目录
3.2 Masked Multi-Head Attention
3.3 基于Encoder-Decoder 的Multi-Head Attention
一、多层感知机(MLP)原理简介
多层感知机(MLP,Multilayer Perceptron)也叫人工神经网络(ANN,Artificial Neural Network),除了输入输出层,它中间可以有多个隐层,最简单的MLP只含一个隐层,即三层的结构,如下图:

从上图可以看到,多层感知机层与层之间是全连接的。多层感知机最底层是输入层,中间是隐藏层,最后是输出层。
1)隐藏层的神经元怎么得来?
首先它与输入层是全连接的,假设输入层用向量X表示,则隐藏层的输出就是 f (W1X+b1),W1是权重(也叫连接系数),b1是偏置,函数f 可以是常用的sigmoid函数或者tanh函数。
2)输出层,输出层与隐藏层是什么关系?
其实隐藏层到输出层可以看成是一个多类别的逻辑回归,也即softmax回归,所以输出层的输出就是softmax(W2X1+b2),X1表示隐藏层的输出f(W1X+b1)。
MLP整个模型就是这样子的,上面说的这个三层的MLP用公式总结起来就是
,函数G是softmax。
因此,MLP所有的参数就是各个层之间的连接权重以及偏置,包括W1、b1、W2、b2。对于一个具体的问题,怎么确定这些参数?求解最佳的参数是一个最优化问题,解决最优化问题,最简单的就是梯度下降法了(SGD):首先随机初始化所有参数,然后迭代地训练,不断地计算梯度和更新参数,直到满足某个条件为止(比如误差足够小、迭代次数足够多时)。这个过程涉及到代价函数、规则化(Regularization)、学习速率(learning rate)、梯度计算等。
在有明确的训练样本后,网络的输入层结点数(特征的数量)和输出层结点数(因变量的数量)便已确定,因此神经网络结构设计主要解决设置几个隐含层和每个隐含层设置几个结点的问题,w和v都是通过对数据的学习得出的。
一般来讲,对于小规模数据集或者简单数据集,节点数量设置为10就己经足够了,但是对于大规模数据集或者复杂数据集来说,有两种方式可供选择:增加隐藏层中的节点数量;添加更多的隐藏层。在大型神经网络当中,往往有很多这样的隐藏层,这也是“深度学习”中“深度”二字的来源。
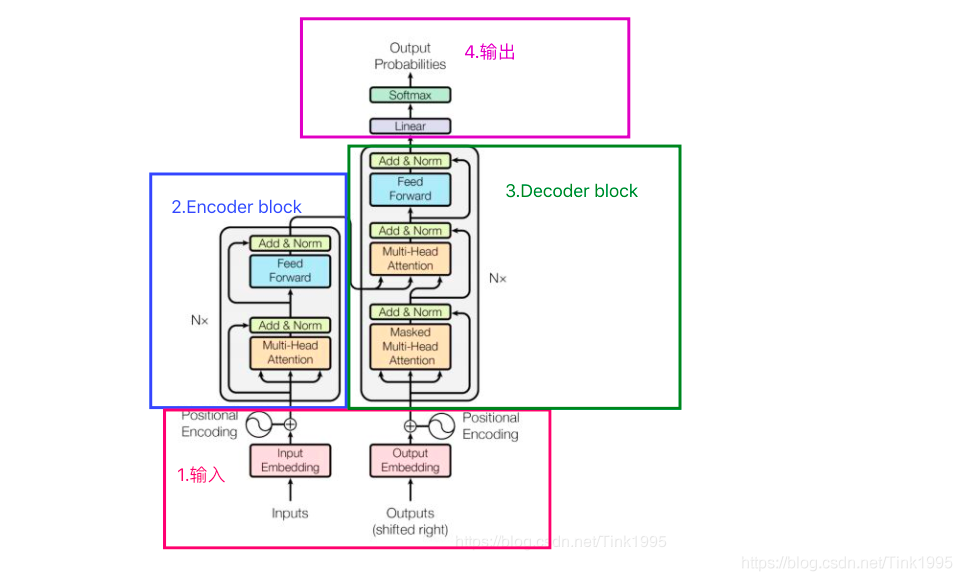
图1:Transformer的结构图,拆解开来,主要分为图上4个部分,其中最重要的就是2和3Encoder-Decoder部分,对咯,Transformer是一个基于Encoder-Decoder框架的模型。
Transformer输入是一个序列数据,以"Tom chase Jerry" 翻译成中文"汤姆追逐杰瑞"为例:

Encoder 的 inputs就是"Tom chase Jerry" 分词后的词向量。可以是任意形式的词向量,如word2vec,GloVe,one-hot编码。
假设上图中每一个词向量都是一个512维的词向量。
为什么需要添加位置编码呢?
