前文不断强调,进行磁场定向控制需要控制的是电流而非电压,只是因为我们没有办法直接去控制电流才暂时退而求其次地去控制电压 。虽然电压控制的效果也还不错,但由于电机不是单纯的阻性负载,所以控制电压并不能得到一个完美的效果。终极目标是控制电流,没有电流控制的foc不能叫foc,所以电流环最本质的作用是什么就不用多说了吧。

注:虽然框图中含有编码器,但它并不是电压控制的反馈环节,仅用来获取转子电角度,所以称其为开环控制。

对于其他方面的作用,说一说自己的理解:
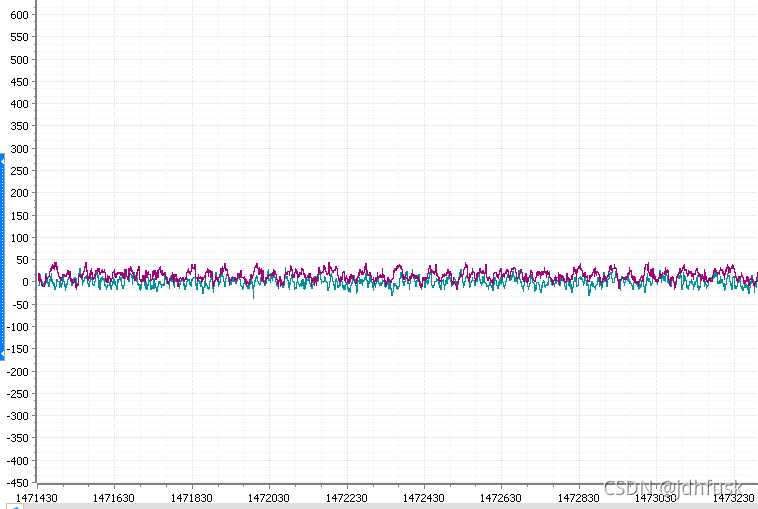
使用电压开环控制时,由于种种原因,id并不是一直为0,可能存在偏移或是跳动,转速越高这种情况就越厉害,而使用电流闭环可以较好地遏制这种现象。
下面两张图显示了在20V供电下,某台电机空载全速转动下的id和iq波形,其中蓝色的是id。第一张图使用电压开环控制,第二张图使用电流闭环控制。

