以Razavi的带隙基准章节为例。右图中,M1和M2为NMOS,M3和M4为PMOS。其中两个NMOS宽长比相同。Rs的作用是确定电流。
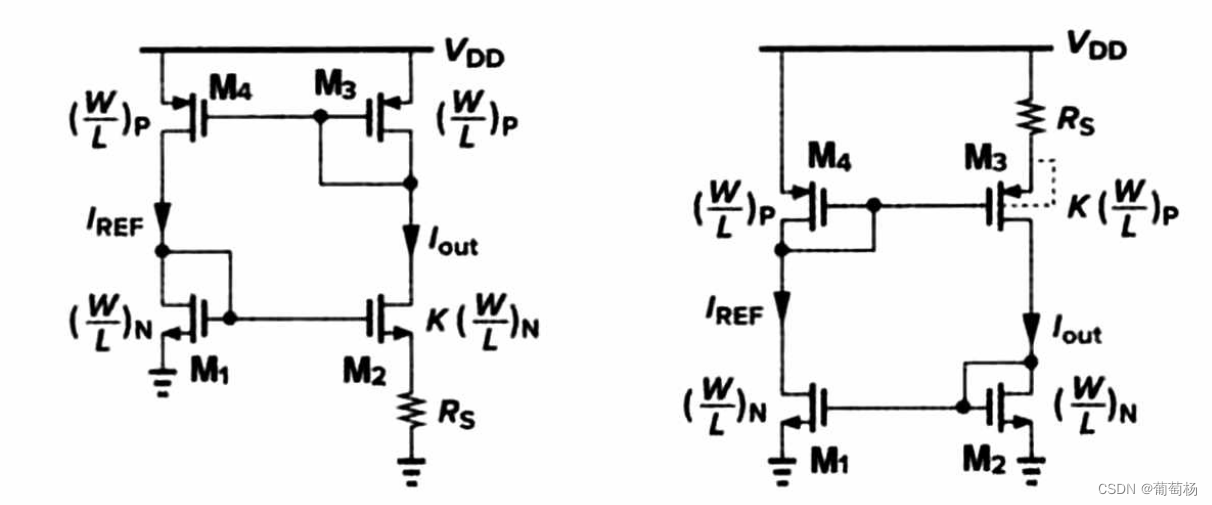 图1. 带隙基准电路1
图1. 带隙基准电路1
基于公式3:
将公式4左右同时除以(不等于0),此时认为M4和M3的阈值电压相等,可以消掉|Vtp|。M3的宽长比是M4的N倍,并且认为Iref与Iout相等。可以推导出
K =2
Rs = 2k
W/L = 1um/40nm
可通过工艺库或者仿真得出
本文以beta0作为的值,
利用python进行计算:
from sympy import *
i_out = symbols('i_out')
k = 2
Rs = 2000
um = 10^(-6)
nm = 10^(-9)
w_to_l = 1*um/(40*nm)
mu_p_cox = symbols('mu_p_cox')
mu_p_cox_value = 17.64
print(solve( ( (2/(mu_p_cox*w_to_l)) * (1/Rs**2) * (1 - 1/sqrt(k))**2 )/i_out -1, i_out))
print(solve( ( (2/(mu_p_cox_value*w_to_l)) * (1/Rs**2) * (1 - 1/sqrt(k))**2 )/i_out -1, i_out))

仿真电路图:
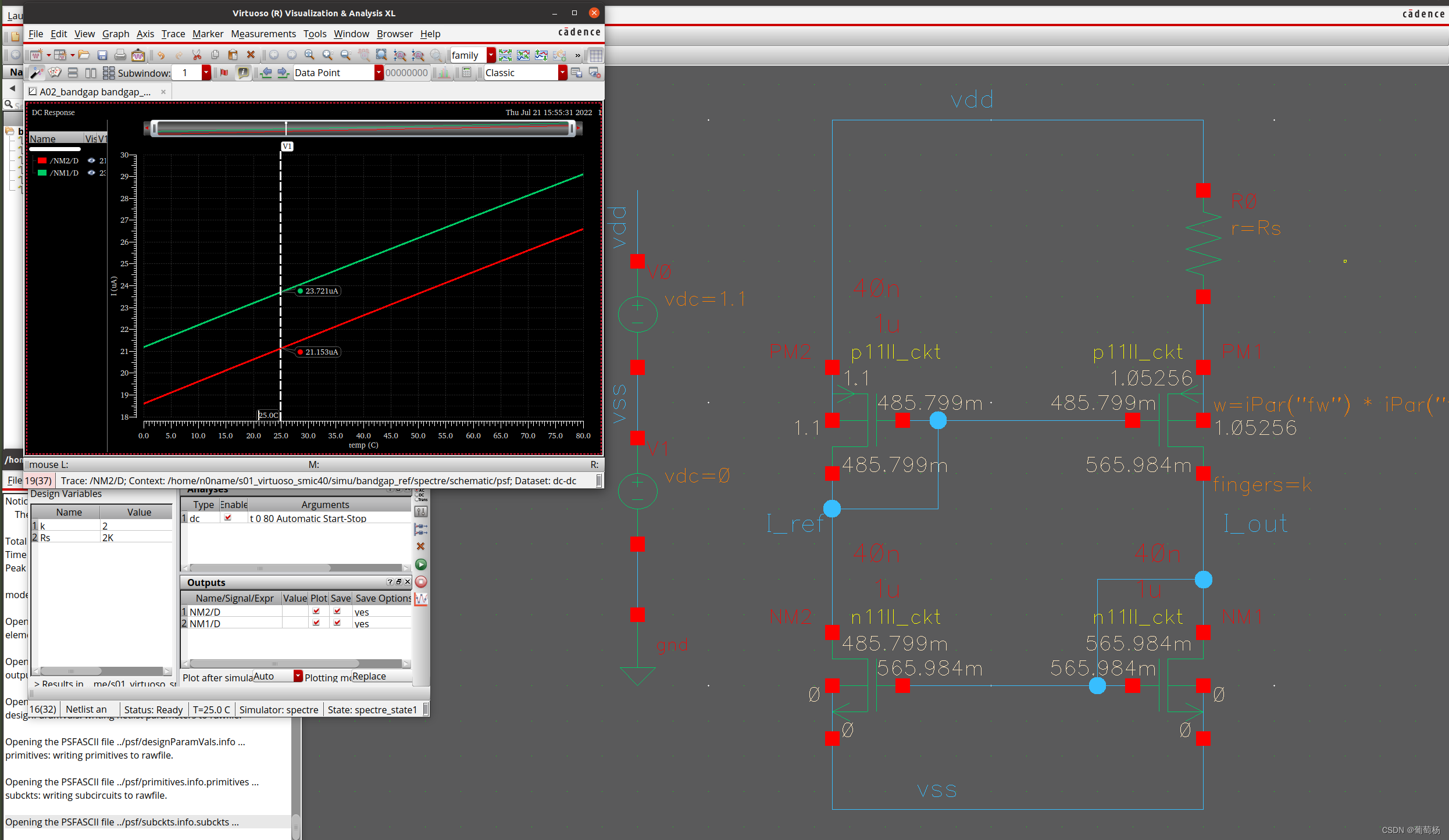
波形横坐标为温度,发现温度越高,电流越大。
四、其他仿真结果
1. 宽长比不变,同时增大L和W的长度,设为2um/80nm。发现电流增大了