首先,咱们知道,一句话中同一个词,如果词语出现位置不同,意思可能发生翻天覆地的变化,就比如:我欠他100W 和 他欠我100W。这两句话的意思一个地狱一个天堂。可见获取词语出现在句子中的位置信息是一件很重要的事情。但是咱们的Transformer 的是完全基于self-Attention的,而self-attention是不能获取词语位置信息地,就算打乱一句话中词语的位置,每个词还是能与其他词之间计算attention值,就相当于是一个功能强大的词袋模型,对结果没有任何影响。(一会儿在介绍Encoder的时候再详细说明)所以在输入的时候需要给每一个词向量添加位置编码。
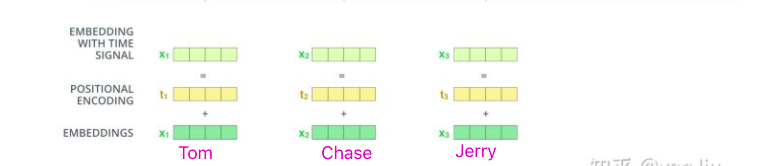
《Attention Is All You Need》论文中Transformer使用的是正余弦位置编码。位置编码通过使用不同频率的正弦、余弦函数生成,然后和对应的位置的词向量相加,位置向量维度必须和词向量的维度一致。过程如上图,PE(positional encoding)计算公式如下:
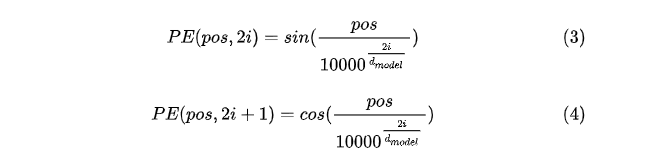
解释一下上面的公式:
pos表示单词在句子中的绝对位置,pos=0,1,2…,例如:Jerry在"Tom chase Jerry"中的pos=2;dmodel表示词向量的维度,在这里dmodel=512;2i和2i+1表示奇偶性,i表示词向量中的第几维,例如这里dmodel=512,故i=0,1,2…255。
至于上面这个公式是怎么得来地,其实不重要,因为很有可能是作者根据经验自己造地,而且公式也不是唯一地,后续goole在bert中的positional encoding也没有再使用这种方法而是通过训练PE,说明这种求位置向量的方法还是存在一定问题地。
Transformer 的 Decoder的输入与Encoder的输出处理方法步骤是一样地,一个接受source数据,一个接受target数据,对应到上面例子里面就是:Encoder接受英文"Tom chase Jerry",Decoder接受中文"汤姆追逐杰瑞"。只是在有target数据时也就是在进行有监督训练时才会接受Outputs Embedding,进行预测时则不会接收。
图1第2部分 Encoder block。Encoder block是由6个encoder堆叠而成,Nx=6。图中的灰框部分就是一个encoder的内部结构,从图中我们可以看出一个encoder由Multi-Head Attention 和全连接神经网络Feed Forward Network构成。