当电机堵转的时候,电流等于电压除以电阻。假如电压是12V,电机内阻是0.1欧姆,那么此时流过电机的电流就是120安培。如果电机的额定电流只有10安培,那么它很有可能在1秒钟之内冒烟烧掉,同时120安培的大电流对于小型驱动板而言也是致命的。我们可以在硬件上增加过流保护的功能,当触发过流保护时直接关断三相全桥。但我们想要的是限流,尽可能地将电机流过的电流限制在给定值之下,而不是达到阈值就关断电机,因此硬件上的过流保护只是作为最后一道保护措施,真正的限流通常是由软件上的电流环来实现。将电机的电流限死在额定电流之下,这样即使电机堵转也不用担心烧毁电机或是驱动器。
电机的输出转矩和电流基本上是成正比的,因此控制了电流也就相当于控制了电机的输出转矩。(这里也再次强调一下,要让电机输出转矩是需要给它添加负载的。如果电机空载,那么它的输出转矩只需要克服摩擦力和空气阻力等,此时的输出转矩是非常小的。所以这里说的控制电机的输出转矩,其实是控制电机的最大输出转矩,也就是堵转时的转矩。)
由前文的控制框图可知,实现电流环需要做这么几件事情:①电机三相电流采集②克拉克变换③帕克变换④电流环PID运算。
电流采样是属于硬件部分的内容,这里只做一些简单的介绍,后续如果有机会也会出几期关于硬件的文章。
电流采样的方案大致有电流互感和电阻采样两种,而电阻采样又分为低端采样、母线采样和高端采样。对于电阻采样而言无论是哪一种,其原理都是一样的,根据欧姆定律可得电流等于电压除以电阻。由于电阻阻值是我们给定的,所以只要采集了电阻两端的电压就可以算出流过电阻的电流。为了尽可能的不影响电路正常工作,我们选用的采样电阻的阻值一般都会很小(毫欧级),所以电阻两端的电压往往会比较小,比如10毫欧的电阻,流过10安培的电流,其两端电压仅为100毫伏,因此我们需要运算放大器来放大这个电压信号,最后送给单片机的ADC。
最终的换算公式如下:(3.3V的参考电压,12位的ADC,电流单位安培,电阻单位欧姆)
电
流
=
A
D
C
原
始
值
/
4096
∗
3.3
/
采
样
电
阻
阻
值
/
运
放
放
大
倍
数
电流 = ADC原始值 / 4096 * 3.3 / 采样电阻阻值 / 运放放大倍数
电流=ADC原始值/4096∗3.3/采样电阻阻值/运放放大倍数
这里也提几个关键的地方:①对于低端采样,一定要在采样电阻对应的下桥臂开启的时候采样,否则下桥臂关断的时候几乎不会有电流流过采样电阻(高端采样也类似)②对于母线采样,任何时候都有电流流过采样电阻,但这并不意味着任何时间点都可以采样,一定要避开mos管开启或关断的瞬间,否则会采集到非常严重的尖峰噪声(这个原则对于高端和低端采样也适用)。③电流采样的效果会直接影响到电流环的控制效果,因此万万不可马虎。
前文已经讲过它们的反变换,这里不多废话了,两个变换加起来也就四句代码:
void Clarke_Park(struct MOTO_Type * moto, int32_t currA, int32_t currC)
{
moto->iAlpha = (float32_t)currA;
moto->iBeta = -(float32_t)(currA + 2 * currC) * 0.5773502692f;
moto->id = moto->iAlpha * moto->cosVal + moto->iBeta * moto->sinVal;
moto->iq = -moto->iAlpha * moto->sinVal + moto->iBeta * moto->cosVal;
}
为什么只需要两相电流而不是三相呢?因为三相电流之和等于0,知道两相可以倒推出第三相。为什么我这里用的是A相和C相的电流呢?一方面是有时候要方便板子布线,另一方面是用AB相的很多,这里介绍一下其他的,希望大家学会灵活运用。如果对具体的推导过程有兴趣的可以观看硬石专题8第6第7小节,链接已放在底部。
首先要明确一点,对于电流环而言一般是不会使用微分项D的,这个不是我说的,而是查阅了一些相关资料(包括ti的公开课,一些开源方案的源码)找到的结论。
经过克拉克变换以及帕克变换,我们的三相交流电流量已经变成了两个直流的电流量,因此可以很容易的使用PID去控制它。PID相信大家都非常熟悉,而去掉了D项就更简单了:
void Curr_PI_Cal(struct PI_Type *PI_Control, float32_t target, float32_t resultMax)
{
PI_Control->target = target;
PI_Control->error = PI_Control->target - PI_Control->value; //误差等于目标值减去测量值
PI_Control->errSum += PI_Control->error * PI_Control->ki; //积分项累加
if(PI_Control->errSum > PI_Control->errSumMax) //积分限幅
PI_Control->errSum = PI_Control->errSumMax;
else if(PI_Control->errSum < -PI_Control->errSumMax)
PI_Control->errSum = -PI_Control->errSumMax;
PI_Control->result = PI_Control->kp * PI_Control->error + PI_Control->errSum; //得到PI运算结果
if(PI_Control->result > resultMax) //最大输出限幅
PI_Control->result = resultMax;
else if(PI_Control->result < -resultMax)
PI_Control->result = -resultMax;
}
这里有一个地方可能和大家以往用的不太一样:
PI_Control->result = PI_Control->kp * PI_Control->error + PI_Control->errSum;
PI_Control->result = PI_Control->kp * PI_Control->error + PI_Control->ki * PI_Control->errSum;
用下面这种的应该会多一些,但这种形式有个缺点就是它的积分限幅值是会随着 ki 的调整而变化,并且不直观,你也不知道限幅了多少。因此推荐使用上面这种形式,先将整个积分项不停地累加起来,再对其限幅。因为电流环的输入是电流id、iq,输出是电压ud、uq,而我们的ud、uq是受限于供电电压的,你不可能给你的驱动板供电12V却让它输出20V,过大的积分限幅是完全没有意义的,只会让你的电流环严重超调,而过小的限幅会让你的电机发挥不出力量,比如你的驱动板是12V供电,却只能达到6V的效果。那么多大的限幅是合适的呢,还记得前文介绍svpwm说的最大不失真电压Uref吗?
U
r
e
f
≤
3
3
×
U
d
c
Uref \leq \frac{\sqrt{3}}{3} \times Udc
Uref≤33×Udc
积分限幅就可以通过这个公式算出来,比方说12V供电,那么积分限幅值就可以取6.93。同样的,代码最下边的 resultMax 也取这个数。
这里也温馨提示一下,Uref是通过ud和uq两个矢量合成的,所以要让Uref小于限幅值,并非仅让ud、uq分别小于限幅值就够了。
同样先明确几点:①对于普通的无刷电机,id给定值为零②调试时先调D轴的PI参数,如果效果满意,就把D轴的PI参数原封不动的赋给Q轴。
电流环的PI参数是可以算出来的,只要知道了电机的电阻和电感,就能得到这台电机的电流环PI参数。具体的推导过程可以参考下面链接的第一个视频,这里只说结论。
对于串联型的PI控制器:
K
p
=
L
×
b
a
n
d
w
i
d
t
h
×
2
π
Kp = L\times bandwidth\times2\pi
Kp=L×bandwidth×2π
K i = R ÷ L Ki = R \div L Ki=R÷L
对于并联型的PI控制器:
K
p
=
L
×
b
a
n
d
w
i
d
t
h
×
2
π
Kp = L\times bandwidth\times2\pi
Kp=L×bandwidth×2π
K i = R × b a n d w i d t h × 2 π Ki = R\times bandwidth\times2\pi Ki=R×bandwidth×2π
解释:
使用5208云台电机,通过万用表等仪器测得电阻为 11.4Ω,电感由于没有专业仪器,只好参考相似型号电机,估测为 3mH 左右(由于电机是闲鱼买的,没有详细参数,后面可以通过细调Kp参数来解决)。使用并联型PI,带宽这里取300Hz,可得:
K
p
=
0.003
×
300
×
2
π
=
5.625
Kp = 0.003\times 300\times2\pi=5.625
Kp=0.003×300×2π=5.625
K i = 11.4 × 300 × 2 π = 21477.6 Ki = 11.4\times 300\times2\pi=21477.6 Ki=11.4×300×2π=21477.6
但由于我使用ADC的原始值作为反馈信号,因此PI参数也要相应的改变一下。由前面的公式计算得到: 电流 = ADC原始值 / 500,因此PI参数也要除以500。还有一点也要注意,算出来的Ki参数是不包含积分时间的,因此要补上,我这里的积分时间是 1 / 8000 秒。所以最终的PI参数为:
K
p
=
5.625
÷
500
=
0.01125
Kp = 5.625\div500=0.01125
Kp=5.625÷500=0.01125
K i = 21477.6 ÷ 500 ÷ 8000 = 0.00537 Ki=21477.6 \div 500 \div 8000 = 0.00537 Ki=21477.6÷500÷8000=0.00537
下面把调好的参数下载到单片机里,看一下D轴电流的阶跃响应如何(这里暂时先不给Q轴赋值)

