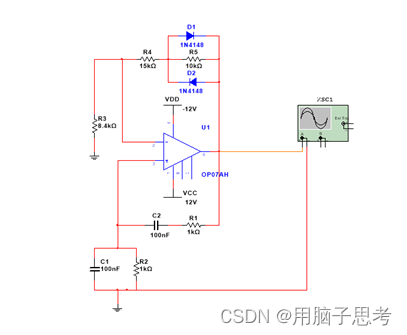
在这里使用的OP07的原因是学校提供这个芯片,需要注意的是OP07相应的引脚与别的芯片有所差别,但原理基本一致。
放大信号,刚上电的时,电路会出现频率丰富的微小噪声,放大器将噪声放大
要使振荡稳定,信号不能无休止的放大下去,于是我们引入负反馈,使放大倍数稳定在3倍
选出所需的频率,运用RC带通滤波器(RC低通和高通的组合),即可提取所需的频率
同时RC并联串联网络也是电路的正反馈网络
振荡需要满足以下两个条件:
(1)相位平衡条件:反馈电路的相位与输入电压的相位同相
(2)振幅平衡条件:反馈电压的幅度与输入电压的幅度相等,这是电路维持稳振荡的振幅条件
刚开始的时候放大倍数与反馈系数乘积大于1,信号持续放大,大到一定程度时,放大倍数减小,使得电路放大倍数为与反馈系数的乘积为1,信号稳定输出。
反馈是将输出信号的全部或一部分返回至输入,使输入信号改变,而负反馈是引起输入信号减小的一种反馈方式。
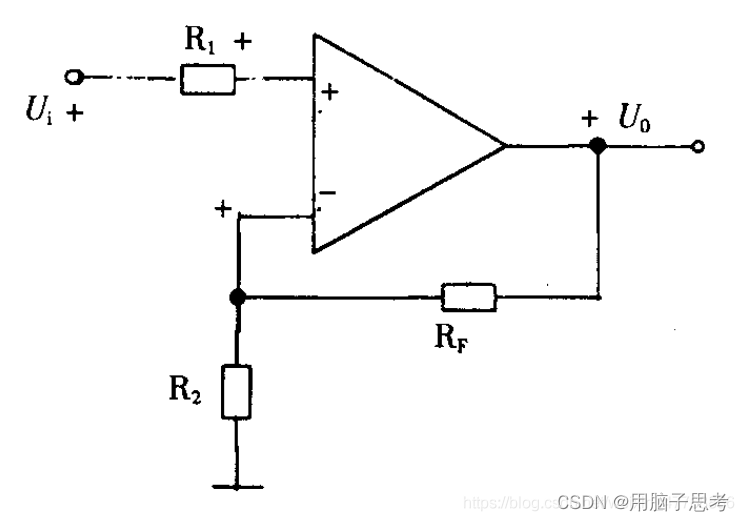
同向放大器引入负反馈,使得输出信号与输入信号比值稳定,且因为是同向放大器,故
左图为同向放大器示意图
