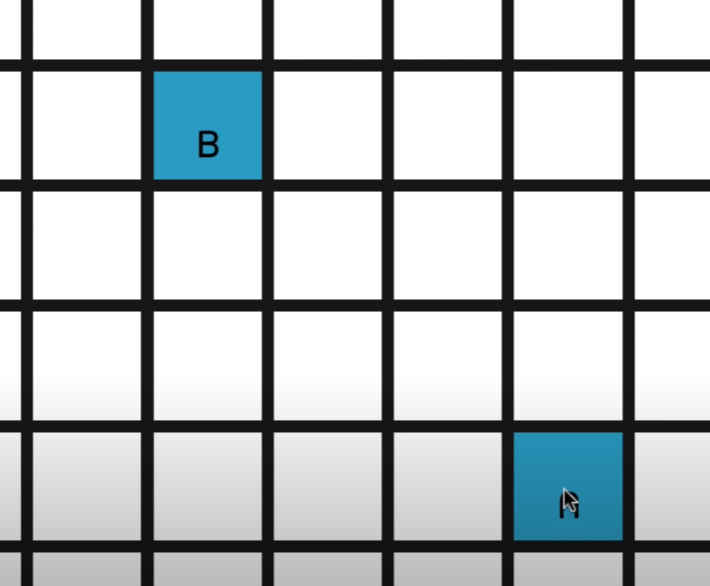
如果现在地图上存在两点A、B,这里设A为起点,B为目标点(终点)
这里为每一个地图节点定义了三个值
gCost:距离起点的Cost(距离)
hCost:距离目标点的Cost(距离)
fCost:gCost和gCost之和。
这里的Cost可以采用直线距离,也可以采用曼哈顿距离等,只要适合就行
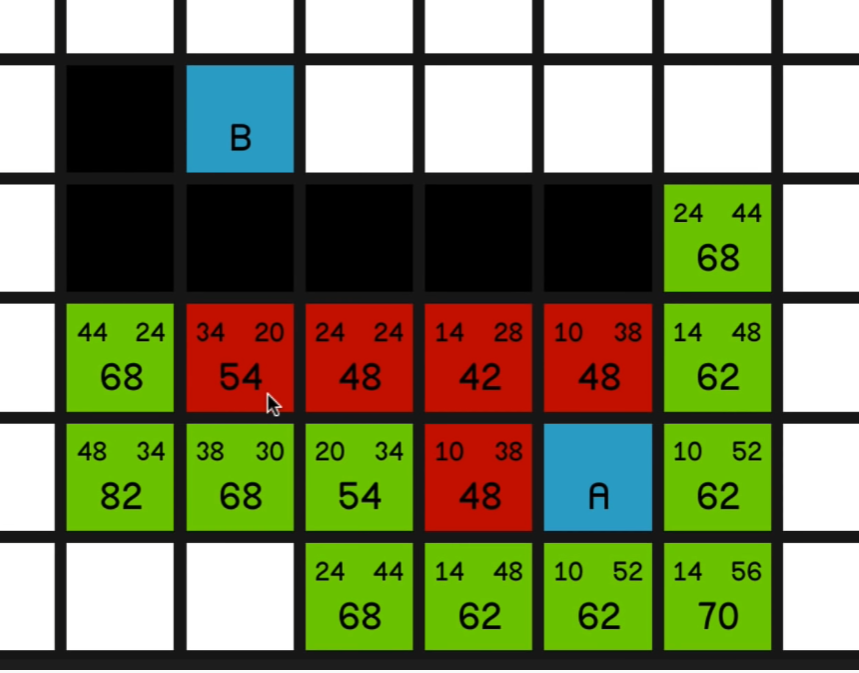
那么先计算起点周围的所有节点的三个值
这里设每两个相邻节点间的距离为10,那么对角线距离为14