这里给定的目标值是200,也就是0.4A,可以看到响应波形是很漂亮的,除了上升和下降的终点处有一些毛刺。
下面将D轴的PI参数原封不动的赋给Q轴试试:

这里D轴给定值为0,Q轴给定值仅为50(0.1A),但由于电机空载电流达不到0.1A,因此Q轴电流环积分项迅速饱和,此时电机正全速旋转。
我们将D轴设定值设为0,Q轴设定值设为200,然后用手反复堵转电机看一看响应波形:

当电机堵转时,Q轴电流被限制在200(0.4A)附近;当松开电机时,电机迅速地恢复全速转动,且Q轴电流仅为空载电流。并且当Q轴的设定值越大,堵转时电机的输出转矩越大。
至此,电流环的调试基本完成,大家可以参考这三张图来判断电流环的调试是否正确。第三张图的Q轴电流存在超调是因为之前全速转动的时候积分项已完全饱和,突然的堵转使积分项来不及释放干净而导致过冲,解决的办法是使用抗饱和的PI控制器,如动态积分限幅等。但如果是要求不高的场合,正确的静态积分限幅已经足够了。
解释:
参考资料:
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
如何学习ruby的正则表达式?(对于假人) 最佳答案 http://www.rubular.com/在Ruby中使用正则表达式时是一个很棒的工具,因为它可以立即将结果可视化。 关于ruby-我如何学习ruby的正则表达式?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/1881231/
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
写在之前Shader变体、Shader属性定义技巧、自定义材质面板,这三个知识点任何一个单拿出来都是一套知识体系,不能一概而论,本文章目的在于将学习和实际工作中遇见的问题进行总结,类似于网络笔记之用,方便后续回顾查看,如有以偏概全、不祥不尽之处,还望海涵。1、Shader变体先看一段代码......Properties{ [KeywordEnum(on,off)]USL_USE_COL("IsUseColorMixTex?",int)=0 [Toggle(IS_RED_ON)]_IsRed("IsRed?",int)=0}......//中间省略,后续会有完整代码 #pragmamulti_c
TCL脚本语言简介•TCL(ToolCommandLanguage)是一种解释执行的脚本语言(ScriptingLanguage),它提供了通用的编程能力:支持变量、过程和控制结构;同时TCL还拥有一个功能强大的固有的核心命令集。TCL经常被用于快速原型开发,脚本编程,GUI和测试等方面。•实际上包含了两个部分:一个语言和一个库。首先,Tcl是一种简单的脚本语言,主要使用于发布命令给一些互交程序如文本编辑器、调试器和shell。由于TCL的解释器是用C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,所以,Tcl是
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭9年前。我来自C、php和bash背景,很容易学习,因为它们都有相同的C结构,我可以将其与我已经知道的联系起来。然后2年前我学了Python并且学得很好,Python对我来说比Ruby更容易学。然后从去年开始,我一直在尝试学习Ruby,然后是Rails,我承认,直到现在我还是学不会,讽刺的是那些打着简单易学的烙印,但是对于我这样一个老练的程序员来说,我只是无法将它