放大倍数A=1+RF/R2
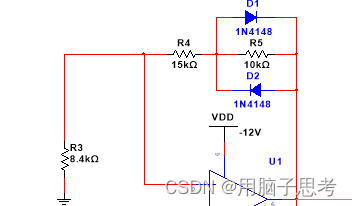
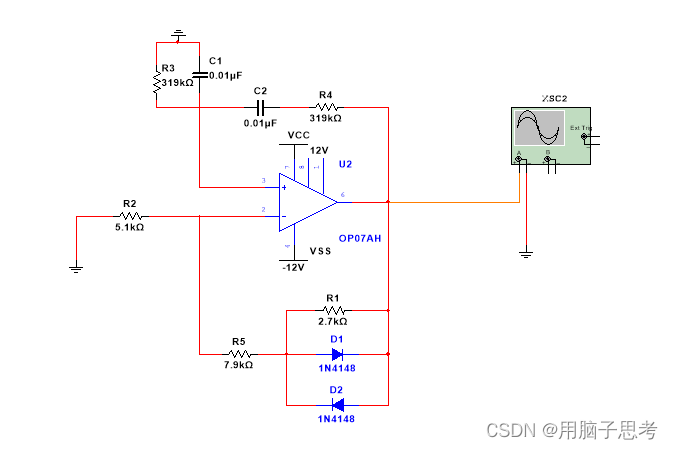
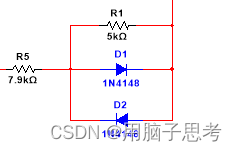
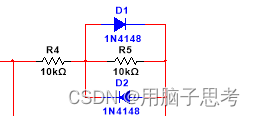
右图为实际电路的原理图
当信号较小时,二极管不导通,放大倍数为A=1+(R4+R5)/R3
当信号较大时,二极管导通,放大倍数为A=1+(R4+r)/R3,r为R5所对应的匹配电阻
由于二极管的导通与关闭,使得放大倍数不断变化,最终稳定在A=3,相当于二极管与R5形成一个对应的匹配电阻
需要注意,R4 < 2*R3, R4+R5 > 2*R3
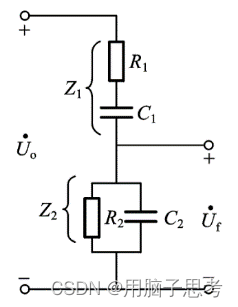
正反馈:
反馈是将输出信号的全部或一部分返回至输入,使输入信号改变,而正反馈是引起输入信号增大的一种反馈方式。
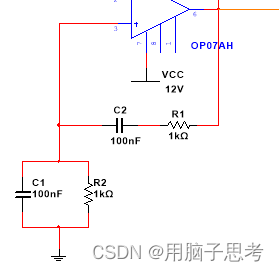
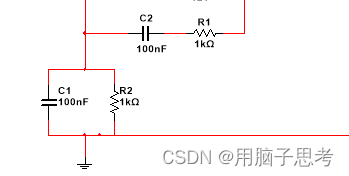