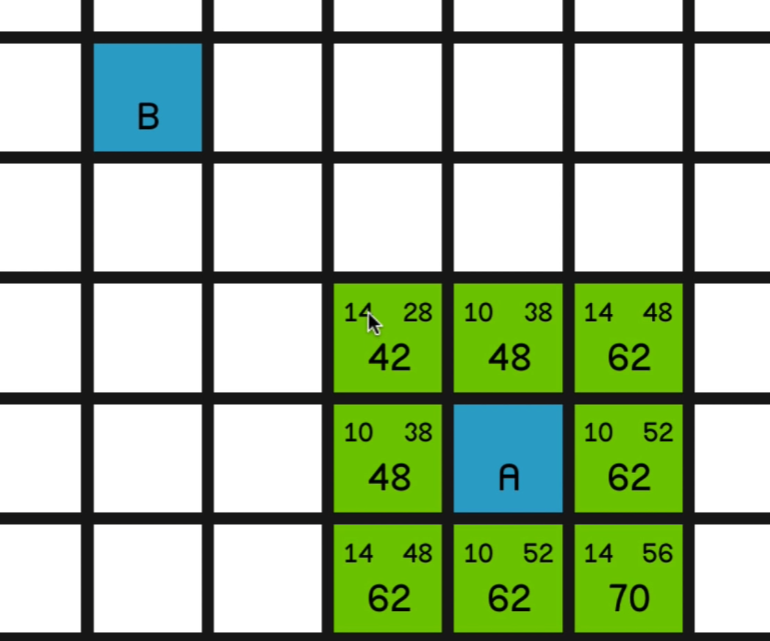
那么计算得出,F值最小的是A点左上角的方块,将节点放入列表(数组也行)将A设为该节点的父节点,然后计算周围方块的距离
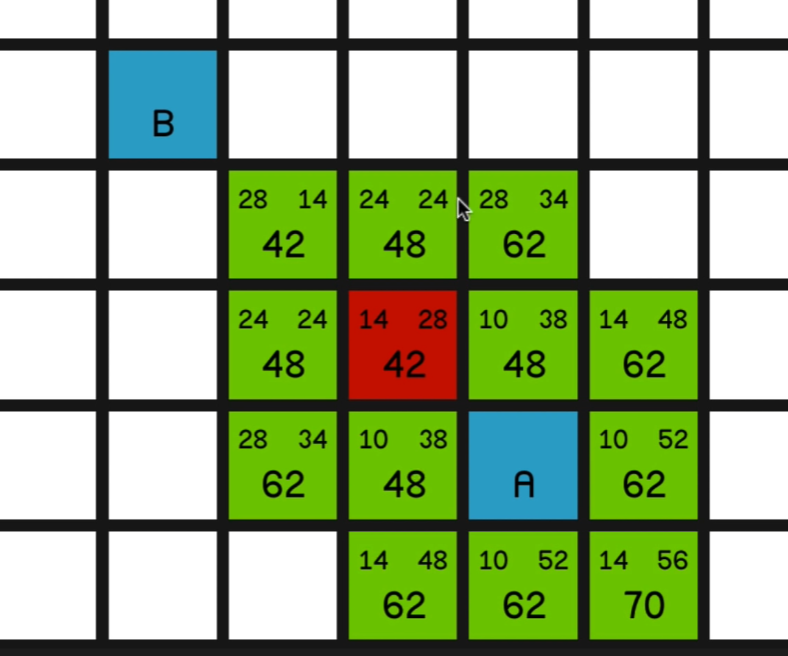
因为是从A点移动过来的,所以下次比较时不再比较A点
再次计算得出F值最小的仍然为左上角的节点

这样就求出了A到B点的最短路径
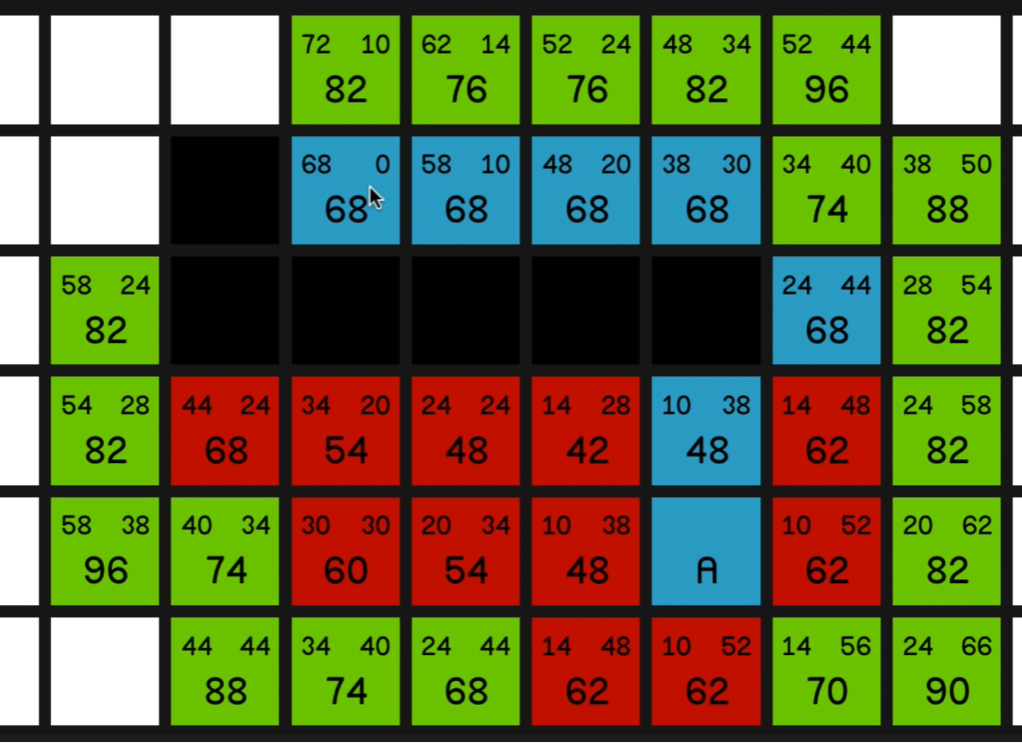
如果A、B之间存在障碍物那么又该怎么办呢?