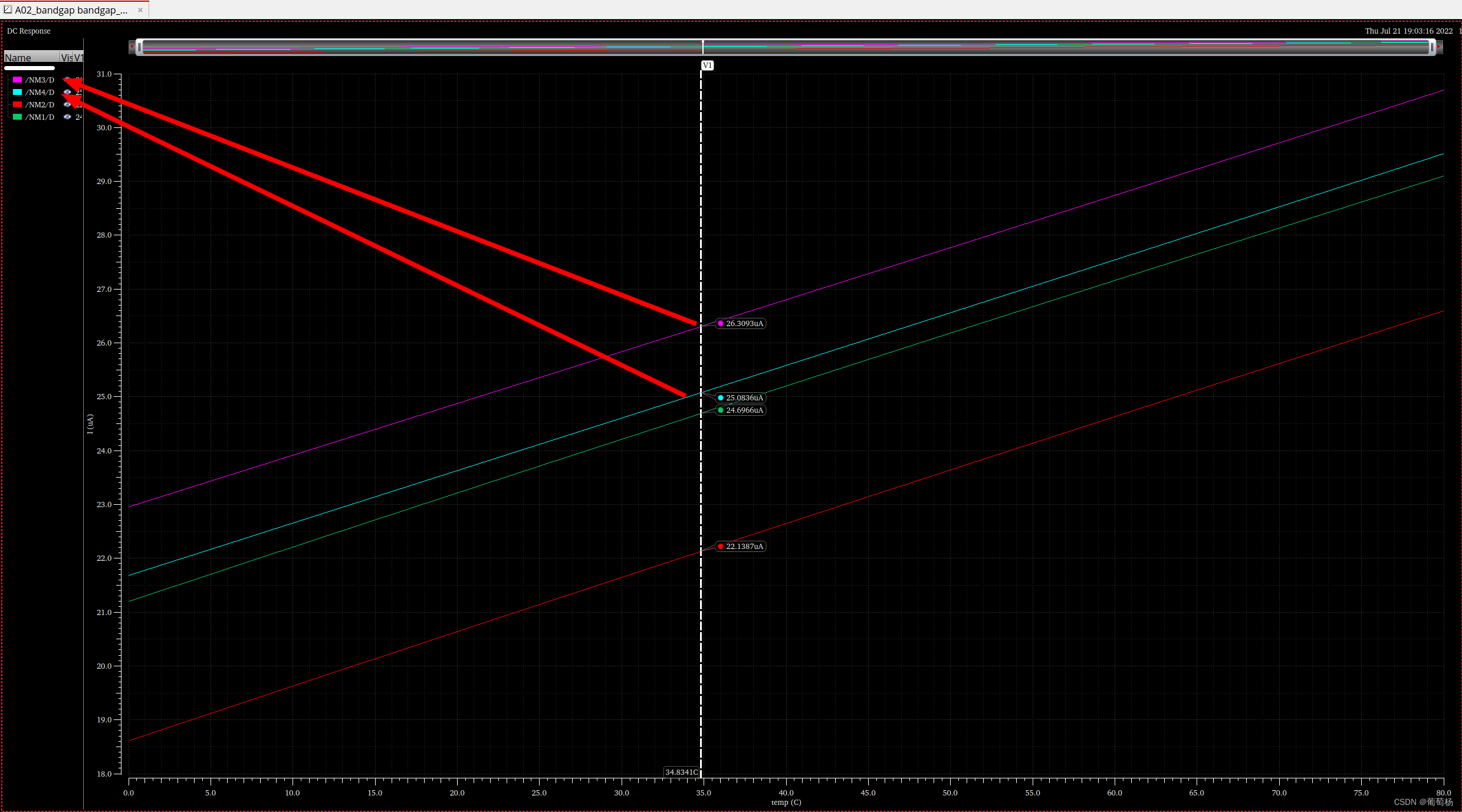
2. 将GD相连放在同一侧而非两侧
电流下降


目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
功能需求:主机使用一个串口,与两个从机进行双向通信,主机向从机发送数据,从机能够返回数据,由于结构限制,主机与从机之间只有3根线(电源、地、数据线),并且从机上没有设物理的电源开关,需要通过与主机连接的数据线来控制开机,总结如下:1、数据线只有1根2、能够双向通信3、主机能够控制从机开机4、主机可以单独向1个从机发数据,也可以同时向两个从机发送数据根据需求,设计出如下电路:工作原理分析:VCC_24V_IN、GND、LINE_L(LINE_R)三根线接线连接到从机,电源开启电路是从机内部的电源控制。开机的逻辑:*主机先上电,LINE_L因为主机的R1上拉而有高电平,使Q6导通,Q5的G极电压被
数组理论基础数组是存放在连续内存空间上的相同类型数据的集合。数组下标从0开始数组内存空间的地址是连续的c++中vector和array的区别1、vector是顺序容器,其利用连续的内存空间来存储元素,但是其内存空间大小是能够改变的。2、array是顺序容器,其也是利用连续的内存空间来存储元素,但它的内存空间是固定大小的,申请之后就无法改变。3、vector的底层是array实现的二维数组二维数组在内存的空间地址是连续的704|二分查找思路1、把整个数组一分为二;2、判断目标值在左区间还是右区间,若在左区间,则修改右区间指针的位置;若在右区间,则修改新区间的左区间位置3、重复上述过程,直到lef