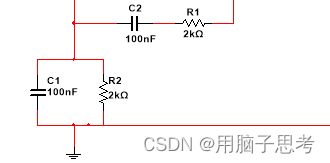
上图为实际电路的反馈网络,将输出电压的一部分,即C1R2并联网络上面的分压送回输入端,使得净输入量增大。
R2C1 和 R1C2 组成正反馈网络,反馈系数为F=U(R2C1)/ U(R1C2),可等效为阻抗之比(电压与阻抗成正比),F=Z(R2C1)/ Z(R1C2)。
选频网络:
RC滤波器
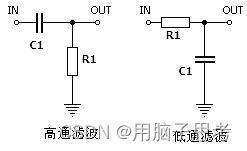
其中高通滤波器与低通滤波器的区别就在于电容电阻的摆放位置,高通滤波器顾名思义是通过高频信号,阻断低频信号,因此电容放在输入端,低通滤波器的输入端接电阻,这是根据电容通交流阻直流的特性判断的,如果电容足够大,那么我们可以将频率过低的信号近似等效成直流信号,那么他就不会通过高通滤波器的第一个电容。
RC带通滤波器
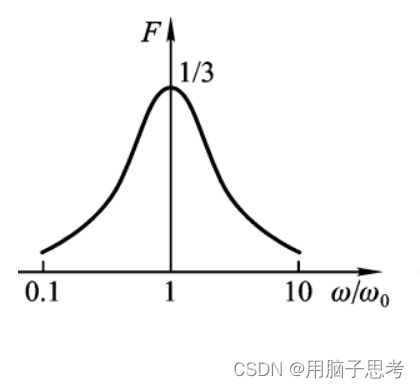
该电路由高通和低通滤波器组合而成,其中R1=R2,C1=C2,频率为f=1/(2πRC)。
f=1/(2*Π*RC)(R1 = R2,C1 = C2),f=1/(2*Π*R1C2)
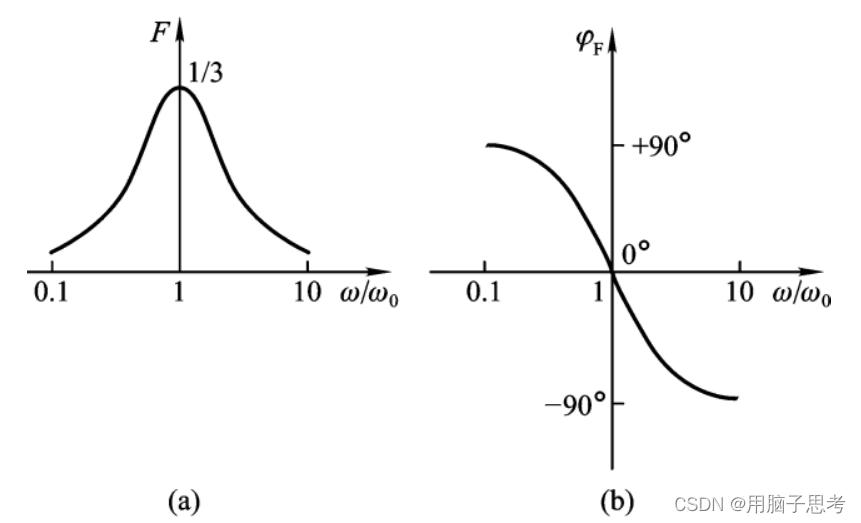