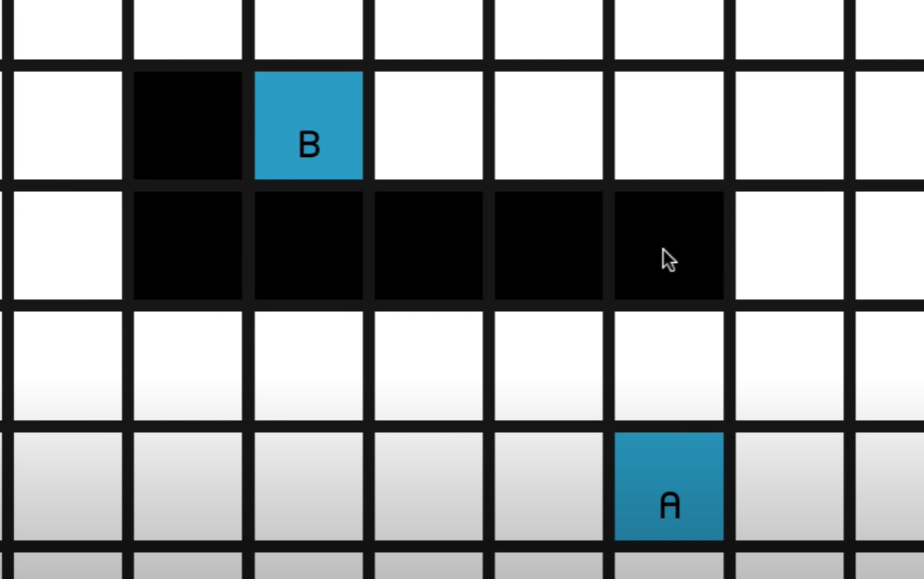
同样也是计算最小的 F 值
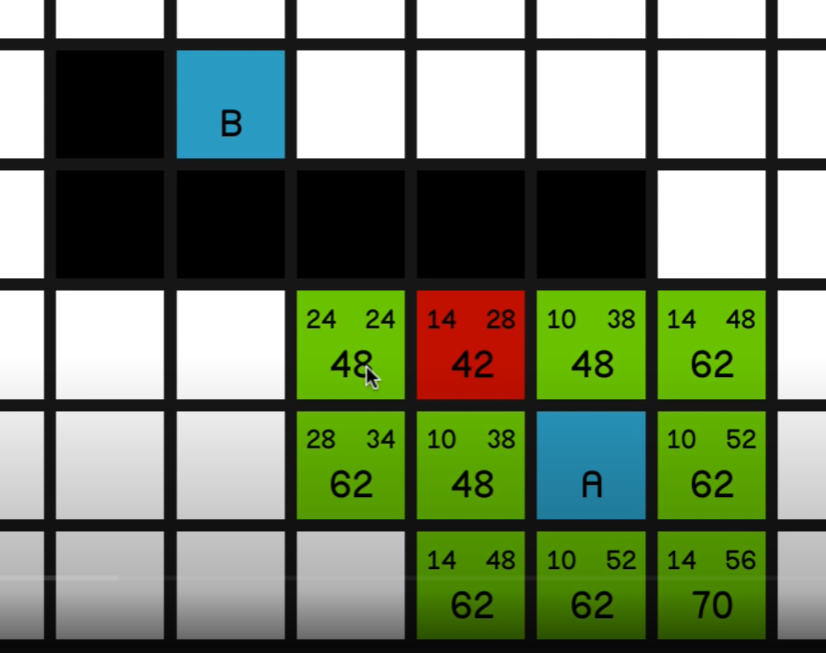
但这里出现了三个相同的F值
那么接下来优先选择 H 值最小的路径,即距离目标点最近的路径
但是移动过后 F 值 反而变大了
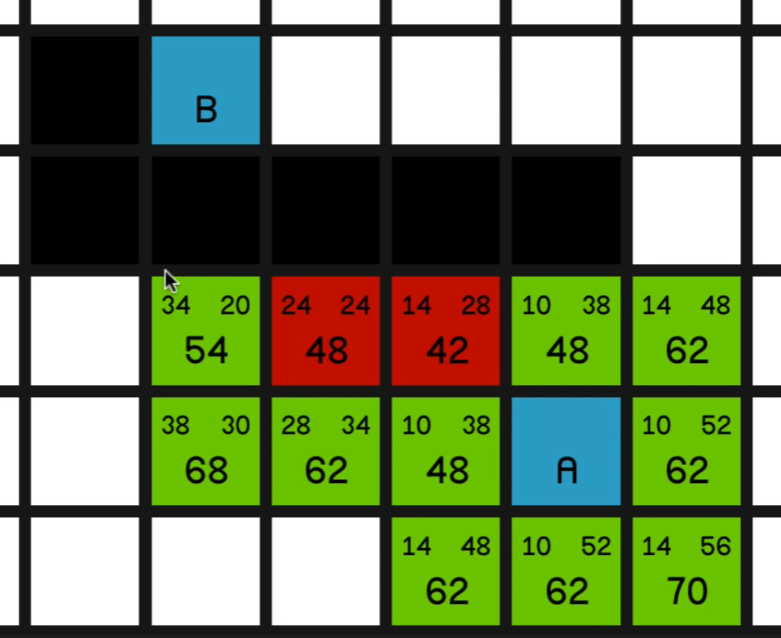
那么反过来寻找之前 F 值最小的路径,但接下来还是 F 值更大
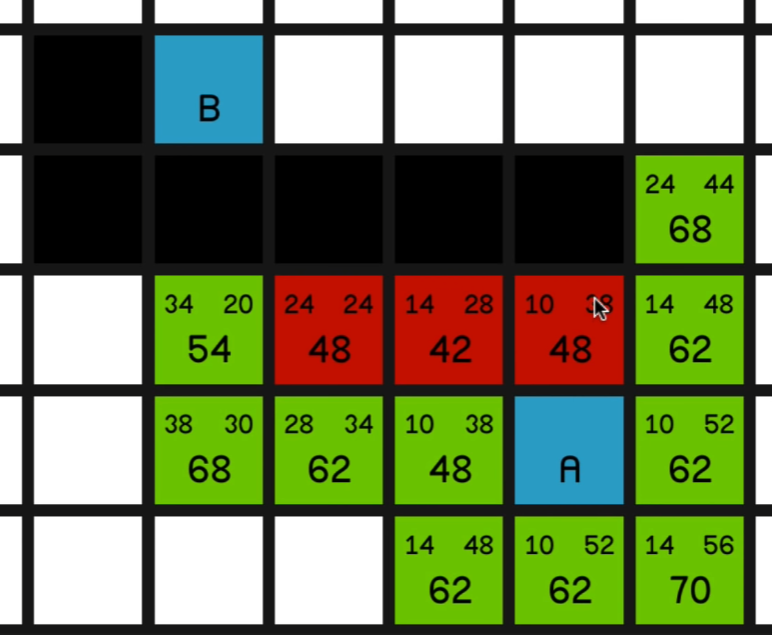
那么仍然选择 F 值最小的路径
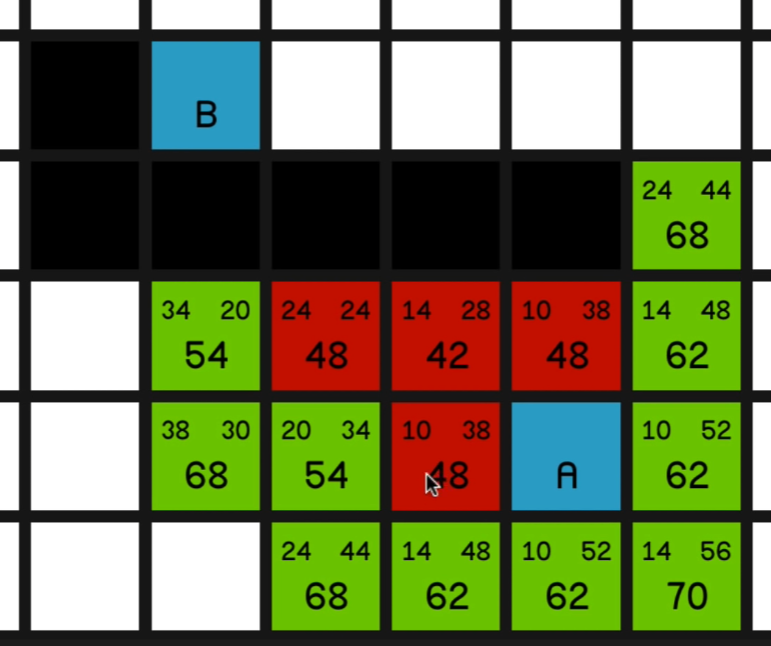
然后是下一个F值最小的路径
然后是下一个
直到距离目的地的hCost为0

第一次计算A点周围节点的F值后,找出最小的那个,将节点的父节点设为A点
再次计算,将周围节点设为子节点,然后后发现周围有两个58的点,选中gCost更小也就是下面A旁边那个58的点
再次计算
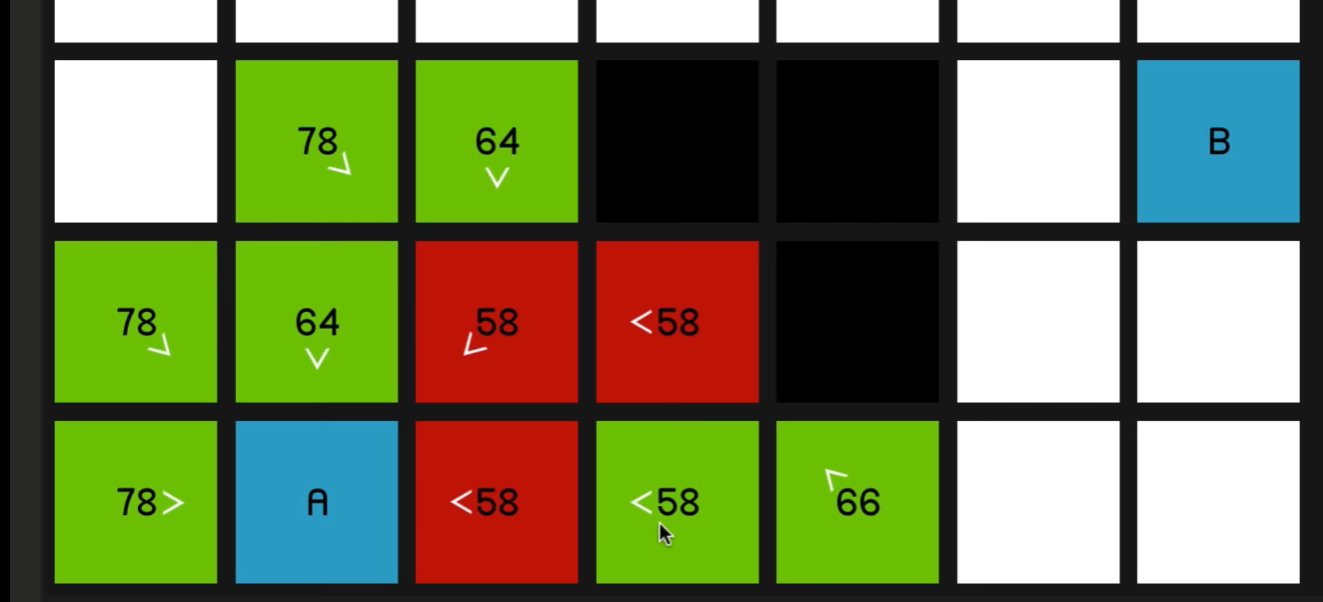
在计算过下面那个58节点后发现旁边节点从这里经过所需的cost更小,所以重新设置父节点
如果经过黄线的路径,右下角节点的Cost会达到66

如果经过下面到达,Cost为58,会更小,会重新设置父节点
这里重新计算的fCost为 A — 58 — 58,fCost为58更小,说明新路径更小,重新设置父节点
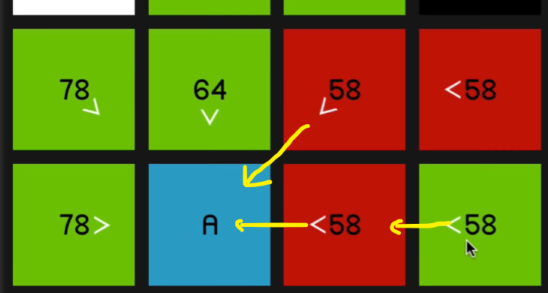
按照此方法循环直至找到目标点
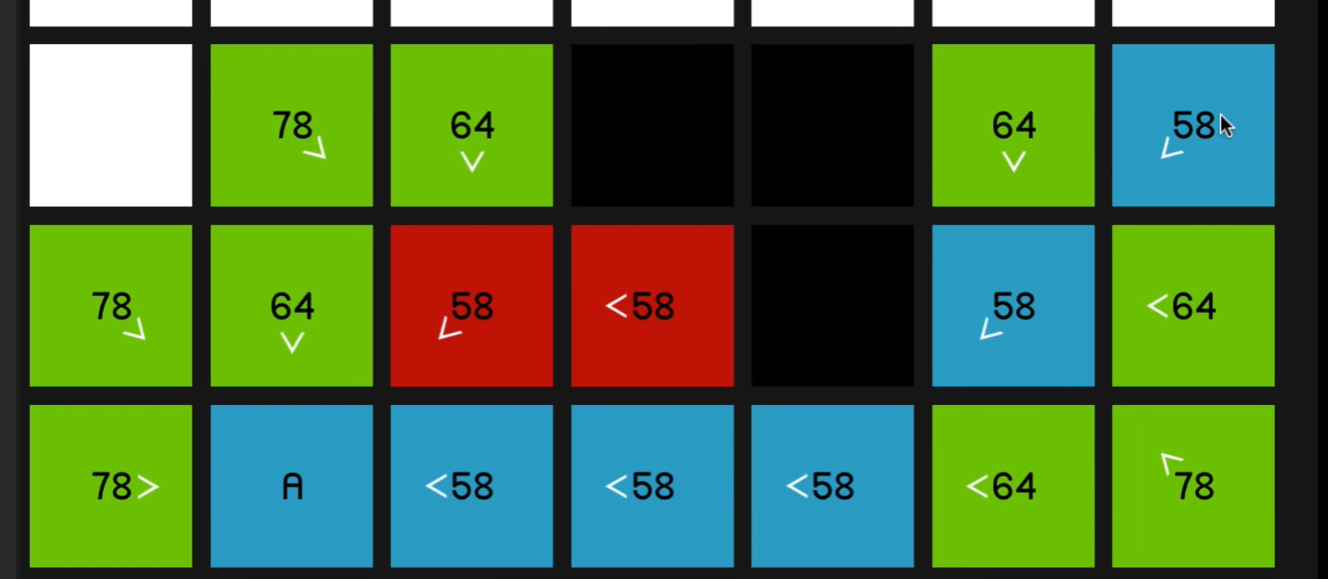