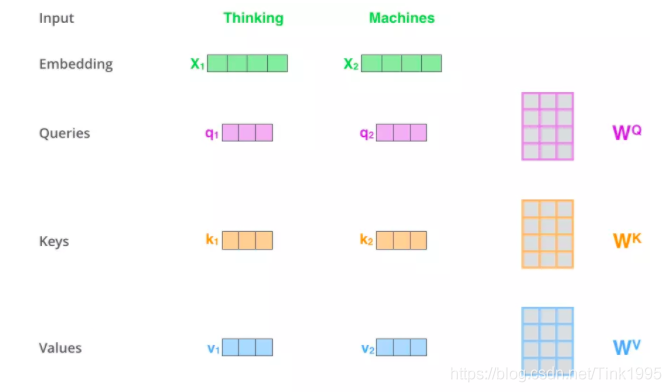
首先,回顾一下self-attention,假如输入序列是"Thinking Machines",X1,X2就是对应地"Thinking"和"Machines"添加过位置编码之后的词向量,然后词向量通过三个权值矩阵,
,
转变成为计算Attention值所需的Query,Keys,Values向量。
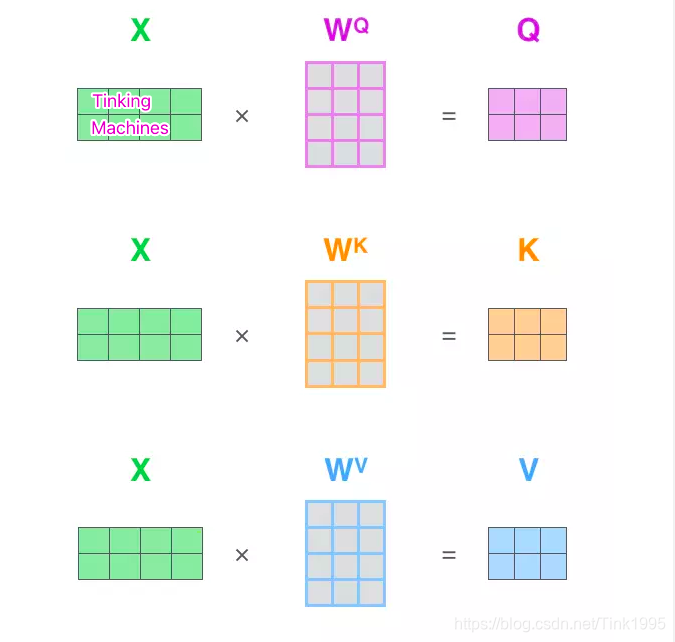
因为咱们再实际使用中,每一个样本,也就是每一条序列数据都是以矩阵的形式输入地,故可以看到上图中,X矩阵是由"Tinking"和"Machines"词向量组成的矩阵,然后跟过变换得到Q,K,V。假设词向量是512维,X矩阵的维度是(2,512),,
,
均是(512,64)维,得到的Query,Keys,Values就都是(2,64)维。

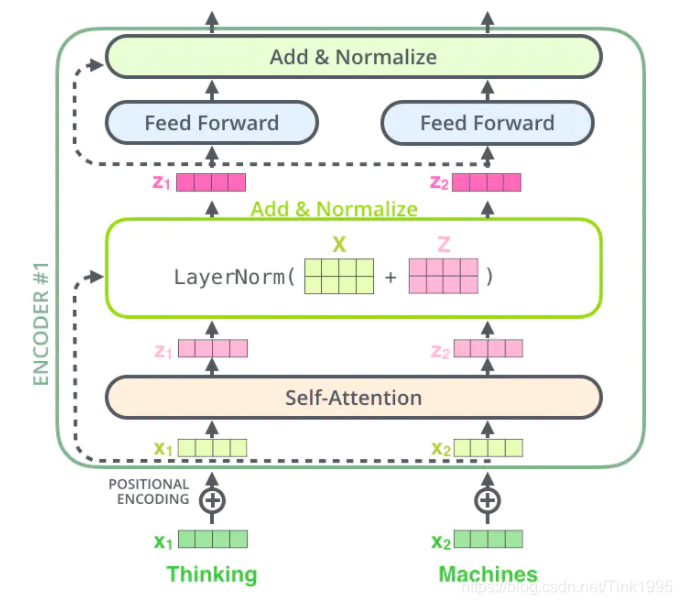
从上图中可以看到,在经过Multi-Head Attention得到矩阵Z之后,并没有直接传入全连接神经网络FNN,而是经过了一步:Add&Normalize。
Add
Add,就是在Z的基础上加了一个残差块X,加入残差块X的目的是为了防止在深度神经网络训练中发生退化问题,退化的意思就是深度神经网络通过增加网络的层数,Loss逐渐减小,然后趋于稳定达到饱和,然后再继续增加网络层数,Loss反而增大。
Normalize
在神经网络进行训练之前,都需要对于输入数据进行Normalize归一化,目的有二:1,能够加快训练的速度。2.提高训练的稳定性。
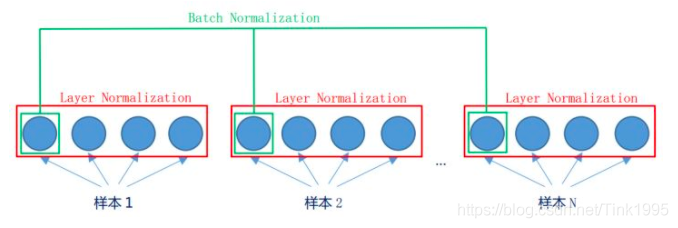
先看图,LN是在同一个样本中不同神经元之间进行归一化,而BN是在同一个batch中不同样本之间的同一位置的神经元之间进行归一化。
BN是对于相同的维度进行归一化,但是咱们NLP中输入的都是词向量,一个300维的词向量,单独去分析它的每一维是没有意义地,在每一维上进行归一化也是适合地,因此这里选用的是LN。
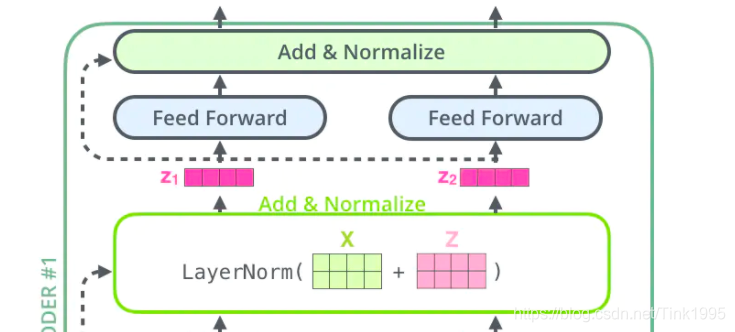

这里的全连接层是一个两层的神经网络,先线性变换,然后ReLU非线性,再线性变换。
这里的x就是我们Multi-Head Attention的输出Z,还是引用上面的例子,那么Z是(2,64)维的矩阵,假设W1是(64,1024),其中W2与W1维度相反(1024,64),那么按照上面的公式:
FFN(Z)=(2,64)x(64,1024)x(1024,64)=(2,64),我们发现维度没有发生变化,这两层网络就是为了将输入的Z映射到更加高维的空间中(2,64)x(64,1024)=(2,1024),然后通过非线性函数ReLU进行筛选,筛选完后再变回原来的维度。
然后经过Add&Normalize,输入下一个encoder中,经过6个encoder后输入到decoder中。
第3部分 Decoder block。Decoder block也是由6个decoder堆叠而成,Nx=6。上图3中的灰框部分就是一个decoder的内部结构,从图中我们可以看出一个decoder由Masked Multi-Head Attention,Multi-Head Attention 和 全连接神经网络FNN构成。比Encoder多了一个Masked Multi-Head Attention,其他的结构与encoder相同,那么咱们就先来看看这个Masked Multi-Head Attention。
Decoder的输入分为两类:
一种是训练时的输入,一种是预测时的输入。
训练时的输入就是已经对准备好对应的target数据。例如翻译任务,Encoder输入"Tom chase Jerry",Decoder输入"汤姆追逐杰瑞"。
预测时的输入,一开始输入的是起始符,然后每次输入是上一时刻Transformer的输出。例如,输入"",输出"汤姆",输入"汤姆",输出"汤姆追逐",输入"汤姆追逐",输出"汤姆追逐杰瑞",输入"汤姆追逐杰瑞",输出"汤姆追逐杰瑞"结束。
与Encoder的Multi-Head Attention计算原理一样,只是多加了一个mask码。mask 表示掩码,它对某些值进行掩盖,使其在参数更新时不产生效果。Transformer 模型里面涉及两种 mask,分别是 padding mask 和 sequence mask。为什么需要添加这两种mask码呢?
1.padding mask
什么是 padding mask 呢?因为每个批次输入序列长度是不一样的也就是说,我们要对输入序列进行对齐。具体来说,就是给在较短的序列后面填充 0。但是如果输入的序列太长,则是截取左边的内容,把多余的直接舍弃。因为这些填充的位置,其实是没什么意义的,所以我们的attention机制不应该把注意力放在这些位置上,所以我们需要进行一些处理。
具体的做法是,把这些位置的值加上一个非常大的负数(负无穷),这样的话,经过 softmax,这些位置的概率就会接近0!