电路谐振时,,满足相位平衡
具体原理与计算可以看别的博主写的博客
刚开始我也是在CSDN上面找大佬的电路,进行复现,但亲手做之后出现了许多问题,下面进行分析
1.起振时间过长
原理图如下
我刚开始做的时候,波形怎么也出不来,也不知道啥原因,结果如下
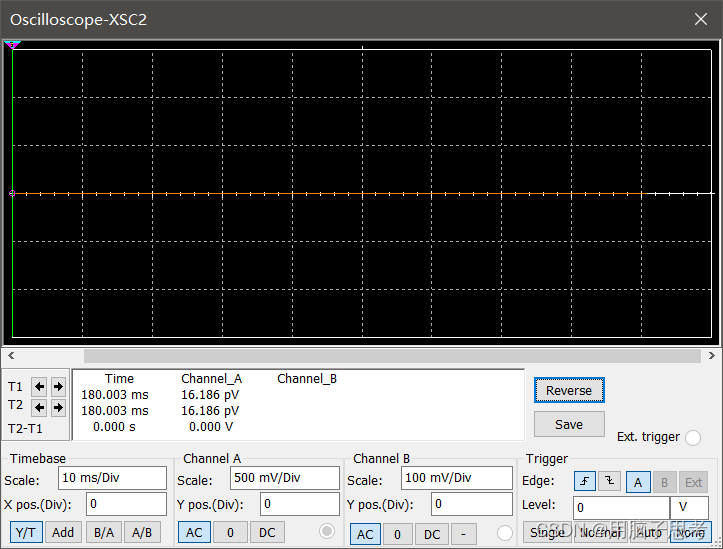
偶然一次我运行仿真,然后忘记关了,再回过头发现居然出波形了
分析原因,是因为其中的R1过小,导致起振时间太长,再加上计算机仿真计算过慢,显示的1.9s,实际要二十多秒,所以我一直以为我失败了
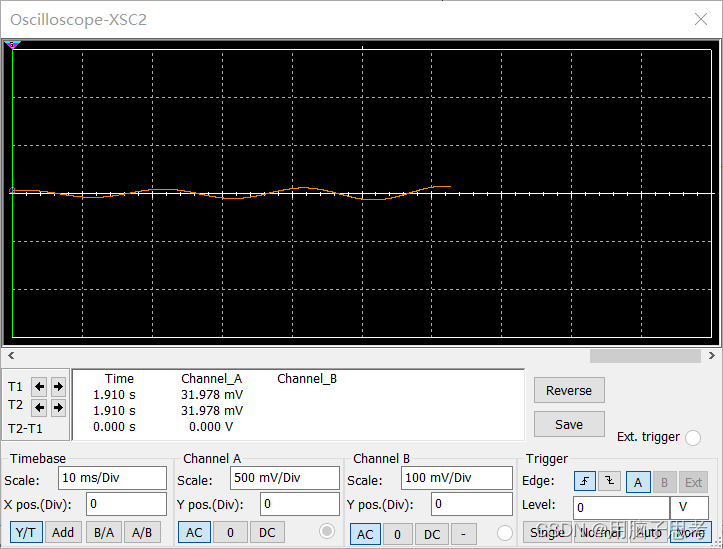
我们加大R1的阻值后,波形如下
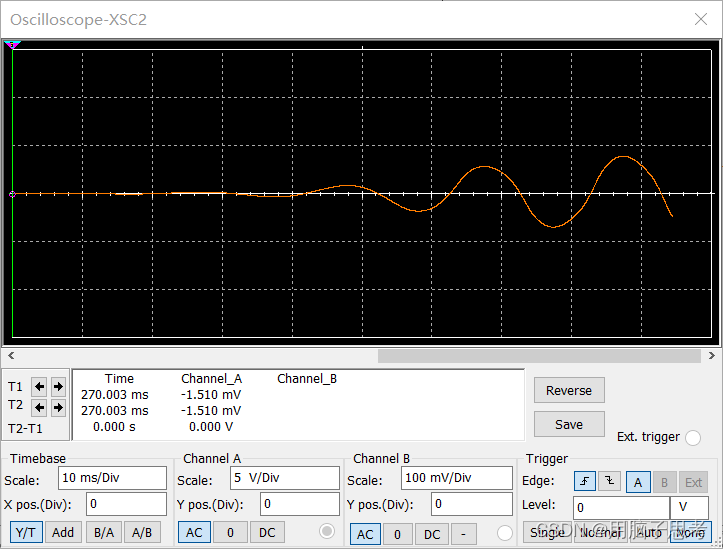
增大R1阻值后,起振时间明显变快 ,大概200多毫秒后可以明显看到电路起振。
原因:当信号较小时,二极管不导通,放大倍数随R1的增大而增大,起振时间变快
2.振荡幅度
电路图我们换回原来的
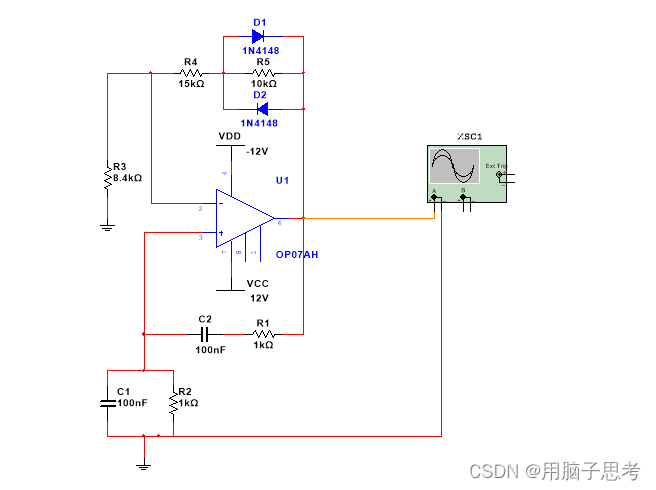
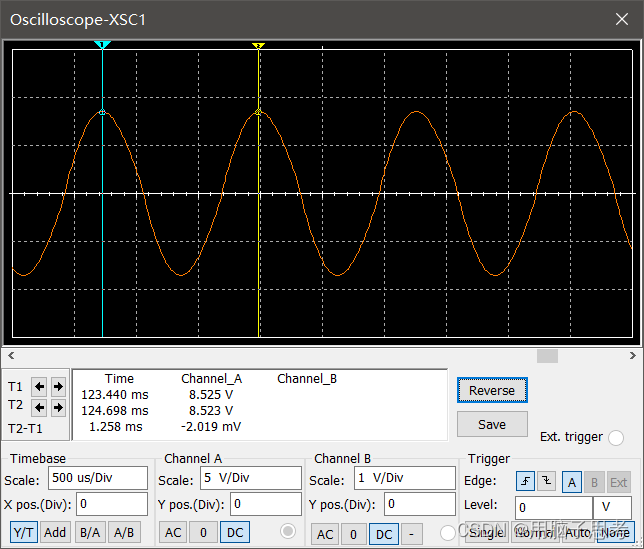