因为设置了父节点(图中箭头表示),那么只需要从目标点开始,一直获取父节点即可,将获取到的所有节点存储进列表或数组然后进行翻转,就得到了A-B的最短路径
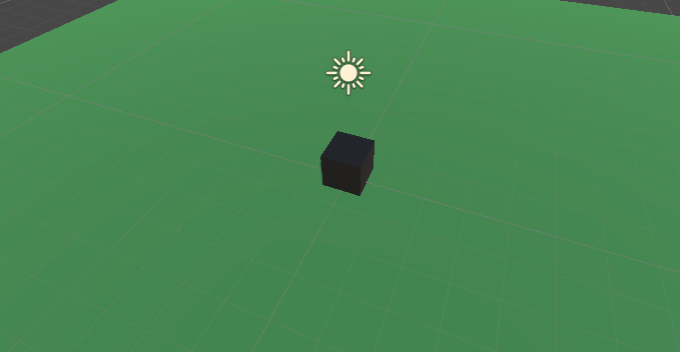
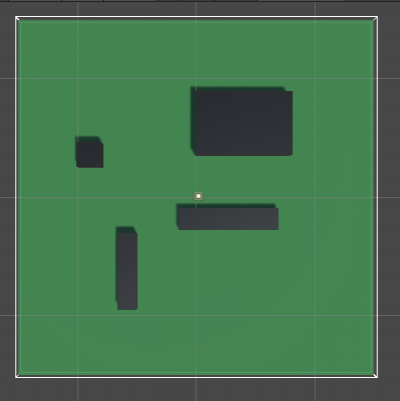
然后添加Cuble视为障碍物
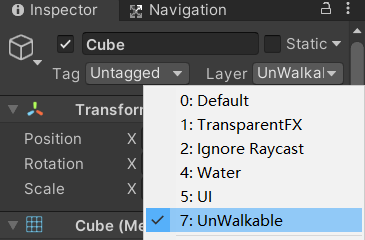
将Cube的层级设为UnWalkable
接着复制几个

新建脚本Node,节点目前只包含坐标位置,和是否能行走
public class Node
{
public bool walkable; //节点是否能走动
public Vector3 worldPos; //节点的空间坐标
public Node(bool _walkable, Vector3 _worldPos) //构造器
{
walkable = _walkable;
worldPos = _worldPos;
}
}
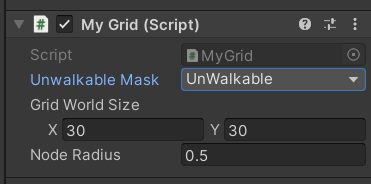
新建脚本MyGrid,添加到新建空物体A*上
public class MyGrid : MonoBehaviour
{
public LayerMask unwalkableMask; //节点是否能走动
public Vector2 gridWorldSize; //地图的范围,节点在地图内创建
public float nodeRadius; //节点的大小
Node[,] grid; //节点数组
private void OnDrawGizmos()
{
//首先画出地图的范围 //宽度 厚度 长度
