文章目录
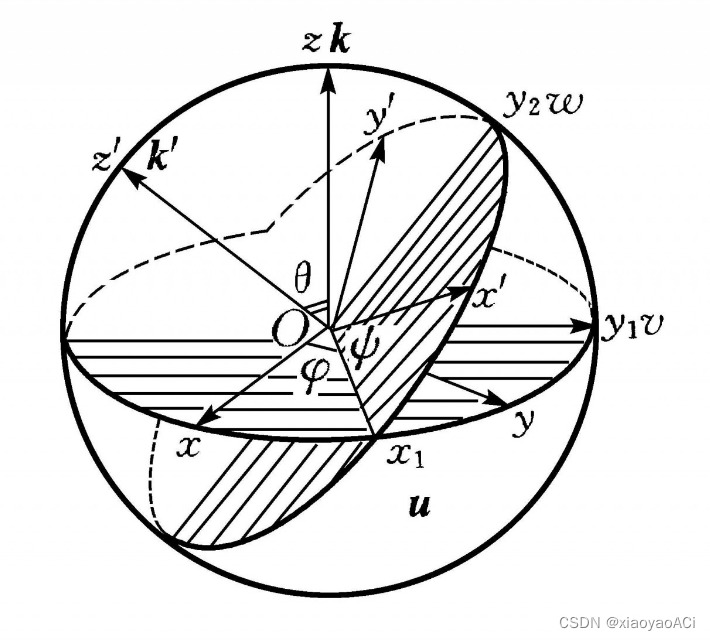
什么是欧拉角?百科上是这样解释的:用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角φ组成,为欧拉首先提出而得名。
很难理解吧?其实我们没有必要把欧拉角想得太复杂。
对于开发者来说,欧拉角就是用一个Vector3变量来记录物体沿着x、y、z轴的旋转。注意,虽然这是一个Vector3变量,但它并不是向量,这个变量的x、y、z三个分量是用来描述旋转的。
欧拉角特点:
万向节,也叫平衡环架(Gimbal),具有枢纽的装置,使得一物体能以单一轴旋转。由彼此垂直的枢纽轴所组成的一组三只平衡环架,则可使架在最内的环架的物体维持旋转轴不变。常常应用于船上的陀螺仪、罗盘、饮料杯架等。
在飞行器的航行中,进行XYZ三个方向旋转的旋转有专业的术语,见下图:
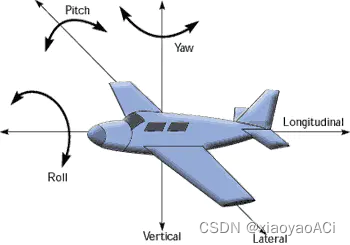
沿着机身右方轴(Unity中的+X)进行旋转,称为pitch,中文叫俯仰。
沿着机头上方轴(Unity中的+Y)进行旋转,称为Yaw,中文叫偏航。
沿着机头前方轴(Unity中的+Z)进行旋转,称为Roll,中文叫桶滚。
欧拉角的旋转就是沿着万向节的轴旋转的。目前人类最常用也最容易理解的方式是先沿着X轴旋转,再沿着Y轴旋转,最后沿着Z轴旋转,最后达到目标旋转角度。如下图所示:
这时候可能就有人会有疑问了,为什么不能三个轴同时旋转呢?