它的输出波形为
我们观察到其幅值为8.166V,我们改变R4的大小,需注意R4不能过大,R4+R5不宜过小,这里我们调小R4的阻值,改为10KΩ
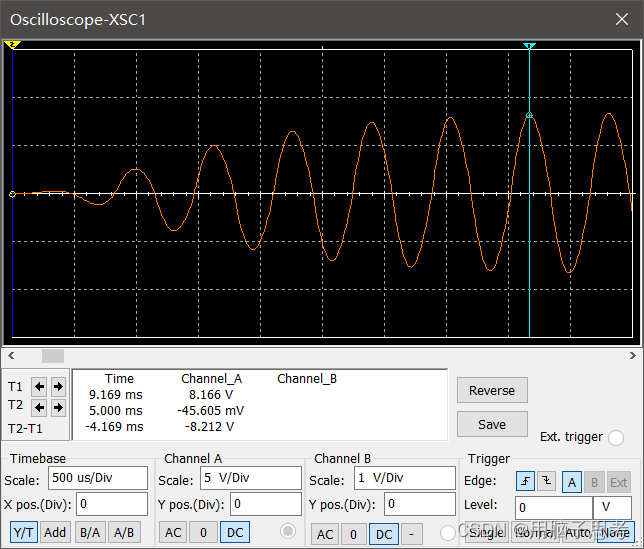
观察其波形
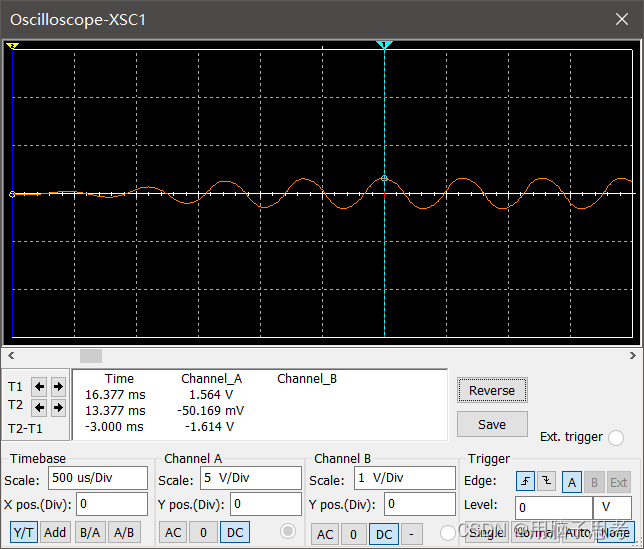
可以看到其输出幅值明显变小,为1.564V
猜想与解释,在这里我们可将二极管等效为一个电阻,它随的阻值随着压降的增大而减小
当R4上的阻值较大时,那相应的R5和二极管的并联回路的等效电阻较小,即可以看成二极管的阻值变小了很多,压降变大了许多,所以到振荡稳定时所需的时间也相应增加,故输出幅值大
当R4上的阻值较小时,那相应的R5和二极管的并联回路的等效电阻较大,二极管所需的压降不大,所以到振荡稳定时所需的时间较少,故输出信号持续放大的时间较少,故输出幅值较小
3.输出频率
前面原理已经说过了,输出频率和R2C1 、 R1C2有关,f=1/(2πRC)
电阻电容为以下值时
输出波形如下
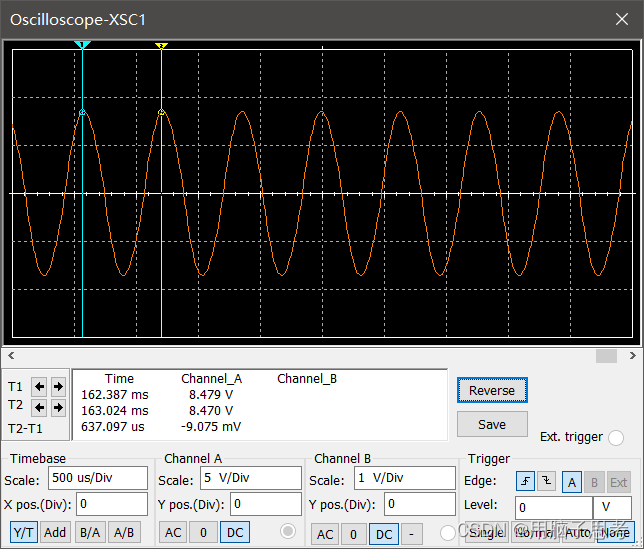
改变RC的值
得到以下波形
频率明显改变