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
}
}
然后设置节点地图大小
继续修改MyGrid
public class MyGrid : MonoBehaviour
{
public LayerMask unwalkableMask; //是否能行走
public Vector2 gridWorldSize; //需要寻路的地图大小
public float nodeRadius; //节点半径
Node[,] grid; //节点
float nodeDiameter; //节点的直径
int gridSizeX, gridSizeY;
void Start()
{
nodeDiameter = nodeRadius * 2;
gridSizeX = Mathf.RoundToInt(gridWorldSize.x / nodeDiameter); //计算出x轴方向有多少个节点
gridSizeY = Mathf.RoundToInt(gridWorldSize.y / nodeDiameter); //计算出z轴方向有多少个节点
CreateGrid();
}
void CreateGrid()
{
grid = new Node[gridSizeX, gridSizeY]; //初始化节点数组
//计算网格的起始点(原点)
Vector3 worldButtonLeft = transform.position
- Vector3.right * gridWorldSize.x / 2
- Vector3.forward * gridWorldSize.y / 2;
for (int x = 0; x < gridSizeX; x++)
{
for (int y = 0; y < gridSizeY; y++)
{
//计算节点的空间坐标
Vector3 worldPoint = worldButtonLeft
+ Vector3.right * (x * nodeDiameter + nodeRadius)
+ Vector3.forward * (y * nodeDiameter + nodeRadius);
//判断节点是否能行走,根据节点范围是否与障碍物碰撞
bool walkable = !(Physics.CheckSphere(worldPoint, nodeRadius, unwalkableMask));
grid[x, y] = new Node(walkable, worldPoint); //将节点的数据添加进二位数组
}
}
}
private void OnDrawGizmos()
{
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
if (grid != null)
{
foreach (Node node in grid)
{
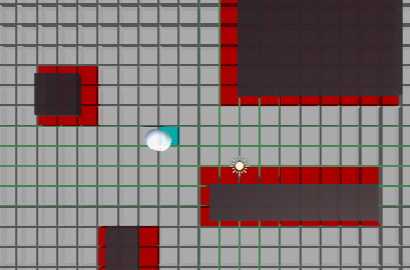
//绘制出所有节点,可以行走为白色,不能行走为红色
Gizmos.color = (node.walkable) ? Color.white : Color.red;
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));//减少Gizmos方块的大小便于观察
}
}
}
}
运行结果
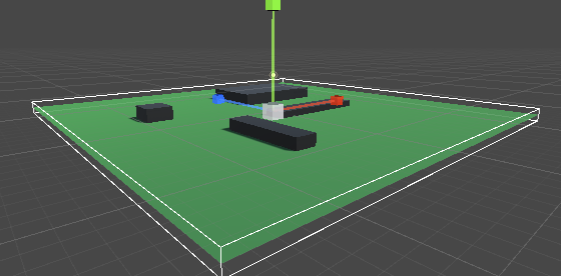
接下来添加一个起点和一个终点
新建两个Capsule

那么如何知道起点现在在哪个节点呢?
