* 对被测物体的识别
🔥
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
🚩 基于stm32与openmv的目标跟踪系统
🥇学长这里给一个题目综合评分(每项满分5分)
🧿 项目分享:
https://gitee.com/sinonfin/sharing
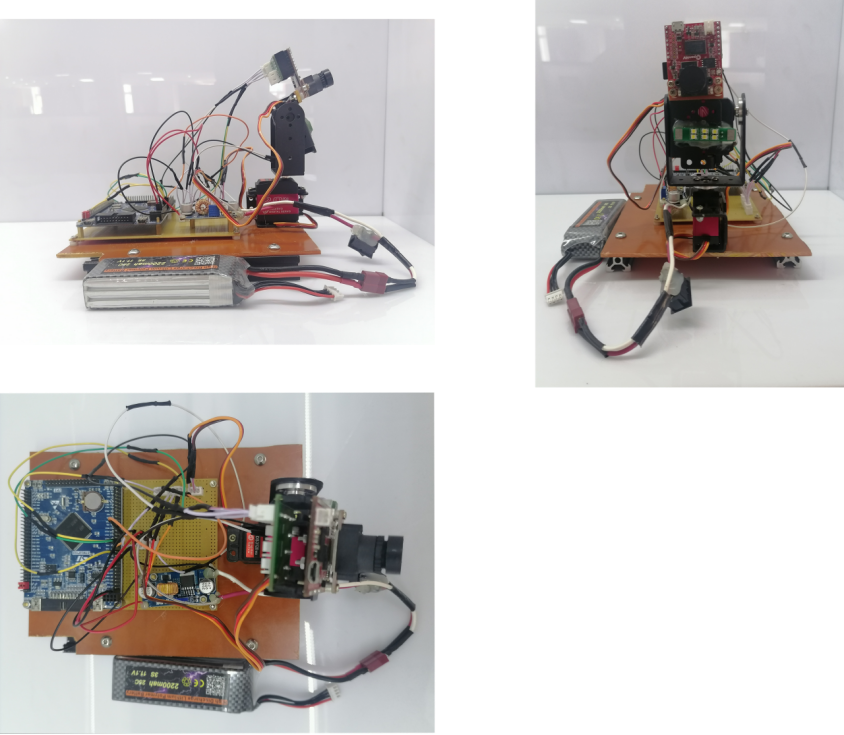
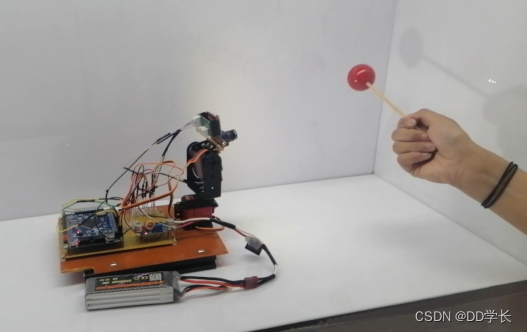
随着智能化技术的迅猛发展,网络智能视频监控系统也得到了广泛的应用。视频监控系统经历了从模拟化向数字化、网络化、智能化的发展过程,目标检测和跟踪技术是计算机视觉的重要组成部分,也是实现监控系统智能化的基础,因其广泛的应用前景而成为近年来的研究热点。本文通过OpenMV作为是识别模块去识别被测物体(以红色小球为例),当其识别到红色小球后,判断小球中心点所在的区域信息,并将其区域标志位通过串口发送给STM32,当STM32接收到位置信息后对x轴、y轴的两个舵机参数进行操作,最后通过定时器输出合适的PWM波,控制舵机旋转相应的角度,使OpenMV摄像头对准被测物体,以实现物体追踪功能。
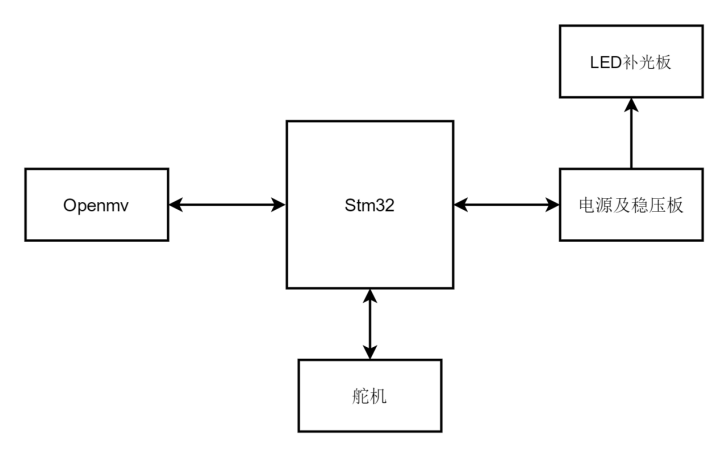
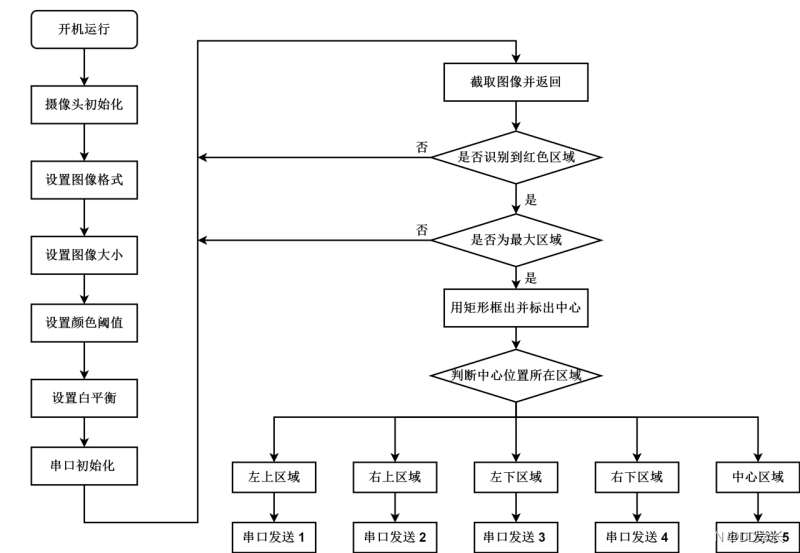
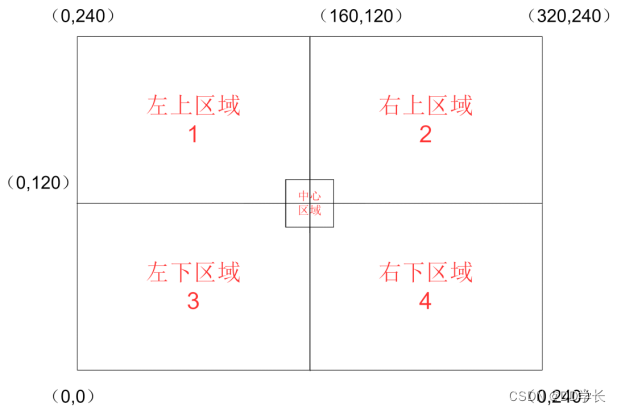
主要分为两个方面:一个是OpenMV识别部分,另一个是STM32控制部分。通过OpenMV对被测物体进行捕捉,所用的被测物体为红色小球,OpenMV编程时,先对红色的色域进行调整,在识别到红色后,对红色进行判断,判断出识别区域中红色区域最大的部分,此举在过滤掉背景中存在小部分红色区域,造成对识别的干扰,识别到红色小球后,用矩形框将其框住,并显示矩形框的中心位置,判断中心位置所在区域,并将区域的标志信息会通过串口传递给STM32,STM32接收到数据后进行相应动作,使定时器输出PWM波,控制舵机旋转相应的角度,使OpenMV摄像头对准被测物体,以实现物体追踪功能。主要研究内容如下:
舵机控制逻辑
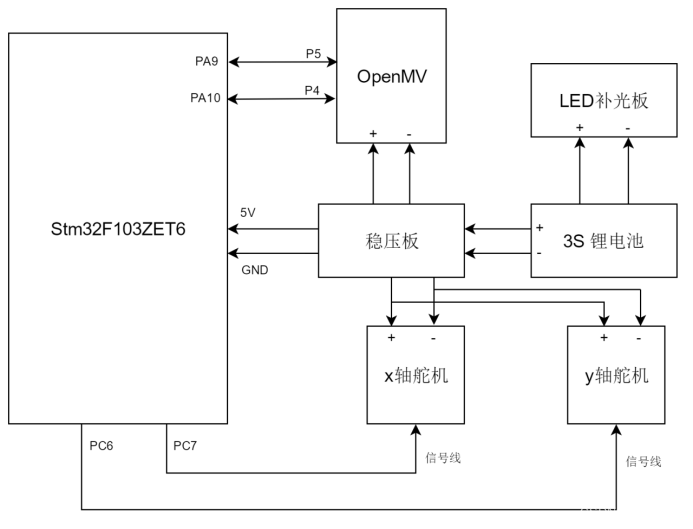
硬件连接部分使用杜邦线连接,连接如下:3S锂电池接稳压板输入端以及直接给LED补光板供电,稳压板输出端接OpenMV的VIN和GND引脚、STM32的5V和GND引脚以及两个舵机的正(红色)负(棕色)极。OpenMV的P4引脚(串口3的TX)接STM32的PA10引脚(串口1的RX),OpenMV的P5引脚(串口3的RX)接STM32的PA9引脚(串口1的TX),STM32的PC7引脚(定时器3通道2)接x轴的舵机的信号线(橙黄色),STM32的PC7引脚(定时器3通道1)接y轴的舵机的信号线(橙黄色)。
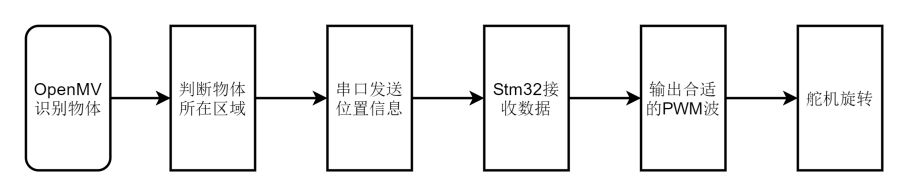
软件部分的功能主要分为两部分,一个是OpenMV部分,另一是STM32部分,OpenMV主要实现功能:完成被测物体的识别、寻找最大色块区域、判断被测物体所在区域、通过串口发送被测物体的位置信息。STM32部分主要实现功能:使用串口接收OpenMV发来的数据、通过定时器输出PWM波、以及实现控制舵机旋转追踪的目的。
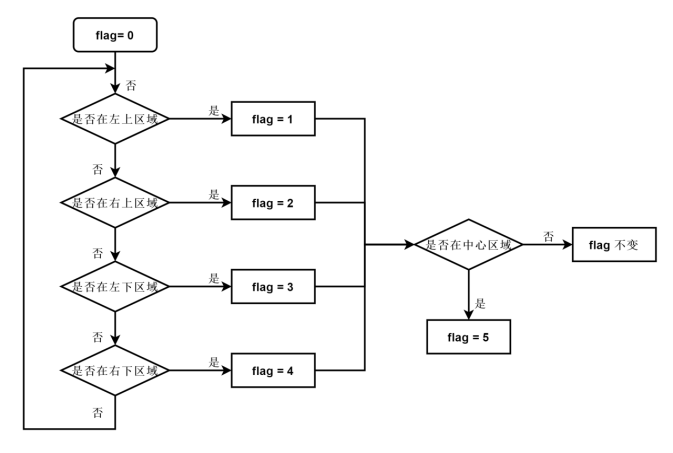
整体逻辑
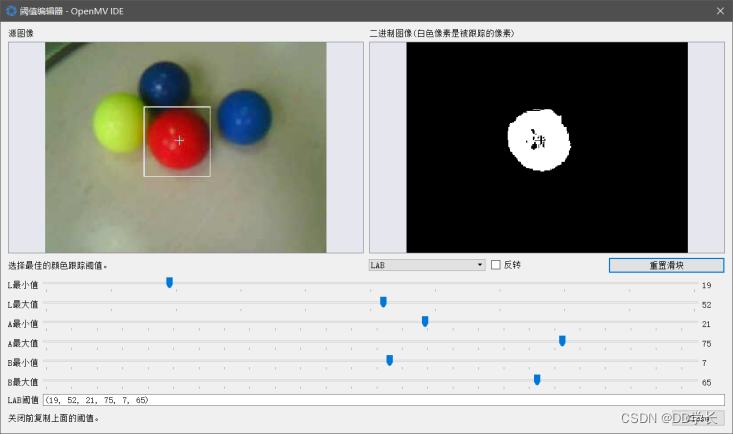
本设计中被测物体为一个红色小球,因此对于物体的识别主要为颜色识别,在编程中首先需要对OpenMV的红色的阈值进行调整,意在告诉OpenMV“什么是红色”,打开阈值编辑器,对LAB的阈值进行调整,使二进制图像中只有红色区域的映像
import sensor, image, time, pyb
ensor.reset() # 初始化摄像头传感器.
sensor.set_pixformat(sensor.RGB565) # 使用RGB565.