4.单电源供电
原理图如下
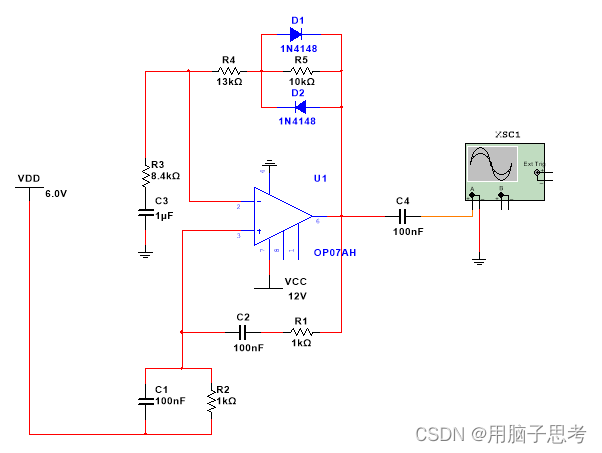
单电源供电时的输入信号如果以地作为参考,实际上也就是以供电电源的一端作为参考。例如这样的反向放大器在输入信号为正电压时,由于输出不可能低于最低供电电压,所以不能正常工作。
这里我们引入一个偏置,即图中6V的VDD(1/2VCC),相当于一个虚拟地,让输入信号以6V电压为基准进行变化,使放大后的信号能在0-VCC之间变化,信号完整输出。
同时我们在输出端在加上一个电容C4,根据电容“隔直通交”的特性,将会滤除直流成分,保留所需的交流信号。
如果不加这个电容的话,示波器负极性端可以连上6V的VDD,使输出波形同上。
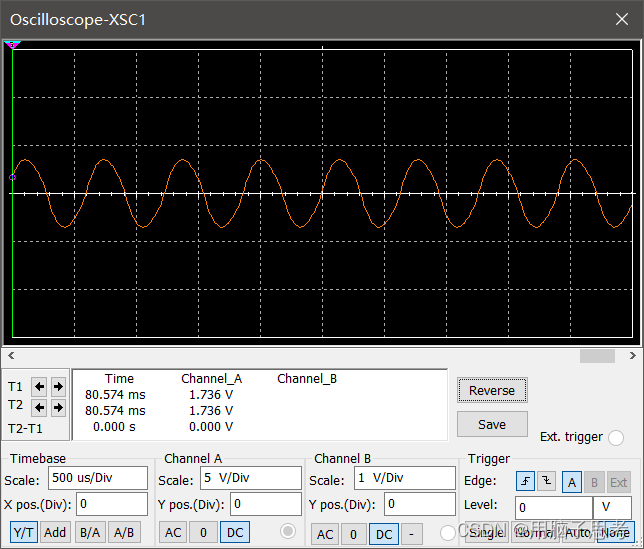
输出波形如下
在这里解释下面几点
C3的作用?
C3的作用是让直流时与公共地断开,因为放大器“虚短”的特性,同向输入端电位等于反向输入端,而交流成分和之前分析一样。
为什么R4改为13K?
因为为15K时,交流信号的变化范围超过了放大器允许的输出范围,信号失真。如果不想改R4的值,还可以将VCC变为24V,使得运放的变化范围与双电源的一样。
为什么引入6V的VDD?