继续修改MyGrid
public class MyGrid : MonoBehaviour
{
......
public Node NodeFromWorldPos(Vector3 worldPos) //这里传入起点的位置
{
//这里 percentX 和 percentY 计算起点位置占地图区域横竖坐标的比例
float percentX = (worldPos.x + gridWorldSize.x / 2) / gridWorldSize.x;
float percentY = (worldPos.z + gridWorldSize.y / 2) / gridWorldSize.y;
//将起点的位置限定在地图范围之内
percentX = Mathf.Clamp01(percentX);
percentY = Mathf.Clamp01(percentY);
//总节点数量 * 所在区域比例 = 在第几个节点, -1 是为了从 0 开始计算,因为0也有一个节点
int x = Mathf.RoundToInt((gridSizeX - 1) * percentX);
int y = Mathf.RoundToInt((gridSizeY - 1) * percentY);
return grid[x, y];
}
private void OnDrawGizmos()
{
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
if (grid != null)
{
//计算出起点的位置
Node playerNode = NodeFromWorldPos(player.position);
foreach (Node node in grid)
{
Gizmos.color = (node.walkable) ? Color.white : Color.red;
if (playerNode == node) //设置起点位置节点的颜色
{
Gizmos.color = Color.cyan;
}
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
}
}
运行结果
修改Node
public class Node
{
......
public int gridX; //地图中x方向第几个节点
public int gridY; //地图中y方向第几个节点
public int gCost; //g值
public int hCost; //h值
public Node parent; //父节点,最后用于存储实际路径
//重新添加了两个参数,便于计算邻近节点
public Node(bool _walkable, Vector3 _worldPos,int _gridX, int _gridY)
{
walkable = _walkable;
worldPos = _worldPos;
gridX = _gridX;
gridY = _gridY;
}
public int FCost //属性,F值
{
get
{
return gCost + hCost;
}
}
}
新建脚本PathFinding,并添加到物体A*上
public class PathFinding : MonoBehaviour
{
public Transform seeker, target; //声明两个坐标,起始点和目标点
private MyGrid grid;
......
private void Update()
{
FindPath(seeker.position, target.position); //计算路径
}
private void FindPath(Vector3 startPos, Vector3 targetPos)
{
Node startNode = grid.NodeFromWorldPos(startPos); //输入空间坐标,计算出起始点处于哪个节点位置
Node targwtNode = grid.NodeFromWorldPos(targetPos); //输入空间坐标,计算出目标点处于哪个节点位置
List<Node> openSet = new List<Node>(); //用于存储需要评估的节点
HashSet<Node> closedSet = new HashSet<Node>(); //用于存储已经评估的节点
openSet.Add(startNode); //将起始点加入openSet,进行评估
while (openSet.Count > 0) //如果还有待评估的节点
{
#region //获取待评估列表中 F 值最小的节点
Node currentNode = openSet[0]; //获取其中一个待评估的节点
for (int i = 0; i < openSet.Count; i++) //将该节点与所有待评估的节点比较,找出 F 值 最小的节点,F
//值相同就h值更小的节点
{
if (openSet[i].FCost < currentNode.FCost
|| openSet[i].FCost == currentNode.FCost
&& openSet[i].hCost < currentNode.hCost)
{
currentNode = openSet[i];
}
}
#endregion
openSet.Remove(currentNode); //待评估节点中去掉 F 值最小的节点
closedSet.Add(currentNode); //将该节点加入已评估的节点,之后不再参与评估
if (currentNode == targwtNode) //如果该节点为目标终点,就计算出实际路径并结束循环
{
RetracePath(startNode, targwtNode);
return;
}
//如果该节点不是目标点,遍历该点周围的所有节点
foreach (Node neighbor in grid.GetNeighbors(currentNode))
{
//如果周围某节点不能行走 或 周围某节点已经评估,为上一个节点,则跳过
// 说明某节点已经设置父节点