实际上,如果三个轴同时旋转,将会无法达到你预期的旋转效果。为什么呢?因为物体是一个整体,当某一个轴进行旋转时,其他的轴是跟着物体一起动的,如果还是按照原来的旋转角度旋转则会随着其他轴的转动形成偏移,如下图所示:
我们想要的其实只是让箭头指向我们,但三个轴同时旋转却使这个旋转轨迹划出了一个不应该有的弧线。
所以我们要了解的是,欧拉旋转是一定要有顺序的。这样的问题其实是无法避免的,但是我们可以根据物体的旋转情况对此进行优化,这个优化的方法就是给三个轴指定一个新的层级顺序。
当然这并不是真正的解决了问题,只是尽量避免了问题而已。欧拉角的问题是无法彻底解决的,
对于一个方位,存在多个欧拉角描述,因此无法判断多个欧拉角代表的唯一是否相同。
例如:
为了保证任意方位都只有独一无二的表示,Unity引擎限制了角度范围,即沿x轴旋转限制在 -90 ~ 90 之间,沿 y 与 z 轴旋转限制在 0 ~ 360 之间。
当物体沿 x 轴旋转
±
90
°
\ \plusmn 90°
±90° ,自身坐标系z轴与世界坐标系y轴将重合,此时再沿y轴或z轴旋转时,将会失去一个自由度。
Unity的优化方案:在万向节死锁的情况下,规定沿z轴完成绕竖直轴的全部旋转,即此时y轴旋转为0。
关于万向节锁的讲解视频:https://v.youku.com/v_show/id_XNjk1MTkzMTM2.html#paction
在使用欧拉旋转的情况下,万向节锁的情况是无法避免的,为了更好的表示旋转,Unity引入了四元数的概念。
四元数在3D图形学中代表旋转,由一个三维向量 / [ x , y , z ] / [x, y, z] /[x,y,z] 和一个标量 / w / w /w 组成。
旋转轴为
V
V
V ,旋转弧度为
θ
\theta
θ ,若使用四元数表示,则四个分量为:
x
=
S
i
n
(
θ
/
2
)
∗
V
.
x
y
=
S
i
n
(
θ
/
2
)
∗
V
.
y
z
=
S
i
n
(
θ
/
2
)
∗
V
.
z
w
=
C
o
s
(
θ
/
2
)
x = Sin(\theta / 2) * V.x \\ y = Sin(\theta / 2) * V.y \\ z = Sin(\theta / 2) * V.z \\ w = Cos(\theta / 2)
x=Sin(θ/2)∗V.xy=Sin(θ/2)∗V.yz=Sin(θ/2)∗V.zw=Cos(θ/2)
四个分量的值都在 -1 到 1 之间。
几何应用:四元数与向量相乘,可以实现向量的旋转。
代码:
// 获取四元数
Quaternion qt = this.transform.rotation;
// 使用四元数做旋转
this.transform.rotation = Quaternion.Euler(0, 50, 0);
// 或者调用Rotation方法实现旋转
this.transform.Rotation(0, 50, 0);
四元数旋转角度相加需要用 * 乘法,而不是加法。
Transform 中的 rotation 使用的是四元数,有时我们需要获取 Transform 沿某一个轴旋转的角度,此时可以用下面的代码进行计算:
Quaternion q = transform.rotation;
// 计算X轴旋转角度
float angleX = 0;
float siny_cosp1 = 2 * (q.w * q.x + q.z * q.y);
float cosy_cosp1 = 1 - 2 * (q.y * q.y + q.x * q.x);
float radian1 = Mathf.Atan2(siny_cosp1, cosy_cosp1); // 求出弧度
angleX = radian1 * Mathf.Rad2Deg; // 转化角度
Debug.Log("=============" + angleX);
// 计算Z轴旋转角度
float angleZ = 0;
float siny_cosp2 = 2 * (q.w * q.z + q.x * q.y);
float cosy_cosp2 = 1 -2 * (q.y * q.y + q.z * q.z);
float radian2 = Mathf.Atan2(siny_cosp2, cosy_cosp2); // 求出弧度
angleZ = radian2 * Mathf.Rad2Deg; // 转化角度
Debug.Log("=============" + angleZ);
上述方法适用于物体只在一个轴上做了旋转的情况,Y轴的计算方法以此类推。
避免万向节死锁,完全沿自身轴(而不是全局轴)旋转。
难于使用,且存在不合法的数值。
Unity中提供了Quaternion类来处理四元数相关操作,该类的使用方法可以参考我的另外一篇文章:【Unity】Unity常用类:向量Vector3、四元数Quaternion
本文万向节部分内容参考了塞北烟云大神的文章,地址如下:https://www.jianshu.com/p/9f45e91a2391