这里主要是方便理解,实际电路可用电阻分压的方法,得到1/2VCC(VDD),但是采用这种方式的话还需要考虑所引起的电路参数的变化。下面链接有电阻分压式的讲解
单电源供电还可以看看下面的博主写的
以下是本次实验的仿真,欢迎交流讨论
链接:https://pan.baidu.com/s/1XNLcGWp1MXxLm9SWcl9m3g
提取码:ng9s
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
我正在使用最新版本的Rails,启动一个我将在3.1发布后部署的新应用程序,但我无法让omniauth工作。如果我只是将omniauth添加到我的Gemfile,它会bundle起来,但是当我运行rake、railss或几乎所有命令时,它会出错:nosuchfiletoload--omniauth/password有什么想法吗?是否有适用于Rails3.1的分支或分支?还是只有我遇到这个问题? 最佳答案 实际问题是bundler选择了旧版本的omniauth。为了帮助bundler选择正确的版本,请使用:gem'omniauth',
功能需求:主机使用一个串口,与两个从机进行双向通信,主机向从机发送数据,从机能够返回数据,由于结构限制,主机与从机之间只有3根线(电源、地、数据线),并且从机上没有设物理的电源开关,需要通过与主机连接的数据线来控制开机,总结如下:1、数据线只有1根2、能够双向通信3、主机能够控制从机开机4、主机可以单独向1个从机发数据,也可以同时向两个从机发送数据根据需求,设计出如下电路:工作原理分析:VCC_24V_IN、GND、LINE_L(LINE_R)三根线接线连接到从机,电源开启电路是从机内部的电源控制。开机的逻辑:*主机先上电,LINE_L因为主机的R1上拉而有高电平,使Q6导通,Q5的G极电压被
我想自动化这个场景。用户A将一个项目分配给用户B,用户B收到一条警告消息。为此,我想用不同的帐户启动两个不同的浏览器来测试这种交互。有可能这样做吗?如果是,如何? 最佳答案 看起来这个问题已经在我的示例代码中得到了回答:http://stackoverflow.com/questions/213430/selenium-rc-run-tests-in-multiple-browsers-automatically。firefox=Selenium::SeleniumDriver.new("localhost",4444,'*fire
所以,我已经开始创建一些使用SeleniumRC的Ruby单元测试。直接在浏览器中测试我的网络应用程序。我正在使用Selenum-Client对于ruby。我已经为所有其他selenium测试创建了一个基类来继承。这会创建许多SeleniumDriver实例,并且会在每个实例上调用所有缺少的方法。这实质上是并行运行测试。其他人是如何实现自动化的?这是我的实现:classSeleniumTest这行得通,但如果一个浏览器失败,整个测试就会失败,并且无法知道它在哪个浏览器上失败。 最佳答案 你试过了吗SeleniumGrid?我认为它创
如何切换回来?我安装了RVM,然后安装了Ruby1.9.3,然后运行geminstallrails。运行rails-v我可以看到我有Rails4.0.0.rc1但我不想使用该版本,因为我的主机不支持它供应商。如何安装Rails3.2.13并在运行railsnew命令时将其用作默认值? 最佳答案 尝试:gemuninstallrailsgeminstallrails--version"=3.2.13" 关于ruby-on-rails-使用geminstallrails,现在我有4.0.
在C中使用OpenSSL时,我们在上下文中设置选项以删除SSLv2和SSLv3等薄弱和受伤的协议(protocol)。来自ssl.h,这里是一些有用选项的位掩码:#defineSSL_OP_NO_SSLv20x01000000L#defineSSL_OP_NO_SSLv30x02000000L#defineSSL_OP_NO_TLSv10x04000000L#defineSSL_OP_NO_TLSv1_20x08000000L#defineSSL_OP_NO_TLSv1_10x10000000L但是,我在Ruby中设置它们时遇到了问题:ifuri.scheme=="https"http
1、单片机控制液晶显示模块1602LCD的显示。液晶显示器(LiquidCrystalDisplay,LCD)具有省电、体积小、抗干扰能力强等优点,LCD显示器分为字段型、字符型和点阵图形型。(1)字段型。以长条状组成字符显示,主要用于数字显示,也可用于显示西文字母或某些字符,广泛用于电子表、计算器、数字仪表中。(2)字符型。专门用于显示字母、数字、符号等。一个字符由5、7或5、10的点阵组成,在单片机系统中已广泛使用(3)点阵图形型。广泛用于图形显示,如笔记本电脑、彩色电视和游戏机等。它是在平板上排列的多行列的矩阵式的晶格点,点大小与多少决定了显示的清晰度。引脚包括8条数据线、3条控制线和3