab函数首先把matlab代码封装成函数的形式,下面举一个简单的函数为例;functionc=myadd(a,b)c=a+b;end二、编译matlab函数具体的编译
matlab中矩阵点乘和乘的区别MATLAB中,一、矩阵相乘:表示两个矩阵相乘。二、矩阵点乘:表示矩阵中对应位置的元素分别相乘。三、举例3.1矩阵相乘3.2矩阵点乘MATLAB中,一、矩阵相乘:表示两个矩阵相乘。前提条件:满足矩阵相乘的规则,即前矩阵的列数等于后矩阵的行数。二、矩阵点乘:表示矩阵中对应位置的元素分别相乘。前提条件:满足矩阵点乘的规则,即前后矩阵维度相同。三、举例3.1矩阵相乘Example1:A=[123;456]A=123456>>B=[1;2;3]B=123>>C=A*BC=1432这时如果用点乘就会报错Example2:>>A=[123;456;789]A=1234567
目录1.GM(1,1)模型2. 组合预测模型3. GMDH进行时间序列预测4.运行结果5Matlab代码实现1.GM(1,1)模型灰色预测是一种对具有不确定因素的系统进行预测的方法,能有效解决数据少、序列的完整性及可靠性低的问题。GM(1,1)模型是一种较为常用的灰色模型,GM(1,1)预测模型的建立实质上就是对原始数据序列作一次累加生成,使生成数据序列呈显出一定规律,然后通过建立微分方程模型,求得拟合曲线,进而对系统进行预测。2. 组合预测模型灰色模型是通过对原始数据加工处理来弱化随机性的,若数据存在较大的波动性,预测出来的结果可能会存在较大误差。ARIMA模型对于预测的模型比较理想,要求时