sensor.set_framesize(sensor.QVGA) # 分辨率:320*240
sensor.skip_frames(10) # 让新设置生效.
sensor.set_auto_whitebal(False) # 关闭自动白平衡.
clock = time.clock() # Tracks FPS.
red_threshold = (14, 68, 11, 70, 9, 56) #红色阈值设定
while(True):
img = sensor.snapshot() # 拍照并返回图像.
blobs = img.find_blobs([red_threshold])
img.draw_rectangle(blobs)
img.draw_cross(blobs.cx(), blobs.cy())
import sensor, image, time, pyb
from pyb import UART
red_threshold = (14, 68, 11, 70, 9, 56) #红色阈值设定
sensor.reset() # 初始化摄像头传感器.
sensor.set_pixformat(sensor.RGB565) # 使用RGB565.
sensor.set_framesize(sensor.QVGA) # 使用QVGA.
sensor.skip_frames(10) # 让新设置生效.
sensor.set_auto_whitebal(False) # 关闭自动白平衡.
clock = time.clock() # Tracks FPS.
uart = UART(3, 115200)
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
led = pyb.LED(1)
while(True):
img = sensor.snapshot() # 拍照并返回图像.
blobs = img.find_blobs([red_threshold])
x_max = 320
x_min = 0
x_1 = 115
x_2 = 185
y_max = 240
y_min = 0
y_1 = 95
y_2 = 145
if blobs:
max_blob=find_max(blobs)
print('sum :', len(blobs))
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
if max_blob.cx()>= x_min and max_blob.cx() <= x_1 and\
max_blob.cy() >= y_2 and max_blob.cy() <= y_max :
flag = 1
if max_blob.cx()>= x_2 and max_blob.cx() <= x_max and\
max_blob.cy() >= y_2 and max_blob.cy() <= y_max :
flag = 2
if max_blob.cx()>= x_min and max_blob.cx() <= x_1 and\
max_blob.cy() >= y_min and max_blob.cy() <= y_1 :
flag = 3
if max_blob.cx()>= x_2 and max_blob.cx() <= x_max and \
max_blob.cy() >= y_min and max_blob.cy() <= y_1 :
flag = 4
if max_blob.cx()> x_1 and max_blob.cx() < x_2 and\
max_blob.cy() > y_1 and max_blob.cy() < y_2 :
flag = 5
output_str="%d" %flag
led.on()
print('you send:',output_str)
uart.write(output_str+'\r\n')
else:
print('not found!')