1、单片机控制液晶显示模块1602LCD的显示。液晶显示器(LiquidCrystalDisplay,LCD)具有省电、体积小、抗干扰能力强等优点,LCD显示器分为字段型、字符型和点阵图形型。(1)字段型。以长条状组成字符显示,主要用于数字显示,也可用于显示西文字母或某些字符,广泛用于电子表、计算器、数字仪表中。(2)字符型。专门用于显示字母、数字、符号等。一个字符由5、7或5、10的点阵组成,在单片机系统中已广泛使用(3)点阵图形型。广泛用于图形显示,如笔记本电脑、彩色电视和游戏机等。它是在平板上排列的多行列的矩阵式的晶格点,点大小与多少决定了显示的清晰度。引脚包括8条数据线、3条控制线和3
特性工作电压范围:6V-14V输出功率:7W(CLASSD,7.4V/4Ω,THD=10%)10W(CLASSD,9V/4Ω,THD=10%)18W(CLASSD,12V/4Ω,THD=10%)最高可达92%效率(12V/8Ω)电平设置工作模式无需输出滤波器差分输入优异的“上电,掉电”噪声抑制过流保护、过热保护、欠压保护 eSOP-8封装典型应用电路很简单:如下是本人的设计。 输入电阻:输入电阻主要是确定增益,即输出功率,所以一定要确定输入信号的幅度,喇叭的幅度,前后使用有效值计算。此设计搭配的喇叭是8R3W,额定功率3W,额定电压4.89V(有效值),最大功率4W。我们先确定输入信号的赋值,
计数器同样由三个模块构成,分别为:顶层,计数器和译码器。一、实验任务大家这会儿数电理论课应该还没学到这里,所以对以上的部分名词进行解释:1.异步清零(clr)指不管现在时钟信号(clk)是什么,跑到哪儿了,只要你按下异步清零的按钮,计数器就应该马上归零。2.