2.sequence mask
sequence mask 是为了使得 decoder 不能看见未来的信息。对于一个序列,在 time_step 为 t 的时刻,我们的解码输出应该只能依赖于 t 时刻之前的输出,而不能依赖 t 之后的输出。因此我们需要想一个办法,把 t 之后的信息给隐藏起来。这在训练的时候有效,因为训练的时候每次我们是将target数据完整输入进decoder中地,预测时不需要,预测的时候我们只能得到前一时刻预测出的输出。
那么具体怎么做呢?也很简单:产生一个上三角矩阵,上三角的值全为0。把这个矩阵作用在每一个序列上,就可以达到我们的目的。
上面可能忘记说了,在Encoder中的Multi-Head Attention也是需要进行mask地,只不过Encoder中只需要padding mask即可,而Decoder中需要padding mask和sequence mask。OK除了这点mask不一样以外,其他的部分均与Encoder一样啦~
Add&Normalize也与Encoder中一样,接下来就到了Decoder中第二个Multi-Head Attention,这个Multi-Head Attention又与Encoder中有一点点不一样。
Encoder中的Multi-Head Attention是基于Self-Attention地,Decoder中的第二个Multi-Head Attention就只是基于Attention,它的输入Quer来自于Masked Multi-Head Attention的输出,Keys和Values来自于Encoder中最后一层的输出。
为啥Decoder中要搞两个Multi-Head Attention呢?
我个人理解是第一个Masked Multi-Head Attention是为了得到之前已经预测输出的信息,相当于记录当前时刻的输入之间的信息的意思。第二个Multi-Head Attention是为了通过当前输入的信息得到下一时刻的信息,也就是输出的信息,是为了表示当前的输入与经过encoder提取过的特征向量之间的关系来预测输出。
经过了第二个Multi-Head Attention之后的Feed Forward Network与Encoder中一样,然后就是输出进入下一个decoder,如此经过6层decoder之后到达最后的输出层。
首先,经过一次线性变换,然后Softmax得到输出的概率分布,然后通过词典,输出概率最大的对应的单词作为我们的预测输出。
优点:
1.效果好
2.可以并行训练,速度快
3.很好地解决了长距离依赖的问题
缺点:
1.完全基于self-attention,对于词语位置之间的信息有一定的丢失,虽然加入了positional encoding来解决这个问题,但也还存在着可以优化的地方。
参考文章:
多层感知机(MLP)简介_北漂奋斗者的博客-CSDN博客_mlp
(六十七)神经网络——MLP_小粉桥反手王的博客-CSDN博客_mlp神经网络
史上最小白之Transformer详解_Stink1995的博客-CSDN博客_transformer神经网络
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
Transformers开始在视频识别领域的“猪突猛进”,各种改进和魔改层出不穷。由此作者将开启VideoTransformer系列的讲解,本篇主要介绍了FBAI团队的TimeSformer,这也是第一篇使用纯Transformer结构在视频识别上的文章。如果觉得有用,就请点赞、收藏、关注!paper:https://arxiv.org/abs/2102.05095code(offical):https://github.com/facebookresearch/TimeSformeraccept:ICML2021author:FacebookAI一、前言Transformers(VIT)在图
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
如何学习ruby的正则表达式?(对于假人) 最佳答案 http://www.rubular.com/在Ruby中使用正则表达式时是一个很棒的工具,因为它可以立即将结果可视化。 关于ruby-我如何学习ruby的正则表达式?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/1881231/
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
写在之前Shader变体、Shader属性定义技巧、自定义材质面板,这三个知识点任何一个单拿出来都是一套知识体系,不能一概而论,本文章目的在于将学习和实际工作中遇见的问题进行总结,类似于网络笔记之用,方便后续回顾查看,如有以偏概全、不祥不尽之处,还望海涵。1、Shader变体先看一段代码......Properties{ [KeywordEnum(on,off)]USL_USE_COL("IsUseColorMixTex?",int)=0 [Toggle(IS_RED_ON)]_IsRed("IsRed?",int)=0}......//中间省略,后续会有完整代码 #pragmamulti_c
文章目录1.自动驾驶实战:基于Paddle3D的点云障碍物检测1.1环境信息1.2准备点云数据1.3安装Paddle3D1.4模型训练1.5模型评估1.6模型导出1.7模型部署效果附录show_lidar_pred_on_image.py1.自动驾驶实战:基于Paddle3D的点云障碍物检测项目地址——自动驾驶实战:基于Paddle3D的点云障碍物检测课程地址——自动驾驶感知系统揭秘1.1环境信息硬件信息CPU:2核AI加速卡:v100总显存:16GB总内存:16GB总硬盘:100GB环境配置Python:3.7.4框架信息框架版本:PaddlePaddle2.4.0(项目默认框架版本为2.3