led.off()
STM32程序:
main.c:
#include "STM32f10x.h"
#include "control.h"
#include "Systick.h"
#include "usart.h"
#include "pwm.h"
int main()
{
Systick_init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组
USART1_Init(115200);
TIM3_CH2_PWM_Init(20000-1,72-1); //20ms
TIM3_CH1_PWM_Init(20000-1,72-1);
//舵机角度参数:19500-17500(前者为0°,后者为180°)
TIM_SetCompare2(TIM3,19500);//x轴角度初始化,下面的舵机。
TIM_SetCompare1(TIM3,18700);//y轴角度初始化,上面的舵机。
Delay(2500);
while(1);
}
pwm.c:
#include "pwm.h"
void TIM3_CH2_PWM_Init(u16 per,u16 psc)//控制x轴舵机(引脚:PC7)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* 开启时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
/* GPIO配置 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(GPIOC,&GPIO_InitStructure);
/* GPIO重映射 */
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);//改变指定管脚的映射
TIM_TimeBaseInitStructure.TIM_Period=per; //自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
/* PWM参数配置 */
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC2Init(TIM3,&TIM_OCInitStructure); //输出比较通道2初始化
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE);//使能预装载寄存器
TIM_Cmd(TIM3,ENABLE); //使能定时器
}

🧿 项目分享:
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
2022年底,OpenAI的预训练模型ChatGPT给人工智能领域的爱好者和研究人员留下了深刻的印象和启发,他展现的惊人能力将人工智能的研究和应用热度推向高潮,网上也充斥着和ChatGPT的各种聊天,他可以作诗、写小说、写代码、讨论疫情问题等。下面就是一些他的神回复:人命关天的坑: 写歌,留给词作者的机会不多了。。。 回答人类怎么样面对人工智能: 什么是ChatGPT?借用网上的一段介绍,ChatGPT是由人工智能研究实验室OpenAI在2022年11月30日发布的全新聊天机器人模型,一款人工智能技术驱动的自然语言处理工具。它能够通过学习和理解人类的语言来进行对话,还能根据聊天的上下文进行互动
我正在为在AmazonEC2实例上运行的应用程序设计一个AutoScaling系统。应用程序从SQS读取消息并对其进行处理。AutoScaling系统将监控两件事:SQS中的消息数量,所有EC2机器上运行的进程总数。例如,如果SQS中的消息数量超过3000,我希望系统自动缩放,创建一个新的EC2实例,在其上部署代码,当消息数量低于2000时,我希望系统终止EC2实例.我正在用Ruby和Capistrano做这件事。我的问题是:我无法找到一种方法来确定在所有EC2机器上运行的进程数并将该数字保存在变量中。你能帮帮我吗? 最佳答案 您可
我是Ruby和Watir-Webdriver的新手。我有一套用VBScript编写的站点自动化程序,我想将其转换为Ruby/Watir,因为我现在必须支持Firefox。我发现我真的很喜欢Ruby,而且我正在研究Watir,但我已经花了一周时间试图让Webdriver显示我的登录屏幕。该站点以带有“我同意”区域的“警告屏幕”开头。用户点击我同意并显示登录屏幕。我需要单击该区域以显示登录屏幕(这是同一页面,实际上是一个表单,只是隐藏了)。我整天都在用VBScript这样做:objExplorer.Document.GetElementsByTagName("area")(0).click
本文章承接《基于Python的人脸识别课堂考勤系统(毕设)》,填坑上篇文章遗留的代码部分。因为项目分的模块比较多,再加上本人能力有限,所以代码过于臃肿还存在许多优化的地方。同样本篇文章也仅适用于小白,零基础人群。PS:每个文件之中代码都已经区分开来,可以对照左侧目录部分实现快速预览! 由于代码过于多我这里分成上,下两个部分来发布吧!一、主文件importosimportsysimportrandomimportpymysqlimportcv2importnumpyasnpfrommathimportpifrommatplotlibimportpyplotaspltfromPILimpor