同步使能(en)其实就是一个计数器是否开始工作的开关,关闭了使能开关,计数器将会停在当前的计数值,不再随时间信号进行计数。3.同步置数(load)一个非常面向使用对象的功能。让使用者输入一个数值(预置数),再从这个数值进行加/减计数,因为是随着下一个时钟信号的到来才开始计数的,所以叫同步置数。二、实验分析输入信号:clkin(时钟),clr
[电路]系列文章目录1-发出功率和吸收功率关系2-独立源和受控源3-基尔霍夫定律4-两端电路等效变换、电阻串并联5-电压源、电流源的串联和并联6-电阻的星形连接和角形连接等效变换(星角变换)7-实际电源模型和等效变换8-无源一端口网络输入电阻9-电路的图及相关概念10-支路电流法11-网孔电流法12-回路电流法13-结点电压法14-叠加定理和齐性定理15-替代定理16-戴维宁定理和诺顿定理文章目录[电路]系列文章目录一、戴维宁定理1定义2图示说明3说明4例题二、诺顿定理1定义2图示说明3说明三、特殊说明一、戴维宁定理1定义任何一个线性含源一端口网络,对外电路来说,总可以用一个电压源和电阻的串联
⏩大家好哇!我是小光,嵌入式爱好者,一个想要成为系统架构师的大三学生。⏩去年下半年参加了全国仿真创新大赛,也是取得了国赛三等奖,省赛一等奖的好成绩。⏩本篇文章对我们的参赛作品《智能鱼缸》做一个简介。⏩感谢你的阅读,不对的地方欢迎指正。⏩如果对代码和文档有需要私信我。————————————————智能鱼缸一、需求分析二、技术方案三、功能展示proteus仿真展示实物展示四、应用前景五、总结一、需求分析随着我国经济的发展和人民生活水平的日益增长,人们的消费观在改变,消费档次与生平都在提高,人们的生活品位越来越高,环境的个性化、环保化越来越受到人们的重视,与之相关的休闲、居家装饰等行业相应的日线蓬