if (!neighbor.walkable || closedSet.Contains(neighbor))
{
continue;
}
//计算前起始点前往某节点的 gCost 值,起始点的 gCost 值就是0
//经过循环这里会计算周围所有节点的g值
int newMovementCostToNeighbor = currentNode.gCost + GetDinstance(currentNode, neighbor);
//如果新路线 gCost 值更小(更近), 或 某节点没有评估过(为全新的节点)
if (newMovementCostToNeighbor < neighbor.gCost || !openSet.Contains(neighbor))
{
neighbor.gCost = newMovementCostToNeighbor; //计算某节点gCost
neighbor.hCost = GetDinstance(neighbor, targwtNode); //计算某节点hCost
neighbor.parent = currentNode; //将中间节点设为某节点的父节点
//如果存在某节点gCost更小的节点,会重新将中间节点设为某节点父节点
if (!openSet.Contains(neighbor)) //如果某节点没有评估过
{
openSet.Add(neighbor); //将某节点加入待评估列表,在下一次循环进行评估,
//下一次循环又会找出这些周围节点 F 值最小的节点
}
}
}
}
}
private void RetracePath(Node startNode, Node endNode) //获取实际路径
{
List<Node> path = new List<Node>();
Node currentNode = endNode;
while (currentNode != startNode) //如果当前不为目标点
{
path.Add(currentNode); //将当前节点加入路径
currentNode = currentNode.parent;//获取下一个节点(当前节点的父节点)
}
path.Reverse(); //反转所有元素的顺序
grid.path = path; //返回实际路径
}
private int GetDinstance(Node nodeA, Node nodeB) //计算两个节点间的cost
{
int dstX = Mathf.Abs(nodeA.gridX - nodeB.gridX);
int dstY = Mathf.Abs(nodeA.gridY - nodeB.gridY);
if (dstX > dstY)
{
return 14 * dstY + 10 * (dstX - dstY);
}
return 14 * dstX + 10 * (dstY - dstX);
}
}
修改脚本MyGrid
public class MyGrid : MonoBehaviour
{
......
public List<Node> path;
......
void CreateGrid()
{
......
for (int x = 0; x < gridSizeX; x++)
{
for (int y = 0; y < gridSizeY; y++)
{
...... //多了两个参数,方便计算周围节点
grid[x, y] = new Node(walkable, worldPoint, x, y); //将节点的数据添加进二位数组
}
}
}
......
public List<Node> GetNeighbors(Node node) //获取节点周围的所有节点
{
List<Node> neighbors = new List<Node>();
//节点的相对坐标左侧为x-1,右侧为x+1,下方y-1,上方y+1
for (int x = -1; x <= 1; x++)
{
for (int y = -1; y <= 1; y++)
{
if (x == 0 && y == 0) //跳过中间的节点
{
continue;
}
//从x、y相对于中间节点的坐标 加上 中间节点位于地图的坐标,得到了周围节点位于地图的坐标
int checkX = node.gridX + x;
int checkY = node.gridY + y;
//限定节点范围,防止出现地图外的不存在的节点
if (checkX >= 0 && checkX < gridSizeX && checkY >= 0 && checkY < gridSizeY)
{
neighbors.Add(grid[checkX, checkY]);//添加周围节点
}
}
}
return neighbors;
}
private void OnDrawGizmos()
{
......
if (path != null)
{
if (path.Contains(node)) //给路径添加颜色
{
Gizmos.color = Color.yellow;
}
}
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
}
}
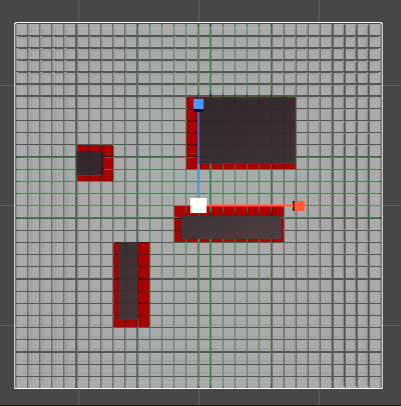
自行在Inspector面板中设置相应的参数
运行结果
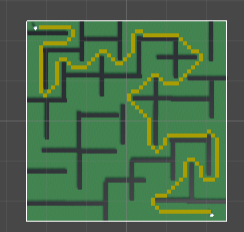
可以随时修改起点和终点的位置
演示视频:https://www.bilibili.com/video/BV14B4y127YN/
下一篇 A*寻路算法2.0 将使用数组实现堆来代替List列表存储节点,算法消耗的时间将减少约60%
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
目录1.AdmobSDK下载地址2.将下载好的unityPackagesdk导入到unity里编辑 3.解析依赖到项目中
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总