更多内容请查看总目录【Unity】Unity学习笔记目录整理
?博客主页:https://xiaoy.blog.csdn.net?本文由呆呆敲代码的小Y原创,首发于CSDN??学习专栏推荐:Unity系统学习专栏?游戏制作专栏推荐:游戏制作?Unity实战100例专栏推荐:Unity实战100例教程?欢迎点赞?收藏⭐留言?如有错误敬请指正!?未来很长,值得我们全力奔赴更美好的生活✨------------------❤️分割线❤️-------------------------
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
目录1.AdmobSDK下载地址2.将下载好的unityPackagesdk导入到unity里编辑 3.解析依赖到项目中
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
写在之前Shader变体、Shader属性定义技巧、自定义材质面板,这三个知识点任何一个单拿出来都是一套知识体系,不能一概而论,本文章目的在于将学习和实际工作中遇见的问题进行总结,类似于网络笔记之用,方便后续回顾查看,如有以偏概全、不祥不尽之处,还望海涵。1、Shader变体先看一段代码......Properties{ [KeywordEnum(on,off)]USL_USE_COL("IsUseColorMixTex?",int)=0 [Toggle(IS_RED_ON)]_IsRed("IsRed?",int)=0}......//中间省略,后续会有完整代码 #pragmamulti_c
三分钟集成Tap防沉迷SDK(Unity版)一、SDK介绍基于国家对上线所有游戏必须增加防沉迷功能的政策下,TapTap推出防沉迷SDK,供游戏开发者进行接入;允许未成年用户在周五、六、日以及法定节假日晚上8:00-9:00进行游戏,防沉谜时间段进入游戏会弹窗进行提示!开发环境要求:Unity2019.4或更高版本iOS10或更高版本Android5.0(APIlevel21)或更高版本🔗Unity集成Demo参考链接🔗UnityTapSDK功能体验APK下载链接二、集成前准备1.创建应用进入开发者后台,按照提示开始创建应用;2.开通服务在使用TDS实名认证和防沉迷服务之前,需要在上面创建的应
写在前面前两天学习并整理的大气散射基础知识:【Unity大气渲染】关于单次大气散射的理论知识,收获了很多,但不得不承认的是,这其实已经是最早的、90年代的非常古老的方法了,后来也出现了一些优化性的计算思路和方法。因此,我打算先不急着跟各种教程在Unity中实现大气散射,而是再花时间来看看最近的游戏是如何去实现大气渲染的:06.游戏中地形大气和云的渲染(下)|GAMES104-现代游戏引擎:从入门到实践接下来就跟着GAMES104讲地形大气和云渲染的部分学习并做简单的记录,涉及到之前没提到的Mie散射也只选择直接截图PPT的方式记录啦!毕竟对于做作品来说,之后实现出来才是重要的~当然,May佬的
所以我看到unity支持c#、JS和Boo。我可以学习其中一个,但我想制作一个“编译器”或类似的东西,让我可以编写ruby代码并输出JS代码或制作一个可以被Unity编译器读取的层。这有可能吗?我愿意在这方面投入很多时间并且有相当多的经验。 最佳答案 如果您的问题实际上是“我如何将Ruby编译为JavaScript”,那么这更容易回答:Opal:RubytoJavaScriptcompiler但是,学习其中一种受支持的语言会更好。当运行的是用另一种语言解释的代码时,很难调试“您的”代码。
一、习惯约定图片来自PSINS(高精度捷联惯导算法)PSINS工具箱入门与详解.pptx二、基本旋转矩阵绕x轴逆时钟旋转α\alphaα角度Rx(α)=[ 1000cosαsinα0−sinαcosα]R_x(\alpha)=\begin{bmatrix}\1&0&0\\0&\cos\alpha&\sin\alpha\\0&-\sin\alpha&\cos\alpha\end{bmatrix}Rx(α)= 1000cosα−sinα0sinαcosα绕y轴逆时钟旋转α\alphaα角度Ry(α)=[ cosα0−sinα010sinα0cosα]R_y(\alpha
欧拉角、旋转矩阵及四元数1.简介2.欧拉角2.1欧拉角定义2.2右手系和左手系2.3转换流程3.旋转矩阵4.四元数4.1四元数与欧拉角和旋转矩阵之间等效变换4.2测试Matlab代码5.总结1.简介常用姿态参数表达方式包括方向余弦矩阵、欧拉轴/角参数、欧拉角、四元数以及罗德里格参数等。高分辨率光学遥感卫星主要采用欧拉角与四元数对姿态参数进行描述。这里着重讲解欧拉角、旋转矩阵和四元数。2.欧拉角2.1欧拉角定义欧拉角是表征刚体旋转的一种方法之一,由莱昂哈德·欧拉引入的三个角度,用于描述刚体相对于固定坐标系的方向。在摄影测量、空间科学或其它技术领域,一般用一组(三个)欧拉角描述两个空间坐标之间的旋